1.本发明涉及城市公共交通、智慧城市、和生态环境等领域,尤其涉及一种基于公交车和出租车的城市车辆移动感知能力测定方法。
背景技术:
2.针对城市环境监测、道路巡检、城市数字化等需求,目前所采用的普遍监测手段多基于卫星遥感和地面监测站。但是这两种监测手段存在着精度、效率和成本之间的矛盾,难以同时满足三个方面的高要求。在背景下,基于车载的移动监测能够很好地兼顾精度和效率,既能保证高精度,又能保证时效性。而利用第三方代理的非专用车辆来实现移动监测,能大幅度降低监测成本,成为城市感知和监测的新型有效手段,可同时满足高精度、高效率和低成本的要求。
3.然而,第三方代理的城市非专用车辆,如:公交车和出租车,只是顺带协助完成移动监测,其行驶路径并非专业化定制,导致其扫描区域并非最优。因此,欲使用最少的车辆完成最全研究区域的高精度监测,必须先对城市车辆的动态感知能力进行有效测定,掌握城市公交车和出租车的移动感知能力和规律。综上所述,城市车辆移动感知能力的测定方法有助于设计最优的移动监测方案,对智慧城市建设、生态环境监测有着重要意义。
技术实现要素:
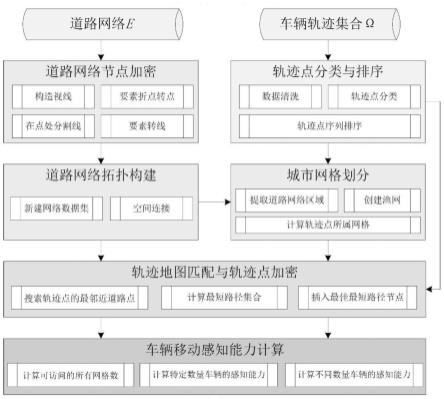
4.本发明公开了一种城市车辆移动感知能力测定方法,如图1所述,主要包括以下几个步骤。
5.(1)城市道路网络节点加密与拓扑构建。
6.在arcgis软件中,利用“构造视线”、“要素折点转点”、“在点处分割线”、以及“要素转线”四个功能,每隔一定距离d批量打断城市所有道路边e;启动arccatalog,对道路网络边e执行“新建网络数据集”,可生成道路网络节点n;在arcgis中计算每个道路节点i∈n的坐标pi,构成坐标集合p;在道路边e和道路网络节点n的基础上,利用“空间连接”功能,构建边-点拓扑关系r。
7.(2)海量浮动车辆轨迹点分类与时间排序。
8.海量轨迹数据集ω具有三个基本字段:车辆标志码id、轨迹点定位时间t
id
,轨迹点坐标p
id
。首先,对数据集ω进行清洗,去除掉任意字段id、t
id
、p
id
缺失或不正确的轨迹点;其次,依据车辆标志码id的不同,将ω拆分成多个独立子集{ω1,ω2,
…
,ωm},即ω1∪ω2∪
…
∪ωm=ω,同一个子集里面任意轨迹点和具有相同的车辆标志码id;再次,对同一个子集内的所有轨迹点按定位时间t
id
进行升序排列。
9.(3)城市网格划分。
10.给定一个城市所有道路边集合e和道路网络节点n,读取所有节点坐标中的最小和最大值,即x
min
,y
min
,x
max
,y
max
;利用arcgis的“创建渔网”功能,以像元宽度w
gird
和像元高度h
gird
创建渔网f;设置w
gird
》d且h
gird
》d;对于任意点(x,y),其所处的网格索引为
11.(4)浮动车辆轨迹地图匹配与轨迹点加密。
12.选取特定时间段内,某一车辆id的轨迹序列选取特定时间段内,某一车辆id的轨迹序列遍历任意相邻的轨迹点对([t
k1
,p
k1
],[t
k2
,p
k2
]),并做如下处理:首先,搜索距离p
k1
最近的n个最近的道路节点以及距离p
k2
最近的n个最近的道路节点其次,计算起点集合(p1,p2,
…
,pn)与终点集合(p
′1,p
′2,
…
,p
′n)任意两个起止点之间的最短路径集合(p1,p2,
…
,pn×n);再次,选取(p1,p2,
…
,pn×n)中长度最短的路径p
shortest
插入到p
k1
和p
k2
之间。
[0013]
(5)基于城市海量车辆轨迹的移动感知能力测定。
[0014]
统计包含道路节点的网格数量w;随机选取τ辆车辆的加密轨迹,将这些轨迹点根据坐标和公式搜索所有采样的网格,并统计其数量w;更改车辆数量τ,计算不同数量τ下的车辆移动感知能力
附图说明
[0015]
此处所说明的附图用来提供对本发明的进一步理解,构成本技术的一部分,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
