1.本发明属于电力设施技术领域,具体涉及一种断路器抓取拖拽机构。
背景技术:
2.断路器是指能够关合、承载和开断正常回路条件下的电流并能在规定的时间内关合、承载和开断异常回路条件下的电流的开关装置。
3.手车式断路器尺寸大,重量大,传统人工推拉移动的更换方式,劳动强度大,费时费力。
技术实现要素:
4.本发明实施例提供一种断路器抓取拖拽机构,旨在降低断路器更换时人工的劳动强度,提高工作效率。
5.为实现上述目的,本发明采用的技术方案是:提供一种断路器抓取拖拽机构,包括:滑板、线性驱动组件、滑动连接板以及两组抓手组件,线性驱动组件装配于所述滑板上;滑动连接板连接于所述线性驱动组件上;两组抓手组件对称设置于所述滑动连接板上;所述线性驱动组件驱动所述滑动连接板向前移动,使所述抓手组件的抓手抓取断路器上的拉手,并向后移动将所述断路器从配电柜内拖出。
6.在一种可能的实现方式中,所述抓手组件包括所述抓手、转轴和抓取气缸,所述抓手装配于所述转轴上,所述转轴的两端通过轴承座装配于所述滑动连接板上,所述抓取气缸的缸体铰接于所述滑动连接板上,所述抓取气缸的伸缩杆铰接于装配在所述转轴上的拐臂上;所述抓取气缸的伸缩杆向前伸出,驱动所述转轴带动所述抓手向下翻转,抓取所述拉手。
7.在一种可能的实现方式中,所述抓手组件还包括调节气缸及滑动装配于所述转轴上的滑块,所述抓手固定于所述滑块上,所述调节气缸的缸体固定于所述抓手上,所述调节气缸的伸缩杆与所述拐臂连接;所述转轴具有可防止所述滑块自转的防转结构。
8.在一种可能的实现方式中,所述调节气缸的伸缩杆与所述拐臂通过浮动接头相连。
9.在一种可能的实现方式中,所述防转结构为设置于所述转轴上的防转平面。
10.在一种可能的实现方式中,所述拐臂包括装配于所述转轴的轴套、以及径向连接于所述轴套上的外支臂和内支臂,所述外支臂与所述内支臂轴向错位设置,所述抓取气缸的伸缩杆铰接于所述外支臂上,所述调节气缸的伸缩杆连接于所述内支臂上。
11.在一种可能的实现方式中,所述断路器抓取拖拽机构还包括切换操作组件,所述切换操作组件设置于所述滑动连接板上,且位于两组所述抓手组件的中间;所述切换操作组件包括旋拧电机、套筒组件、推杆、导轨及滑座,所述导轨固定于所述滑动连接板上,所述滑座于导轨滑动配合,所述旋拧电机固定于所述滑座上,所述套筒组件组装于所述旋拧电机的主轴上,所述推杆连接于所述滑座上。
12.在一种可能的实现方式中,所述断路器抓取拖拽机构还包括定位组件,所述定位组件设置于所述滑板的前端两侧,所述定位组件包括设置于滑板前端的支座以及固定于所述支座上的定位销,所述定位销用于与配电柜上的定位孔插接。
13.在一种可能的实现方式中,所述断路器抓取拖拽机构还包括锁止组件,所述锁止组件设置于所述滑板的前端中间位置,所述锁止组件包括导向板、折弯板、锁钩和弹簧,所述导向板和所述折弯板连接于所述滑板的前端,所述锁钩通过销轴铰接于所述折弯板上,并向后穿过所述导向板上的导向孔,所述弹簧连接于所述锁钩与固定于所述滑板上的耳座之间,所述锁钩用于与配电柜上的锁孔锁止。
14.在一种可能的实现方式中,所述滑板的左右两侧分别设有用于支撑所述断路器的支撑座。
