技术特征:
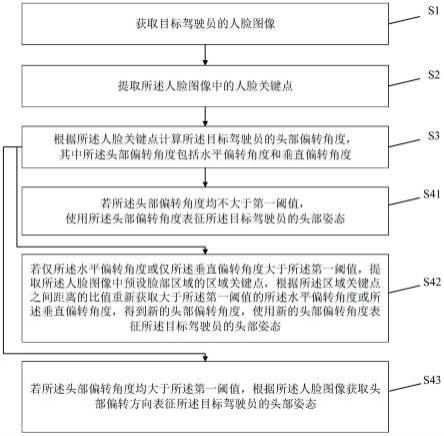
1.一种基于人脸关键点检测的头部姿态分析方法,其特征在于,所述方法包括:获取目标驾驶员的人脸图像;提取所述人脸图像中的人脸关键点;根据所述人脸关键点计算所述目标驾驶员的头部偏转角度,其中所述头部偏转角度包括水平偏转角度和垂直偏转角度;若所述头部偏转角度均不大于第一阈值,使用所述头部偏转角度表征所述目标驾驶员的头部姿态;若仅所述水平偏转角度或仅所述垂直偏转角度大于所述第一阈值,提取所述人脸图像中预设脸部区域的区域关键点,根据所述区域关键点之间距离的比值重新获取大于所述第一阈值的所述水平偏转角度或所述垂直偏转角度,得到新的头部偏转角度,使用新的头部偏转角度表征所述目标驾驶员的头部姿态;若所述头部偏转角度均大于所述第一阈值,根据所述人脸图像获取头部偏转方向表征所述目标驾驶员的头部姿态。2.根据权利要求1所述的基于人脸关键点检测的头部姿态分析方法,其特征在于,所述预设脸部区域包括第一区域、第二区域及第三区域,所述根据所述区域关键点之间距离的比值重新获取大于所述第一阈值的所述水平偏转角度或所述垂直偏转角度的步骤具体包括:获取所述第一区域的区域关键点到所述第二区域的区域关键点的第一距离,获取所述第二区域的区域关键点到所述第三区域的区域关键点的第二距离,根据所述第一距离和所述第二距离计算大于所述第一阈值的所述水平偏转角度或所述垂直偏转角度。3.根据权利要求2所述的基于人脸关键点检测的头部姿态分析方法,其特征在于,若所述水平偏转角度大于所述第一阈值,所述第一区域为脸部左边缘区,所述第二区域为脸部中间区,所述第三区域为脸部右边缘区;若所述垂直偏转角度大于所述第一阈值,所述第一区域为眉眼区,所述第二区域为鼻嘴区,所述第三区域为下巴区。4.根据权利要求1所述的基于人脸关键点检测的头部姿态分析方法,其特征在于,所述获取目标驾驶员的人脸图像的步骤具体包括:获取待测图像,使用第一目标检测算法从所述待测图像中获取目标驾驶员的人脸图像;和/或,所述提取所述人脸图像中的人脸关键点的步骤具体包括:使用人脸关键点检测算法提取所述人脸图像中的人脸关键点;和/或,所述根据所述人脸关键点计算所述目标驾驶员的头部偏转角度的步骤具体包括:通过欧拉角3d仿射将所述人脸关键点与人脸的五官位置进行对应,计算所述目标驾驶员的头部偏转角度;和/或,所述根据所述人脸图像获取头部偏转方向表征所述目标驾驶员的头部姿态的步骤具体包括:使用第二目标检测算法获取所述人脸图像中的头部偏转角度表征所述目标驾驶员的头部姿态;和/或,所述预设脸部区域包括多个标记关键点,使用所述预设脸部区域中标记关键点的坐标平均值表征所述区域关键点。5.一种基于人脸关键点检测的头部姿态分析系统,其特征在于,所述系统包括:人脸图像获取模块,用于获取目标驾驶员的人脸图像;人脸关键点提取模块,用于提取所述人脸图像中的人脸关键点;