[0016]
图1测定城市车辆移动感知能力的流程图;
[0017]
图2城市道路网络节点加密与拓扑构建流程图;
[0018]
图3浮动车辆轨迹地图匹配与轨迹点加密流程图。
具体实施方式
[0019]
为了使本技术领域的人员更好地理解本发明方案,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分的实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
[0020]
需要说明的是,本发明的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本发明的实施例能够以除了在这里图示或描述的那些以外的顺序实施。此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
[0021]
下面将结合附图2-附图3,对本发明实施例提供的城市车辆移动感知能力测定方法进行详细介绍。
[0022]
1.参见附图2,本发明实施例提供了一种城市道路网络节点加密与拓扑构建方法,
本发明实施例的所述方法可以包括以下步骤:
[0023]
1)在arcgis软件中显示给定的城市道路网络数据集e,其坐标系为wgs1984坐标系,并在道路网络的中心地区添加只包含一个点的点文件singlenode.shp。
[0024]
2)启动arcgis软件中的“构造视线”功能,“视点分析”选择singlenode.shp文件,“目标要素”选择数据集e对应的文件,“输出”设定为slightline.shp,“采样距离”即为打断距离d,可选择0.001,然后点击“确定”,即可生成slightline.shp。
[0025]
3)启动arcgis软件中的“要素折点转点”功能,“输入要素”选择slightline.shp,“输出要素类”选择slightline_vertices.shp,“点类型”选择both_ends模式,点击“确定”,生成slightline_vertices.shp。
[0026]
4)启动arcgis软件中的“在点处分割线”功能,“输入要素”选择数据集e对应的文件,“点要素”选择slightline_vertices.shp,“输出要素类”选择roadatpoint.shp,“搜索半径”选择“十进制度”下的0.0005,点击“确定”,生成roadatpoint.shp文件。
[0027]
5)启动“要素转线”功能,“输入要素”选择roadatpoint.shp,“输出要素类”设为road.shp,点击“确定”即可生成road.shp。
[0028]
6)启动arccatalog,在目录中找到road.shp文件,“右键”选择“新建网络数据集”,按照向导默认设置生成道路网络节点nd.shp。
[0029]
7)启动arcgis软件中的“空间连接”功能,“目标要素”选择road.shp,“连接要素”选择nd.shp,“输出要素类”选择roadnoderelation.shp,“连接操作”选择join_one_to_many,勾选“保留所有目标要素”,点击“确定”,生成roadnoderelation.shp文件。
[0030]
8)在roadnoderelation.shp文件,字段“_i d”为边的编号,字段
“”
为边的一个端点。对于任意的边ek,文件中存在两个不同的端点i和j,设定边ek的起止点分别为i和j;遍历整个roadnoderelation.shp文件,找出所有边的起止点,即构建道路网络的点-边拓扑关系,生成文件net.csv,包含字段edge_id,start_id和end_id,分别表示边号、起始点号、终止点号;将net.csv表示为集合e。
[0031]