15.本发明提供的断路器抓取拖拽机构,与现有技术相比,有益效果在于:利用线性驱动组件驱动抓手组件向前移动,利用抓手组件抓牢断路器的拉手,再在线性驱动组件的驱动下向后移动,即可将断路器从配电柜内拖出。利用本实施例提供的断路器抓取拖拽机构,在断路器更换或维修时,可以利用动力将柜体内的断路器拖出,并将维修后或新的断路器推入柜体内,实现断路器的自动拖出或推入,大大降低了人工劳动强度,减轻了作业人员的劳动负担,提高了工作效率。
附图说明
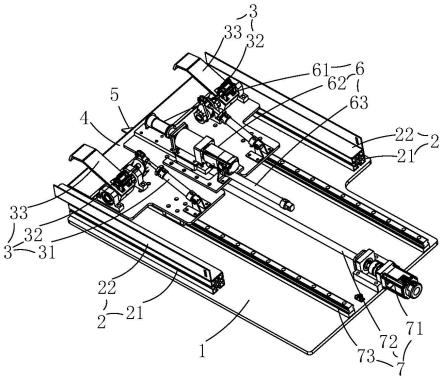
16.图1为本发明实施例提供的断路器抓取拖拽机构的结构示意图一;
17.图2为本发明实施例提供的断路器抓取拖拽机构的结构示意图二;
18.图3为本发明实施例提供的断路器抓取拖拽机构的结构示意图三;
19.图4为本发明实施例提供的抓手组件的结构示意图一;
20.图5为本发明实施例提供的抓手组件的结构示意图二;
21.图6为本发明实施例提供的抓手组件的结构示意图三;
22.图7为本发明实施例提供的切换操作组件的结构示意图;
23.图8为本发明实施例提供的锁止组件的结构示意图;
24.图9为本发明实施例提供的断路器抓取拖拽机构使用状态的结构示意图;
25.附图标记说明:
26.1、滑板;2、支撑座;21、型钢;22、角钢;3、抓手组件;31、抓取气缸;32、调节气缸;33、抓手;34、加强板;35、转轴;36、轴承座;37、拐臂;38、张紧套;39、滑块;4、滑动连接板;5、锁止组件;51、耳座;52、弹簧;53、锁钩;54、销轴;6、切换操作组件;61、套筒组件;62、旋拧电机;63、推杆;64、导轨;65、滑座;7、线性驱动组件;71、驱动电机;72、丝杆;73、滑轨;8、定位组件;81、支座;82、定位销;9、折弯板;91、限位孔;10、导向板;101、导向孔;11、断路器;111、拉手;112、操作孔。
具体实施方式
27.为了使本发明所要解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
28.在本发明的描述中,需要说明的是,若出现“前”、“后”、“左”、“右”等指示方位或位置关系的术语,断路器拖出操作时的位置关系,向着断路器方向为前,背离断路器方向为后,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
29.请一并参阅图1至图6,现对本发明提供的断路器抓取拖拽机构进行说明。所述断路器抓取拖拽机构,包括滑板1、线性驱动组件7、滑动连接板4以及两组抓手组件3,线性驱动组件7装配于滑板1上;滑动连接板4连接于线性驱动组件7上;两组抓手组件3对称设置于滑动连接板4上;线性驱动组件7驱动滑动连接板4向前移动,使抓手组件3的抓手33抓取断路器11上的拉手111,并向后移动将断路器11从配电柜内拖出。
30.本实施例提供的断路器11抓取拖拽机构,与现有技术相比,利用线性驱动组件7驱动抓手组件3向前移动,利用抓手组件3抓牢断路器11的拉手111,再在线性驱动组件7的驱动下向后移动,即可将断路器11从配电柜内拖出。
31.利用本实施例提供的断路器11抓取拖拽机构,在断路器11更换或维修时,可以利用动力将柜体内的断路器11拖出,并将维修后或新的断路器11推入柜体内,实现断路器11的自动拖出或推入,大大降低了人工劳动强度,减轻了作业人员的劳动负担,提高了工作效率。
32.参见图9所示,在具体更换断路器11的作业过程中,将本实施例提供的断路器11抓取拖拽机构装配在三维移动平台上,通过三维移动平台的xyz向位置调节,可实现抓取拖拽机构精准的处于断路器11待更换位置,各位置调节通过自动控制即可实现,也无需人工手动操作,省时省力。