头部偏转角度计算模块,用于根据所述人脸关键点计算所述目标驾驶员的头部偏转角度,其中所述头部偏转角度包括水平偏转角度和垂直偏转角度;第一头部姿态估计模块,若所述头部偏转角度均不大于第一阈值,用于使用所述头部偏转角度表征所述目标驾驶员的头部姿态;第二头部姿态估计模块,若仅所述水平偏转角度或仅所述垂直偏转角度大于所述第一阈值,用于提取所述人脸图像中预设脸部区域的区域关键点,根据所述区域关键点之间距离的比值重新获取大于所述第一阈值的所述水平偏转角度或所述垂直偏转角度,得到新的头部偏转角度,使用新的头部偏转角度表征所述目标驾驶员的头部姿态;第三头部姿态估计模块,若所述头部偏转角度均大于所述第一阈值,用于根据所述人脸图像获取头部偏转方向表征所述目标驾驶员的头部姿态。6.根据权利要求5所述的基于人脸关键点检测的头部姿态分析系统,其特征在于,所述预设脸部区域包括第一区域、第二区域及第三区域,所述第二头部姿态估计模块包括:距离获取单元,用于获取所述第一区域的区域关键点到所述第二区域的区域关键点的第一距离,获取所述第二区域的区域关键点到所述第三区域的区域关键点的第二距离;偏转角度计算单元,用于根据所述第一距离和所述第二距离计算大于所述第一阈值的所述水平偏转角度或所述垂直偏转角度。7.根据权利要求6所述的基于人脸关键点检测的头部姿态分析系统,其特征在于,若所述水平偏转角度大于所述第一阈值,所述第一区域为脸部左边缘区,所述第二区域为脸部中间区,所述第三区域为脸部右边缘区;若所述垂直偏转角度大于所述第一阈值,所述第一区域为眉眼区,所述第二区域为鼻嘴区,所述第三区域为下巴区。8.根据权利要求5所述的基于人脸关键点检测的头部姿态分析系统,其特征在于,所述人脸图像获取模块用于获取待测图像,使用第一目标检测算法从所述待测图像中获取目标驾驶员的人脸图像;和/或,所述人脸关键点提取模块用于使用人脸关键点检测算法提取所述人脸图像中的人脸关键点;和/或,所述头部偏转角度计算模块用于通过欧拉角3d仿射将所述人脸关键点与人脸的五官位置进行对应,计算所述目标驾驶员的头部偏转角度;和/或,所述第三头部姿态估计模块用于使用第二目标检测算法获取所述人脸图像中的头部偏转角度表征所述目标驾驶员的头部姿态;和/或,所述预设脸部区域包括多个标记关键点,使用所述预设脸部区域中标记关键点的坐标平均值表征所述区域关键点。9.一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行计算机程序时实现权利要求1-4中任一项所述的基于人脸关键点检测的头部姿态分析方法。10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1-4中任一项所述的基于人脸关键点检测的头部姿态分析方法。
技术总结
本发明公开了一种基于人脸关键点检测的头部姿态分析方法、系统及设备,该方法包括:获取目标驾驶员的人脸图像;提取人脸图像中的人脸关键点;根据人脸关键点计算目标驾驶员的头部偏转角度;若头部偏转角度均不大于第一阈值,使用头部偏转角度表征头部姿态;若仅水平偏转角度或仅垂直偏转角度大于第一阈值,提取人脸图像中预设脸部区域的区域关键点,根据区域关键点之间距离的比值重新获取大于第一阈值的水平偏转角度或垂直偏转角度,得到新的头部偏转角度表征头部姿态;若头部偏转角度均大于第一阈值,根据人脸图像获取头部偏转方向表征头部姿态。该方法采取多种检测方法将检测过程分层,精准分析不同的头部姿态。精准分析不同的头部姿态。精准分析不同的头部姿态。
技术研发人员:曲伟强 王志伟 张倩倩 戴利丰 李利峰
受保护的技术使用者:嘉兴锐明智能交通科技有限公司
技术研发日:2022.06.07
技术公布日:2022/8/9
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。