1.本实用新型涉及跳绳计数技术领域,具体涉及一种可靠跳绳计数装置。
背景技术:
2.市场竞争激烈,需要产品功能优越且成本低廉。跳绳产品作为大众产品,更是要求物美价廉。目前自动计数跳绳产品采用各种传感器感应转轴转动圈数进行计数,其根本原理都是通过传感器感应转轴上镶嵌的感应目标物实现,典型的技术就是霍尔传感器感应磁铁。市场产品根据市场定位不同有一个霍尔传感器、两个霍尔传感器和三个霍尔传感器的方案。但真正做到比较精准计数的还是三个霍尔传感器的方案,因为这个方案可以避免大部分误计。但是三霍尔方案成本更高,除了增加一个传感器外,还要增加立体部署传感器的结构费用。
技术实现要素:
3.本实用新型的目的在于提供一种可靠跳绳计数装置,其基于两个霍尔传感器同样实现三霍尔效果的方案,达到相同效果的前提下节约了成本和生产工艺复杂度。为实现上述目的,本实用新型提供如下技术方案:
4.一种可靠跳绳计数装置,包括转轴、转盘、磁铁和两个霍尔传感器,所述转轴设置在转盘一端面,所述磁铁设置在转盘的另一端面,所述两个霍尔传感器以转盘的纵向圆心线对称设置并与磁铁对应,所述两个霍尔传感器高于所述转盘的圆心。
5.进一步地,所述两个霍尔传感器之间的距离为霍尔传感器与磁铁的感应距离r(即霍尔传感器的感应半径)。
6.进一步地,所述磁铁与转盘圆心的距离为sqrt(2)*r。
7.进一步地,所述两个霍尔传感器与转盘中心的垂直高度为0.5*r。
8.进一步地,所述转轴与转盘轴心线重合。
9.进一步地,所述可靠跳绳计数装置还包括pcb板,所述两个霍尔传感器贴装在pcb板上。
10.与现有技术相比,本实用新型的有益效果是:
11.本实用新型解决了双霍尔实现三霍尔一样的计数精度效果以及正反转区分能力,并且和三霍尔方案相比节约了电路成本,降低了结构复杂度。
附图说明
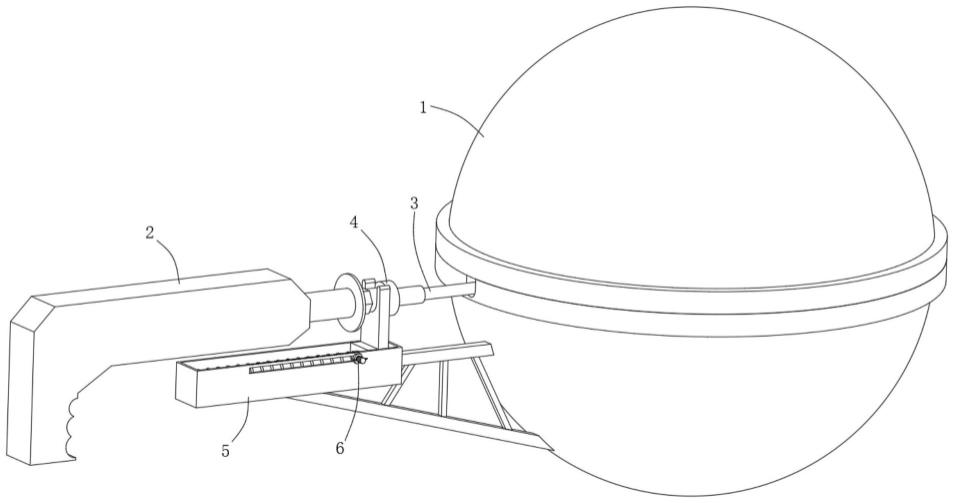
12.图1为本实用新型提供的一种可靠跳绳计数装置的结构示意图;
13.图2为本实用新型提供的一种可靠跳绳计数装置的证明示意图。
14.附图标记:1-转盘;2-磁铁;3-第一霍尔传感器;4-第二霍尔传感器;5-转轴;6-pcb板;7-第一虚线圆;8-第二虚线圆。
具体实施方式
15.下面将结合实施例,对本实用新型的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域技术人员在没有付出创造性劳动的前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
16.在本实用新型的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或部件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制;术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性,此外,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个部件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
17.实施例1
18.如图1-2所示,一种可靠跳绳计数装置,包括转轴5、转盘1、磁铁2和第一霍尔传感器3和第二霍尔传感器4,所述转轴5设置在转盘1一端面,所述磁铁2设置在转盘1的另一端面,所述第一霍尔传感器3和第二霍尔传感器4以转盘1的纵向圆心线对称设置并与磁铁2对应,所述第一霍尔传感器3和第二霍尔传感器4高于所述转盘1的圆心。