33.本实施例提供的线性驱动组件7,可选地,线性驱动组件7为丝杆72驱动方式,具体包括驱动电机71、与驱动电机71连接的丝杆72、与丝杆72螺接的丝母、及分设于丝杆72左右两侧的滑轨73,滑轨73固定在滑板1上,驱动电机71固定在滑板1上,滑动连接板4的下表面固定于丝母上,且滑动连接板4的下表面左右两侧固定于滑轨73上。驱动电机71驱动丝杆72转动,转化为丝母的直线移动,从而带动滑板1沿滑轨73往复移动,实现抓手组件3向前靠近断路器11,并在抓取断路器11后向后将断路器11拖出。
34.在一些实施例中,线性驱动组件7还可以为电动推杆63、电动滑台及气缸驱动等其他的能够实现线性移动的机构。
35.本实施例提供的断路器11抓取拖拽机构的一种具体实施方式,参见图1至图6所示,抓手组件3包括抓手33、转轴35和抓取气缸31,抓手33装配于转轴35上,转轴35的两端通过轴承座36装配于滑动连接板4上,抓取气缸31的缸体铰接于滑动连接板4上,抓取气缸31的伸缩杆铰接于装配在转轴35上的拐臂37上;抓取气缸31的伸缩杆向前伸出,驱动转轴35带动抓手33向下翻转,抓取拉手111。
36.抓手组件3的工作过程如下:驱动电机71启动,带动滑板1向前移动至断路器11抓取位置后,抓取气缸31的伸缩杆向前伸出,推动转轴35向下旋转,即可带动抓手33向下翻转,直至抓手33抓住断路器11底盘车上的拉手111为止;驱动电机71反向旋转,带动丝杆72反向旋转,丝母向后移动,带动滑板1向后移动,断路器11即可随抓取组件向后移动,直至脱离配电柜,拖至滑板1上;伸缩杆收回,即可带动转轴35向后反向旋转,抓手33脱离拉手111。利用抓手组件3的气缸自动抓取断路器11,并利用驱动电机71的动力自动实现断路器11的
向后拖拽,能够解放操作人员的双手,减轻作业人员的劳动强度,且通过自动控制能够实现精准的对位,也避免了人工手眼动作需要多次尝试抓取的问题。
37.可选地,参见图1至图6所示,抓手33为折弯的钣金件,以便于能够抓住拉手111。同时,为了提高抓手33的强度,防止抓手33在拉拽过程中的变形,在抓手33上依附设置了加强板34,特别地,加强板34可以为矩形钢管。
38.可选地,参见图1至图6所示,拐臂37装配在转轴35上轴承座36的外端,抓手33装配在两个轴承座36之间。同时,在装配拐臂37的转轴35上,设置张紧套38对拐臂37锁止。张紧套38可选为螺母即可,可采用双螺母或配合销钉,实现对关闭的锁止。
39.本实施例提供的断路器11抓取拖拽机构的一种具体实施方式,参见图1至图6所示,抓手组件3还包括调节气缸32及滑动装配于转轴35上的滑块39,抓手33固定于滑块39上,调节气缸32的缸体固定于抓手33上,调节气缸32的伸缩杆与拐臂37连接;转轴35具有可防止滑块39自转的防转结构。
40.基于抓手33和拐臂37设置调节气缸32,抓手33和拐臂37均装配在转轴35上,调节气缸32伸出,抓手33能够沿转轴35移动,从而起到调节两个抓手33之间的间距的作用,通过调节气缸32的调节,能够根据断路器11上拉手111的间距,调节抓手33的间距,保证抓手33与拉手111的位置对应性,调节气缸32也起到对抓手33定位的作用。