9)在arcgis中打开nd.shp的属性表,添加双精度的“经度”和“纬度”字段,通过“计算几何”功能,分别计算“经度”和“纬度”为“点的x坐标”和“点的y坐标”,并导出点坐标文件nodecoordinate.shp,包含字段node_id,longitude,latitude,分别表示点号,经度和纬度。将nodecoordinate.shp表示为集合n。
[0032]
2.本发明实施例提供了一种海量浮动车辆轨迹点分类与时间排序方法,本发明实施例的所述方法可以包括以下步骤:
[0033]
1)对于任意的轨迹点δ∈ω,若其车辆标志码id、轨迹点定位时间t
id
,轨迹点坐标p
id
存在缺失,或者存在明显错误,如点坐标p
id
为(0,0),则删除轨迹点δ。遍历数据集ω中的轨迹点,并对其进行正确性判断,完成数据集清洗工作。
[0034]
2)依据车辆标志码id的不同,将数据集ω拆分成多个独立子集{ω1,ω2,
…
,ωm},即ω1∪ω2∪
…
∪ωm=ω,v≤m,同一个子集里面任意轨迹点和具有相同的车辆标志码id。
[0035]
3)对同一个子集内的所有轨迹点按定位时间t
id
进行升序排列,即满足满足
[0036]
3.本发明实施例提供了一种城市网格划分方法,本发明实施例的所述方法可以包括以下步骤:
[0037]
1)从文件nodecoordinate.shp读取道路网络所有节点坐标,并提取出最小和最大值,即x
min
,y
min
,x
max
,y
max
。
[0038]
2)启动arcgis的“创建渔网”功能,设定“输出要素类”为fishnet.shp,“模板范围”选为“与图层nodecoordinate.shp相同”,设定像元宽度w
gird
为0.002和像元高度h
gird
为0.002,点击“确定”,创建渔网fishnet.shp;
[0039]
3)任意节点p(x,y)∈n所处的网格索引为遍历n中所有的节点坐标,计算其属的网格,并统计每个网格grid[μ,γ]所包含的所有道路节点p
μ,γ
{p1,p2,
…
,p
θ
}。
[0040]
4.参见附图3,本发明实施例提供了一种浮动车辆轨迹地图匹配与轨迹点加密方法,本发明实施例的所述方法可以包括以下步骤:
[0041]
1)选取车辆id的轨迹集合,并截取一定时间范围内的轨迹序列
[0042]
2)遍历任意相邻的轨迹点对搜索距离p
k1
最近的n个最近的道路节点以及距离p
k2
最近的n个最近的道路节点
[0043]
3)计算起点集合(p1,p2,
…
,pn)与终点集合(p
′1,p
′2,
…
,p
′n)任意两个起止点之间的最短路径集合(p1,p2,
…
,pn×n)。
[0044]
4)选取(p1,p2,
…
,pn×n)中长度最短的路径p
shortest
插入到节点p
k1
和p
k2
之间。
[0045]
5)重复步骤2-4,直至ωu内所有的相邻轨迹点对都被处理。
[0046]
6)重复步骤1-5,直至ω内所有车辆都被处理。
[0047]
5.本发明实施例提供了一种基于城市海量车辆轨迹的移动感知能力测定方法,本发明实施例的所述方法可以包括以下步骤:
[0048]
1)统计包含道路节点的网格数量w,即初始化w=0,遍历所有的城市网格,对于任意网格grid[μ,γ],若其包含的所有道路节点|p
μ,γ
|》0,则w=w 1。
[0049]
2)初始化所有网格为“未访问状态”;从ω随机选取τ辆车的加密轨迹{ω1,ω2,
…
,ω
τ
},对于的任意轨迹点δ∈{ω1,ω2,
…
,ω
τ
},坐标为(x
δ
,y
δ
),计算其所属的网格标记网格[μ,γ]为“访问状态”;重复此步骤,直至{ω1,ω2,
…
,ω
τ
}内所有轨迹点都被处理;统计所有“访问状态”的网格,令其数量为w,则τ辆车的移动感知能力为
[0050]
3)更改车辆数量τ,重复步骤3,计算不同数量车辆的移动感知能力。
[0051]
以上所述的具体实施例,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。