技术特征:
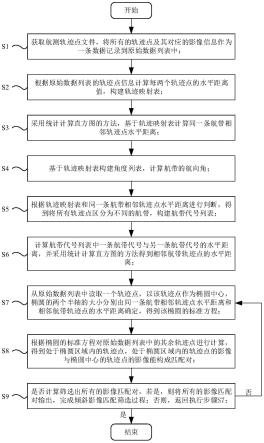
1.一种倾斜影像匹配筛选方法,其特征在于,包括以下步骤:s1:获取航测轨迹点文件,将所有的轨迹点及其对应的影像信息作为一条数据记录到原始数据列表中;s2:根据原始数据列表的轨迹点信息计算每两个轨迹点的水平距离值,构建轨迹映射表;s3:采用统计计算直方图的方法,基于轨迹映射表计算同一条航带相邻轨迹点水平距离;s4:基于轨迹映射表构建角度列表,计算航带的航向角;s5:根据轨迹映射表和同一条航带相邻轨迹点水平距离进行判断,将所有轨迹点区分为不同的航带,构建航带代号列表;s6:计算航带代号列表中一条航带代号与另一条航带代号的水平距离,并采用统计计算直方图的方法得到相邻航带轨迹点的水平距离;s7:从原始数据列表中读取一个轨迹点,以该轨迹点作为椭圆中心,椭圆的两个半轴的大小分别由同一条航带相邻轨迹点水平距离和相邻航带轨迹点的水平距离确定,得到该椭圆的标准方程;s8:根据椭圆的标准方程对原始数据列表中的其余轨迹点进行计算,得到处于椭圆区域内的轨迹点,处于椭圆区域内的轨迹点的影像与椭圆中心的轨迹点的影像能构成匹配对;s9:重复执行步骤s7-s8,直至计算筛选出所有的影像匹配对,将所有的影像匹配对输出,完成倾斜影像匹配筛选过程。2.根据权利要求1所述的一种倾斜影像匹配筛选方法,其特征在于,步骤s2具体包括以下子步骤:s21:从原始数据列表中逐一读取每两个轨迹点信息,计算每两个轨迹点的水平距离值;s22:设置距离阈值,判断每两个轨迹点的水平距离值是否大于设定的距离阈值,若是,则计算水平距离值对应的两个轨迹点的角度值;s23:对所有水平距离值和角度值向下取整后,将每两个轨迹点信息以及其对应的水平距离值、角度值作为一条记录,构建轨迹映射表。3.根据权利要求2所述的一种倾斜影像匹配筛选方法,其特征在于,步骤s3具体为:逐一读取轨迹映射表中记录的水平距离值,将相同的水平距离值的个数进行累加,得到一个距离直方图并将该距离直方图中个数最多的水平距离值作为同一条航带相邻轨迹点水平距离。4.根据权利要求3所述的一种倾斜影像匹配筛选方法,其特征在于,步骤s4具体包括以下子步骤:s41:逐一读取轨迹映射表中记录的水平距离值,判断每个水平距离值与同一条航带相邻轨迹点水平距离值的差值绝对值是否小于设定的阈值,若是,则将水平距离值对应的角度值记录到角度列表中;s42:逐一读取角度列表中记录的角度值,将相同角度值的个数进行累加,得到一个角度直方图并将该角度直方图中个数最多的角度作为航带的航向角。
5.根据权利要求4所述的一种倾斜影像匹配筛选方法,其特征在于,步骤s5具体包括以下子步骤:s51:逐一读取轨迹映射表中记录的水平距离值和角度值,若存在水平距离值与同一条航带相邻轨迹点水平距离值的差值绝对值少于设定的阈值并且该水平距离值对应的角度值与航带的航向角差值绝对值少于设定的阈值的两个轨迹点,则将这两个轨迹点判断为同一个航带;s52:构建航带代号列表,以轨迹点作为关键字在航带代号列表中查找,若存在,则将轨迹点记录到同一个航带代号列表的子项上,若不存在,则作为新代号记录到该航带代号列表中;s53:重复执行步骤s51-s52,直至将所有轨迹点区分为不同的航带,得到航带代号列表。6.根据权利要求5所述的一种倾斜影像匹配筛选方法,其特征在于,步骤s6具体包括以下子步骤:s61:逐一计算航带代号列表中每条航带代号与另一条航带代号的水平距离,即计算一条航带代号的每个轨迹点与另一条航带代号的每个轨迹点两两之间的水平距离值,将所有的水平距离值记录到距离列表中;s62:逐一读取距离列表中记录的水平距离值,将相同水平距离值的个数进行累加,得到一个航带水平距离直方图并将该航带水平距离直方图中个数最多的那个水平距离值作为相邻航带轨迹点的水平距离。7.根据权利要求6所述的一种倾斜影像匹配筛选方法,其特征在于,步骤s8具体包括以下步骤:s81:将原始数据列表中的其余轨迹点进行逆时针旋转,旋转角度为航带的航向角;s82:将旋转后的轨迹点坐标带入椭圆的标准方程中进行计算,其值少于1则代表该轨迹点处于椭圆区域内,处于椭圆区域内的轨迹点的影像与椭圆中心的轨迹点的影像能构成匹配对。8.一种倾斜影像匹配筛选系统,其特征在于,用于实现如权利要求1~7任一项权利要求所述的一种倾斜影像匹配筛选方法,具体包括原始数据获取模块、轨迹映射表构建模块、相邻轨迹点水平距离计算模块、航向角计算模块、航带代号列表构建模块、相邻航带轨迹点水平距离计算模块、椭圆标准方程建立模块、影像匹配模块、循环判断模块和结果输出模块;其中:所述原始数据获取模块用于获取航测轨迹点文件,将所有的轨迹点及其对应的影像信息作为一条数据记录到原始数据列表中;所述轨迹映射表构建模块用于根据原始数据列表的轨迹点信息计算每两个轨迹点的水平距离值,构建轨迹映射表;所述相邻轨迹点水平距离计算模块用于采用统计计算直方图的方法,基于轨迹映射表计算同一条航带相邻轨迹点水平距离;所述航向角计算模块用于基于轨迹映射表构建角度列表,计算航带的航向角;所述航带代号列表构建模块用于据轨迹映射表和同一条航带相邻轨迹点水平距离进行判断,将所有轨迹点区分为不同的航带,构建航带代号列表;