41.本实施例提供的断路器11抓取拖拽机构的一种具体实施方式,参见图1至图6所示,调节气缸32的伸缩杆与拐臂37通过浮动接头相连。采用浮动接头连接,使抓手33在调节位移的过程中可起到减振及缓冲作用。
42.本实施例提供的断路器11抓取拖拽机构的一种具体实施方式,参见图1至图6所示,防转结构为设置于转轴35上的防转平面。与转轴35配合的滑块39的内孔与具有防转平面的转轴35段配合,防转平面代替键的功能,起到防止滑块39发生自转的问题,保证能够与转轴35同步旋转,防转平面对于滑块39的滑动也起到导向的作用。拐臂37装配在转轴35的外端,可采用键连接的方式,防止拐臂37的自转。
43.本实施例提供的断路器11抓取拖拽机构的一种具体实施方式,防转结构还可以为如下结构:转轴35的横断面为椭圆形、正方形、正六边形等,还可以在转轴35上设置两个对称的防转平面,以起到拐臂37装配后的防自转作用。当然,转轴35的两端为圆形结构,与轴承座36配合,以便于转轴35的旋转。
44.本实施例提供的断路器11抓取拖拽机构的一种具体实施方式,参见图1至图6所示,拐臂37包括装配于转轴35的轴套、以及径向连接于轴套上的外支臂和内支臂,外支臂与内支臂轴向错位设置,抓取气缸31的伸缩杆铰接于外支臂上,调节气缸32的伸缩杆连接于内支臂上。
45.抓取气缸31及调节气缸32分别铰接在不同的支点上,且通过内支臂与外支臂的错位设置,体现抓取气缸31铰接点与调节气缸32铰接点的不同轴性,进而体现在调节气缸32的伸缩杆与抓取气缸31的铰接点的不同轴性,为抓取气缸31的伸缩提供较大的扭力,从而实现能耗的优化,或者说,实现抓手33翻转抓住拉手111的动作,采用较小的能耗即可。
46.本实施例提供的断路器11抓取拖拽机构的一种具体实施方式,参见图1至图2、图7及图9所示,断路器抓取拖拽机构还包括切换操作组件6,切换操作组件6设置于滑动连接板4上,且位于两组抓手组件3的中间;切换操作组件6包括旋拧电机62、套筒组件61、推杆63、
导轨64及滑座65,导轨64固定于滑动连接板4上,滑座65于导轨64滑动配合,旋拧电机62固定于滑座65上,套筒组件61组装于旋拧电机62的主轴上,推杆63连接于滑座65上。
47.本实施例提供的断路器11抓取拖拽机构的一种具体实施方式,切换操作组件6的作用是当断路器11推入配电柜,并关闭配电柜门后,推杆63向前推动滑座65,滑座65带动旋拧电机62及套筒组件61向前移动,套筒组件61对准断路器11上的摇进摇出操作孔112,实现断路器11试验状态和工作状态的切换。
48.断路器11工作状态的切换,利用电机驱动即可实现,代替了人工手动操作,降低了人工作业的劳动强度。
49.本实施例提供的断路器11抓取拖拽机构的一种具体实施方式,参见图3所示,断路器抓取拖拽机构还包括定位组件8,定位组件8设置于滑板1的前端两侧,定位组件8包括设置于滑板1前端的支座81以及固定于支座81上的定位销82,定位销82用于与配电柜上的定位孔插接。
50.拉出断路器11时,需要保证抓手33与拉手111的位置正对,以便于将断路器11顺畅的拖出;定位组件8随滑板1向前移动,直至定位销82插入配电柜上的定位孔时,断路器11拖出的位置刚刚好。而设置定位销82和定位孔,节省人工操作时反复调节的对位时间和劳动,操作省时省力。
