1.本发明属于电机控制领域,具体涉及一种用于电力闭环加载控制的补偿系统。
背景技术:
2.加载器(测功机)是一种为电机动力系统提供转矩的装置,可以用来测试电机带载时性能的优劣。在数控机床、洗衣机、电动汽车等由电机提供动力的产品中,实际使用时内部电机会承受各种类型的负载;在其出厂检测中,可以使用加载器模拟实际负载对其进行加载测试,根据具体性能采取准许出厂或继续改进等决策。
3.下面介绍几种传统且应用十分广泛的加载器。
4.(1)电涡流加载器
5.电涡流加载器通过感应盘的运动产生电涡流,随后电涡流又会产生的磁场,并与气隙磁场相互作用,从而产生转矩以达到加载的目的。电涡流加载器具有结构简单、操作方便、测试精度高、稳定性好、使用寿命长等优点。但是该加载器内部结构相对复杂,维护困难。
6.(2)磁粉加载器
7.磁粉加载器根据电磁原理和利用磁粉传递力矩,其制动力矩与励磁电流基本成正比关系,调节励磁电流大小,可达到无级控制。这种加载器结构简单,使用方便,准确度高,但不宜较长时间运行,避免因发热产生高温而使磁粉烧结,降低使用寿命,工作时应通水强制冷却。这种加载方式对测验中、小型电动机转矩十分合适。
8.(3)磁滞加载器
9.磁滞加载器通过磁滞转子杯在气隙内旋转时被脉动磁场反复磁化,从而产生磁滞损耗,形成同转子旋转方向相反的阻转矩,即制动转矩,以达到加载的目的。磁滞加载器结构简单、转子惯量小,无电刷滑环或整流子的摩擦损耗,高速性能好、测试稳定。但是该加载器在功率较大时,辅助设备较繁琐且精度较低。
10.近年来,随着电机做工的日益精良以及电机控制理论的日益成熟,基于电机的电力加载器逐渐流行起来。该加载器具有发热量低,操作方便,使用方便,运行成本低等优点。最重要的是,该加载器加载特性非常好,几乎可以从零开始加载,无论是高转速还是低转速(极低转速甚至是零转速下)都能进行稳定加载,而且其加载稳定性是以往任何加载设备所不能比拟的。
11.作为电力加载器的一种,表贴式永磁同步电机(surface-mounted permanent magnetic synchronous motor,spmsm)由于具有结构简单、功率密度大、转矩惯量比高、动态性能好等优点,并且随着稀土、铁氧体等永磁材料价格的降低以及性能的提高,其在加载系统中的应用也越来越广泛。
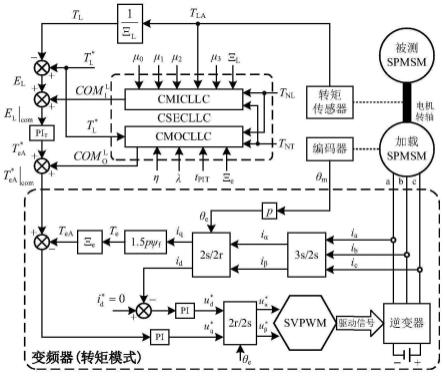
12.图1为应用较为广泛的基于spmsm的传统电力闭环加载控制系统框图。变频器处于转矩控制模式,采用矢量控制。pi
t
为闭环加载pi控制器,控制目标是让负载转矩值t
l
跟随负载转矩值给定值pi
t
的输入为e
l
,输出为即电磁转矩模拟电压值t
ea
的给定值。输
出给变频器,经过坐标变换、pi调节、svpwm等一系列操作后输出驱动信号给逆变器,从而控制加载spmsm。
13.但是,实际情况中被测电机的负载波形多种多样。例如,当波形为高频正弦波或三角波时,上述控制系统的跟随性能将会大大降低,不适合军工、航天等一些对加载精度要求较高的场合。
技术实现要素:
14.针对现有技术所存在的上述技术缺陷,本发明提供了一种用于电力闭环加载控制的补偿系统(compensatory system for electrical closed-loop loading control,csecllc)。该方法能有效提高传统电力闭环加载控制系统在复杂给定信号下的跟随性能。
15.本发明提出的用于电力闭环加载控制的补偿系统(csecllc),包括:闭环加载控制器输入补偿模块(cmicllc)与闭环加载控制器输出补偿模块(cmocllc)。
16.所述闭环加载控制器输入补偿模块对负载转矩模拟电压值t
la