所述相邻航带轨迹点水平距离计算模块用于计算航带代号列表中一条航带代号与另一条航带代号的水平距离,并采用统计计算直方图的方法得到相邻航带轨迹点的水平距离;所述椭圆标准方程建立模块用于从原始数据列表中读取一个轨迹点,以该轨迹点作为椭圆中心,椭圆的两个半轴的大小分别由同一条航带相邻轨迹点水平距离和相邻航带轨迹点的水平距离确定,建立椭圆的标准方程;所述影像匹配模块用于根据椭圆的标准方程对原始数据列表中的其余轨迹点进行计算,得到处于椭圆区域内的轨迹点,处于椭圆区域内的轨迹点的影像与椭圆中心的轨迹点的影像能构成匹配对;所述循环判断模块用于判断是否已经完成所有影像匹配对的筛选,若是,则由结果输出模块将所有的影像匹配对输出,完成倾斜影像匹配筛选过程;否则,由椭圆标准方程建立模块重新选择轨迹点,继续进行影像匹配筛选。9.根据权利要求8所述的一种倾斜影像匹配筛选系统,其特征在于,在所述轨迹映射表构建模块中,具体执行以下过程:从原始数据列表中逐一读取每两个轨迹点信息,计算每两个轨迹点的水平距离值;设置距离阈值,判断每两个轨迹点的水平距离值是否大于设定的距离阈值,若是,则计算水平距离值对应的两个轨迹点的角度值;对所有水平距离值和角度值向下取整后,将每两个轨迹点信息以及其对应的水平距离值、角度值作为一条记录,构建轨迹映射表;在所述相邻轨迹点水平距离计算模块中,具体执行以下过程,逐一读取轨迹映射表中记录的水平距离值,将相同的水平距离值的个数进行累加,得到一个距离直方图并将该距离直方图中个数最多的水平距离值作为同一条航带相邻轨迹点水平距离;在所述航向角计算模块中,具体执行以下过程:逐一读取轨迹映射表中记录的水平距离值,判断每个水平距离值与同一条航带相邻轨迹点水平距离值的差值绝对值是否小于设定的阈值,若是,则将水平距离值对应的角度值记录到角度列表中;逐一读取角度列表中记录的角度值,将相同角度值的个数进行累加,得到一个角度直方图并将该角度直方图中个数最多的角度作为航带的航向角。10.根据权利要求9所述的一种倾斜影像匹配筛选系统,其特征在于,在所述航带代号列表构建模块中,具体执行以下过程:逐一读取轨迹映射表中记录的水平距离值和角度值,若存在水平距离值与同一条航带相邻轨迹点水平距离值的差值绝对值少于设定的阈值并且该水平距离值对应的角度值与航带的航向角差值绝对值少于设定的阈值的两个轨迹点,则将这两个轨迹点判断为同一个航带;构建航带代号列表,以轨迹点作为关键字在航带代号列表中查找,若存在,则将轨迹点记录到同一个航带代号列表的子项上,若不存在,则作为新代号记录到该航带代号列表中;重复上述操作,直至将所有轨迹点区分为不同的航带,得到航带代号列表;在所述相邻航带轨迹点水平距离计算模块中,具体执行以下过程:逐一计算航带代号列表中每条航带代号与另一条航带代号的水平距离,即计算一条航带代号的每个轨迹点与另一条航带代号的每个轨迹点两两之间的水平距离值,将所有的水平距离值记录到距离列表中;逐一读取距离列表中记录的水平距离值,将相同水平距离值的个数进行累加,得到一个航带水平距离直方图并将该航带水平距离直方图中个数最多的那个水平距离值作为相
邻航带轨迹点的水平距离;在所述影像匹配模块中,具体执行以下过程:将原始数据列表中的其余轨迹点进行逆时针旋转,旋转角度为航带的航向角;将旋转后的轨迹点坐标带入椭圆的标准方程中进行计算,其值少于1则代表该轨迹点处于椭圆区域内,处于椭圆区域内的轨迹点的影像与椭圆中心的轨迹点的影像能构成匹配对。
技术总结
本发明提出了一种倾斜影像匹配筛选方法,涉及航测技术领域,通过计算确定同一条航带相邻轨迹点水平距离和相邻航带轨迹点的水平距离,以一个轨迹点作为椭圆中心,通过同一条航带相邻轨迹点水平距离和相邻航带轨迹点的水平距离分别确定椭圆半轴,构建椭圆的标准方程;通过判断其余轨迹点与椭圆的位置关系进行影像匹配筛选,若轨迹点处于椭圆区域内,则该轨迹点的影像与椭圆中心的轨迹点的影像能构成匹配对。本发明还提出了一种倾斜影像匹配筛选系统,利用椭圆区域进行筛选,其他影像若在此椭圆区域内就与当前影像构成匹配对,实现对倾斜影像进行匹配的筛选,筛选后可以有效减少影像匹配对的数量,减少后期影像匹配处理时长。长。长。
技术研发人员:黄伟健 闫志愿 丁永祥 闫少霞
受保护的技术使用者:广州南方卫星导航仪器有限公司
技术研发日:2022.04.08
技术公布日:2022/8/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。