51.本实施例提供的断路器11抓取拖拽机构的一种具体实施方式,参见图1至图3、图8所示,断路器抓取拖拽机构还包括锁止组件5,锁止组件5设置于滑板1的前端中间位置,锁止组件5包括导向板10、折弯板9、锁钩53和弹簧52,导向板10和折弯板9连接于滑板1的前端,锁钩53通过销轴54铰接于折弯板9上,并向后穿过导向板10上的导向孔101,弹簧52连接于锁钩53与固定于滑板1上的耳座51之间,锁钩53用于与配电柜上的锁孔锁止。
52.在拉出断路器11时,锁止组件5随滑板1向前移动,移动至断路器11拖出位置后,当将断路器11拖出的过程中,本机构会受到反向力而具有远离配电柜的趋势,而导致断路器11在拖出过程中出现悬空状态的存在,因此,当定位销82插入定位孔的过程中,锁钩53的斜面逐渐被挤压,锁钩53后端的弹簧52拉伸,锁钩53相对于断路器11拖出的路线上以销轴54为支点,水平旋转呈倾斜状态,直至锁钩53的斜面不受挤压,然后在弹簧52的回复力下回正,锁止在配电柜的锁孔上,保证了在断路器11拖离过程中,本机构与配电柜仍可靠的相接。
53.可选地,定位组件8的支座81固定在折弯板9的两端,而折弯板9的竖板上也设有锁钩53穿过的限位孔91,折弯板9和导向板10对锁钩53形成两个支撑,可保证锁钩53水平的向前移动。
54.本实施例提供的断路器11抓取拖拽机构的一种具体实施方式,参见图1至图2、图7及图9所示,断路器抓取拖拽机构还包括切换操作组件6和锁止组件5,切换操作组件6设置于滑动连接板4上,且位于两组抓手组件3的中间;切换操作组件6包括旋拧电机62、套筒组件61、推杆63、导轨64及滑座65,导轨64固定于滑动连接板4上,滑座65于导轨64滑动配合,旋拧电机62固定于滑座65上,套筒组件61组装于旋拧电机62的主轴上,推杆63连接于滑座65上。锁止组件5设置于滑板1的前端中间位置,锁止组件5包括导向板10、折弯板9、锁钩53和弹簧52,导向板10和折弯板9连接于滑板1的前端,锁钩53通过销轴54铰接于折弯板9上,并向后穿过导向板10上的导向孔101,弹簧52连接于锁钩53与固定于滑板1上的耳座51之
间,锁钩53用于与配电柜上的锁孔锁止。
55.本实施例提供的断路器11抓取拖拽机构的一种具体实施方式,断路器抓取拖拽机构还包括切换操作组件6、锁止组件5和定位组件8,定位组件8设置于滑板1的前端两侧,定位组件8包括设置于滑板1前端的支座81以及固定于支座81上的定位销82,定位销82用于与配电柜上的定位孔插接。
56.定位组件8和锁止组件5共同构成对滑板1的三维定位,也即,xyz方向均实现了限制,避免了在断路器11拖出过程中滑板1移位的问题,保证了断路器11拖拽过程中的安全性。
57.本实施例提供的断路器11抓取拖拽机构的一种具体实施方式,参见图1至图2、图8所示,滑板1的左右两侧分别设有用于支撑断路器11的支撑座2。断路器11拖出,随着滑动连接板4的后移,断路器11移动到滑板1上,并沿两侧的支撑座2移动。具体地,支撑座2包括型钢21和角钢22,型钢21固定在滑板1上,作为角钢22的支撑,角钢22作为断路器11的底盘车的车轮移动的轨道,为断路器11拖出后的支撑及位置提供了可靠的保证。
58.在上述实施例中,对各个实施例的描述都各有侧重,某个实施例中没有详述或记载的部分,可以参见其它实施例的相关描述。
59.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。