进行采样,同时结合由负载转矩采样滞后比重约束条件给出的负载转矩无滞后比重μ0、负载转矩一阶滞后比重μ1、负载转矩二阶滞后比重μ2、负载转矩三阶滞后比重μ3,计算出闭环加载控制器输入补偿量初值comi;基于闭环加载控制器输入补偿限幅函数limi(.),结合加载电机额定转矩t
nl
、被测电机额定转矩t
nt
、负载转矩模拟电压值与实际值之比ξ
l
,对闭环加载控制器输入补偿量初值comi进行限幅得到闭环加载控制器输入补偿量实现对闭环加载控制器输入量e
l
的补偿;
17.所述闭环加载控制器输出补偿模块对负载转矩给定值进行采样,基于负载转矩给定值微分比重约束条件给出负载转矩给定值比重η、负载转矩给定值一阶微分比重λ,同时结合闭环加载控制器采样周期t
pit
,计算出闭环加载控制器输出补偿量初值como;基于闭环加载控制器输出补偿限幅函数limo(.),结合加载电机额定转矩t
nl
、被测电机额定转矩t
nt
、电磁转矩模拟电压值与实际值之比ξe,对como进行限幅得到闭环加载控制器输出补偿量实现对闭环加载控制器输出量,即电磁转矩模拟电压值t
ea
的给定值的补偿。
18.与现有技术相比,本发明的有益效果为:
19.(1)本发明中的闭环加载控制器输入补偿模块(cmicllc),能有效降低负载转矩采样误差,提高系统运行的稳定性。
20.(2)本发明中的闭环加载控制器输出补偿模块(cmocllc),能有效提高复杂给定信号下系统的跟随性能。
附图说明
21.图1是基于spmsm的传统电力闭环加载控制系统框图;
22.图2为本发明的csecllc系统框图;
23.图3为电机加方波负载时负载转矩波形(周期为2s);
24.图4为电机加方波负载时负载转矩波形(周期为1s);
25.图5为电机加正弦波负载时负载转矩波形(周期为2s);
26.图6为电机加正弦波负载时负载转矩波形(周期为1s);
27.图7为电机加三角波负载时负载转矩波形(周期为2s);
28.图8为电机加三角波负载时负载转矩波形(周期为1s)。
具体实施方式
29.下面结合具体实施方式对本发明做进一步阐述和说明。所述实施例仅是本公开内容的示范且不圈定限制范围。本发明中各个实施方式的技术特征在没有相互冲突的前提下,均可进行相应组合。
30.如图2所示,本发明的csecllc系统包括闭环加载控制器输入补偿模块(cmicllc)与闭环加载控制器输出补偿模块(cmocllc)。
31.其中,闭环加载控制器输入补偿模块对负载转矩模拟电压值t
la
进行采样,同时结合由负载转矩采样滞后比重约束条件给出的负载转矩无滞后比重μ0、负载转矩一阶滞后比重μ1、负载转矩二阶滞后比重μ2、负载转矩三阶滞后比重μ3,计算出闭环加载控制器输入补偿量初值comi;基于闭环加载控制器输入补偿限幅函数limi(.),结合加载电机额定转矩t
nl
、被测电机额定转矩t
nt
、负载转矩模拟电压值与实际值之比ξ
l
,对闭环加载控制器输入补偿量初值comi进行限幅得到闭环加载控制器输入补偿量实现对闭环加载控制器输入量e
l
的补偿;
32.具体的,cmicllc的目的是为了更好地降低采样误差,在cmicllc中,首先对t
la
进行采样,同时结合μ0、μ1、μ2、μ3可计算出闭环加载控制器输入补偿量初值comi为
33.comi=(μ
0-1)t
la
(k) μ1t
la
(k-1) μ2t
la
(k-2) μ3t
la
(k-3)
34.其中,t
la
(k)为t
la
的当前采样值,t
la
(k-1)为t
la
的一阶滞后采样值,t
la
(k-2)为t
la
的二阶滞后采样值,t
la
(k-3)为t
la
的三阶滞后采样值。μ0、μ1、μ2、μ3的取值应满足如下负载转矩采样滞后比重约束条件
[0035][0036]
基于闭环加载控制器输入补偿限幅函数limi(.),结合t
nl
、t
nt
、ξ