19.在本实施例中,所述第一霍尔传感器3和第二霍尔传感器4之间的距离为霍尔传感器与磁铁2的感应距离r(即霍尔传感器的感应半径,具体为,霍尔传感器可被磁铁2磁场触发输出有效电平的最远距离),对于不同型号的霍尔传感器与磁铁的感应距离是已知的,可根据产品的说明书得到,如霍尔传感器会给出磁特性参数(比如磁感应强度为30高斯时输出有效电平),磁铁也会有磁特性参数(比如表面磁场3050~3700高斯);另外,两者实际感应距离r也可通过实际测试得到样本感应距离。所述磁铁2与转盘1圆心的距离r为sqrt(2)*r。所述第一霍尔传感器3和第二霍尔传感器4与转盘1中心的垂直高度h为0.5*r。
20.在本实施例中,所述转轴5与转盘1轴心线重合;所述可靠跳绳计数装置还包括pcb板6,所述第一霍尔传感器3和第二霍尔传感器4贴装在pcb板6上。
21.我们已知霍尔传感器和磁铁的感应距离为r,假设磁铁2的转动半径为r,如2所示,我们需要整个转动周期内出现的状态有:00、01、10、11四种。
22.四种状态每种状态占据90
°
分区,分别是(假设第一霍尔传感器3为状态高位,霍尔传感器感应到磁铁输出1,未感应到输出0):
23.——状态00占据分区
⑥⑦
;
24.——状态01占据分区
①⑧
;
25.——状态10占据分区
④⑤
;
26.——状态11占据分区
②③
。
27.在磁铁和霍尔传感器感应距离为r的情况下要实现以上情况,则要求:
28.——磁铁2在位置a时,逆时针行进一点不能被第二霍尔传感器4感应到,顺时针行进一点可以被第二霍尔传感器4感应到;
29.——磁铁2在位置b时,逆时针行进一点不能被第一霍尔传感器3感应到,顺时针行进一点可以被第一霍尔传感器3感应到。
30.位置c和位置d时依次类推。
31.如图2中以第一霍尔传感器3为圆心的第一虚线圆7就是第一霍尔传感器3感应范围,以第二霍尔传感器4为圆心的第二虚线圆8就是第二霍尔传感器4感应范围;可见图2就是理论上的最佳几何布局,可以达到最佳状态输出。
32.为达到以上最佳效果,已知霍尔传感器和磁铁的感应距离为r,根据图2几何关系,可以计算得出磁铁2与转盘1圆心距离r应该为sqrt(2)*r,而第一霍尔传感器3和第二霍尔传感器4贴片的pcb板面与转盘1圆心的垂直高度h应该为0.5*r。
33.按如上方案设计,可以实现正反转识别(假设第一霍尔传感器为状态高位):
34.——顺时针转动时状态输出为:
……‑
》00-》10-》11-》01-》00-》10-》11-》
……
;
35.——逆时针转动时状态输出为:
……‑
》00-》01-》11-》10-》00-》01-》11-》
……
。
36.可见顺时针和逆时针的状态迁移是不一样的,可以达到和三霍尔传感器一样的识别和记圈效果。
37.并且不需要像三霍尔传感器一样立体布局传感器,带来结构和电路上的复杂度。
38.此方案从原理上解决了双霍尔传感器实现三霍尔传感器一样的计数精度效果以及正反转区分能力,并且和三霍尔传感器方案相比节约了电路成本,降低了结构复杂度。
39.应该注意的是上述实施例对本实用新型进行说明而不是对本实用新型进行限制,并且本领域技术人员在不脱离所附权利要求的范围的情况下可设计出替换实施例。在权利要求中,不应将位于括号之间的任何参考符号构造成对权利要求的限制。单词“包含”不排除存在未列在权利要求中的部件。位于部件之前的单词“一”或“一个”不排除存在多个这样的部件。
40.以上所述的,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。