技术特征:
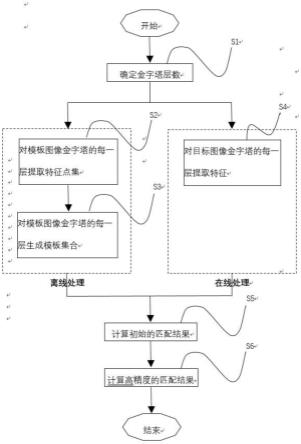
1.一种基于局部极大值的高精度模板匹配方法,其特征在于:包括步骤:s1、确定金字塔的层数,分别对模板图像和目标图像进行图像金字塔分层;s2、对模板图像金字塔的每一层提取特征点集,即对每一层生成初始模板;s3、对模板图像金字塔的每一层生成模板集合;s4、对目标图像金字塔的每一层提取特征;s5、计算初始的匹配结果;s6、计算高精度的匹配结果。2.根据权利要求1所述的一种基于局部极大值的高精度模板匹配方法,其特征在于:步骤s2所述的对模板图像金字塔的每一层生成初始模板,包括如下步骤:s2.1、图像预处理;s2.2、对图像进行边缘检测、计算每个像素点的边缘强度;s2.3、遍历所有的像素点,将满足如下条件的像素点及对应的单位方向向量放入特征点集;s2.31、该点的边缘强度大于一定阈值;s2.32、该点的边缘强度在以其为中心的邻域内是局部极大值。3.根据权利要求1所述的一种基于局部极大值的高精度模板匹配方法,其特征在于:步骤s3所述的对模板图像金字塔的每一层生成模板集合,包括如下步骤:s3.1、设定角度范围、缩放范围以及旋转步长、缩放步长;s3.2、以模板图像金字塔每一层的中心为原点,对步骤s2得到的初始模板进行旋转、缩放操作,生成对应各种角度及尺度的模板。4.根据权利要求1所述的一种基于局部极大值的高精度模板匹配方法,其特征在于:步骤s4所述的对目标图像金字塔的每一层提取特征,包括如下步骤:s4.1、图像预处理;s4.2、对图像进行边缘检测,对每个像素点计算单位方向向量。5.根据权利要求1所述的一种基于局部极大值的高精度模板匹配方法,其特征在于:步骤s5所述的计算初始的匹配结果是将所有的模板逐一与目标图像进行匹配、计算相似度,并利用图像金字塔搜索的方式,由粗到精地得到初始的旋转角度、缩放尺度以及像素级的匹配坐标。6.根据权利要求5所述的一种基于局部极大值的高精度模板匹配方法,其特征在于:所述计算相似度的方法为计算模板中所有点的单位方向向量与目标图像中相应点处的单位方向向量的点积的平均值。7.根据权利要求1所述的一种基于局部极大值的高精度模板匹配方法,其特征在于:步骤s6所述的计算高精度的匹配结果包括计算高精度的旋转角度、缩放尺度以及匹配坐标。8.根据权利要求7所述的一种基于局部极大值的高精度模板匹配方法,其特征在于:所述高精度的旋转角度、缩放尺度分别对模板图像和目标图像的匹配区域进行边缘检测、然后提取包围所有边缘点的最小外接矩形,通过最小外接矩形的角度、宽度、高度得到高精度的旋转角度及缩放尺度。9.根据权利要求7所述的一种基于局部极大值的高精度模板匹配方法,其特征在于:高精度的匹配坐标以初始的匹配坐标为中心的邻域内、分别计算相应的匹配误差,然后通过
曲面拟合、求拟合曲面的极值点得到亚像素级的匹配坐标。
技术总结
本发明属于图像定位及机器视觉技术领域,且公开了一种基于局部极大值的高精度模板匹配方法,包括步骤:S1、确定金字塔的层数,分别对模板图像和目标图像进行图像金字塔分层;S2、对模板图像金字塔的每一层提取特征点集,即对每一层生成初始模板。本发明通过计算初始的匹配结果时,仅利用了少量的边缘强度极大值点,因而降低了运算量,能够满足实时性的要求;利用了边缘强度局部极大值点显著可靠的特点,能够克服对比度低、光照变化、复杂背景等干扰,因而具有较强的鲁棒性;通过对目标图像的匹配区域进行边缘检测及距离变换,利用曲面拟合的方法可以得到更高精度的匹配结果,能够满足高精度定位的要求。精度定位的要求。精度定位的要求。
技术研发人员:肖振 陈红光 卢兴中
受保护的技术使用者:上海贝特威自动化科技有限公司
技术研发日:2022.05.14
技术公布日:2022/8/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。