l
,对comi进行限幅,得到闭环加载控制器输入补偿量
[0037][0038]
cmocllc的主要目的是为了提高系统对复杂给定信号的跟随性能。在cmocllc中,首先对进行采样,同时结合η、λ、t
pit
可计算出闭环加载控制器输出补偿量初值como为
[0039]
[0040]
其中,为的当前采样值,为的一阶滞后采样值。η、λ的取值应满足如下负载转矩给定值微分比重约束条件
[0041][0042]
基于闭环加载控制器输出补偿限幅函数limo(.),结合t
nl
、t
nt
、ξe,对como进行限幅,得到闭环加载控制器输出补偿量
[0043][0044]
最终,csecllc的系统框图如图2所示。e
l
|
com
为e
l
受补偿后的值,为受补偿后的值。当系统工作时,cmicllc对t
la
进行采样,同时结合由负载转矩采样滞后比重约束条件给出的μ0、μ1、μ2、μ3,计算出闭环加载控制器输入补偿量初值comi;基于闭环加载控制器输入补偿限幅函数limi(.),结合t
nl
、t
nt
、ξ
l
,对comi进行限幅得到闭环加载控制器输入补偿量实现对闭环加载控制器输入量e
l
的补偿。cmocllc对进行采样,基于负载转矩给定值微分比重约束条件给出η、λ,同时结合t
pit
,计算出闭环加载控制器输出补偿量初值como;基于闭环加载控制器输出补偿限幅函数limo(.),结合t
nl
、t
nt
、ξe,对como进行限幅得到闭环加载控制器输出补偿量实现对闭环加载控制器输出量,即电磁转矩模拟电压值t
ea
的给定值的补偿。
[0045]
本发明进一步搭建了电力闭环加载控制实验平台,主控模块采用speedgoat控制器。加载电机与被测电机参数分别如表1和表2所示。
[0046]
表1加载spmsm参数
[0047][0048][0049]
表2被测spmsm参数
[0050]
参数数值额定电压un92v额定电流in1.7a额定功率pn200w额定转速nn3000rpm额定转矩t
nt
640n
·
mm转动惯量j1.61
×
10-5
kg
·
m2定子电阻rs4.20ω定子电感ls6.99mh永磁体磁链ψf0.0412wb极对数p5
[0051]
这里在加载波形为2s和1s周期的方波、正弦波和三角波时,分别给出未加和加入cseclc两种闭环算法控制下负载转矩给定量与实际量的波形如图3-8所示。可以看出,加入本发明的csecllc后,负载转矩的动态响应速度和控制精度明显提高。
[0052]
表3给出了未加和加入cseclc两种闭环算法控制下负载转矩的相移率和控制误差两大跟随性能指标的具体数值。在2s和1s的方波周期时,加入本发明的csecllc后,产生的相移率分别降低88.8%和89.7%,控制误差分别降低62.5%和68.6%;在2s和1s的正弦波周期时,加入csecllc后,产生的相移率分别降低77.8%和83.7%,控制误差分别降低72.9%和76.9%;在2s和1s的三角波周期时,加入csecllc后,产生的相移率分别降低81.8%和86.4%,控制误差分别降低70.7%和74.1%。加入csecllc后,跟随性能得到极大提升。
[0053]
表3未加和加入csecllc时负载转矩跟随性能指标数值
[0054][0055]
注:
[0056]
由此可见,本发明提出的用于电力闭环加载控制的补偿系统能有效降低负载转矩采样误差,同时能显著提高系统在复杂给定信号下的跟随性能。
[0057]
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并
不能因此而理解为对本发明专利范围的限制。对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
