1.本发明属于目标识别技术领域,特别涉及纠缠光量子成像方法下的目标识别,具体是一种基于纠缠光量子成像的深度学习目标识别方法。
背景技术:
2.目标识别是视频图像处理的主要研究课题之一,已广泛应用在在交通监测、医学诊断、军事等领域。目前,目标识别技术主要通过无线雷达成像和光学成像两种技术途径获取图像信息。基于雷达图像的目标识别技术通过分析并提取目标反射回的电磁波中的特征进行识别。经典光学成像通过光场的一阶关联运算处理获得物体的信息实现成像。
3.但是基于雷达成像和传统光学成像的目标识别技术很难在恶劣环境下发挥作用。雷达成像技术不能有效探测到干扰强、发射信号微弱条件下的目标。瑞利衍射限制了经典光学成像的成像分辨率无法突破。随着量子信息技术的发展,量子理论可以解释经典物理不能解释的现象,例如量子成像。纠缠光量子成像利用信号光束和闲置光束的符合测量结果重构目标的成像图,可克服传统光学成像方法分辨率受光学衍射极限限制的缺陷,可有效抑制大气湍流、烟雾等因素对成像质量的影响。图像的特征提取是实现目标识别的关键环节。深度学习方法能够自动提取到具有丰富语义信息的深层特征,可以用于提取和分类量子图像。然而,纠缠光量子成像图往往缺失局部图像细节信息和颜色信息,使得现有深度学习方法的识别精度和鲁棒性欠佳。
4.为了解决上述问题且为了对纠缠光量子成像目标实现精确的分类,本发明提出了一种新的基于双流特征融合网络的纠缠光量子图像目标识别方法。
技术实现要素:
5.本发明的目的是提供一种基于纠缠光量子成像和深度学习的目标识别方法。与基于雷达成像和传统光学成像的目标识别方法相比,基于纠缠光量子成像的目标识别方案能有效解决传统识别适应环境性能差的问题,且能实现量子成像目标的精确分类。
6.本发明所采用的技术方案为:一种基于双流特征融合网络的纠缠光量子图像目标识别方法,具体包括以下步骤:
7.步骤一、利用波长为405nm的半导体激光器产生高质量的连续泵浦光,利用半波片和四分之一波片将激光调制为线偏振光;
8.步骤二、利用焦距分别为100mm的透镜1和50mm的透镜2组成望远镜系统,对泵浦光进行缩束,使缩束压缩后的泵浦光能量更加集中;
9.步骤三、将泵浦光照射周期极化磷酸氧钛钾(periodically poled ktp,ppktp)晶体进行自发参量下转换产生波长为810nm的纠缠双光子对,双光子纠缠态的波函数表示为:
[0010][0011]
其中,函数描述纠缠光子对的空间位置分布信息,态|0,0》表示纠缠双光子
对的初始态,和为信号光子和闲置光子的产生算符;
[0012]
步骤四、利用透镜3和透镜4对纠缠光束进行扩束,通过波长为810nm的偏振分束器(polarization beam splitter,pbs)将纠缠光子对分离,得到信号光束和闲置光束,它们的频幅函数f(ω)为:
[0013][0014]
其中,ω为纠缠光的中心频率,τ为信号光子和闲置光子通过ppktp晶体产生的时间差;
[0015]
步骤五、将信号光束经过成像透镜5照射放置在距离偏振分束器1米位置的待成像目标,透射过目标物体的信号光子经过透镜6和透镜7进行汇聚,然后通过中心波长为810nm的滤波片滤除非810nm的杂散光,得到高纯度的810nm纠缠信号光束,该光束进入光纤准直器经单模光纤传输入单光子探测器1被收集;
[0016]
步骤六、闲置光束经反射棱镜入射到数字微镜装置(digital micromirror device,dmd)上,经dmd扫描二维空间信息后通过透镜8和透镜9进行汇聚,然后通过中心波长为810nm的滤波片滤除非810nm的杂散光,得到高纯度的810nm纠缠闲置光束,进入光纤准直器经单模光纤传输入单光子探测器2被收集;
[0017]
步骤七、将单光子探测器1和单光子探测器2收集到的信号光子和闲置光子进行符合计数,符合计数可以用光场二阶关联函数表示,即
[0018][0019]
其中,r1和r2分别表示信号和参考光子从透镜7和9到pbs的距离,t1和t2分别表示信号和参考光子的传播时间,e(r1,t1)和e(r2,t2)分别表示信号光路和参考光路的光场,然后根据符合计数测量结果即可实现量子成像;
[0020]
步骤八、将mnist手写数字图片数据集中每个数字的前500张图片进行成像,生成5000张像素为28
×
28的量子成像图,并将其随机分割为包含3500张图片的训练集和包含1500张图片的测试集,处理为深度学习网络的手写数字量子成像图数据集;
[0021]
步骤九、将量子成像图输入构造的双流特征融合网络(two-stream feature fusion convolutional network,tsffcnet),设置卷积模块1的卷积核个数为32,通过1层卷积核为5
×
5、步长为1的卷积变换,保持输入数据的尺寸不变;
[0022]
步骤十、对步骤九的结果进行批标准化(batch normalization,bn)、步长为2的最大池化和修正线性单元(rectified linear unit,relu)激活操作,得到14
×
14大小的浅层特征图;
[0023]
步骤十一、将浅层特征图输入tsffcnet的s流中,提取量子成像目标的目标边缘轮廓、整体背景信息等浅层特征;
[0024]
步骤十二、将浅层特征图输入tsffcnet的d流中,提取量子成像目标的抽象语义信息等深层特征,得到4
×
4大小的特征图;
[0025]
步骤十三、将步骤十一和步骤十二提取到的特征进行融合,并引入概率为0.4的dropout层随机断开网络的连接,防止网络训练过拟合;
[0026]
步骤十四、利用节点数分别为120和80的两层全连接层进一步聚合挖掘目标的特征信息,并将生成的特征向量输入到softmax函数进行计算,得到当前输入样本属于每个数字类别的概率结果矩阵x=[x
0 x
1 x
2 x
3 x
4 x
5 x
6 x
7 x
8 x9]
t
,矩阵x中的标量值xi(i∈{0,1,
…
,9})表示量子成像目标被tsffcnet判别为类别i的概率,标量值最大的角标表示目标量子成像图被判别为某一类数字的结果,从而实现目标的识别分类。
[0027]
所述步骤十一中包括以下步骤:
[0028]
步骤十一(一)、设置s流中卷积核个数为48,将步骤十的结果进行一次卷积核为1
×
1、步长为2的卷积操作,实现2倍下采样效果,生成7
×
7大小的特征图;
[0029]
步骤十一(二)、将特征图输入通道注意力机制模块,利用平均池化和最大池化学习量子成像目标的背景信息和独特纹理特征,通过共享共享多层感知器(multilayer perceptron,mlp)聚合学习到的特征图空间信息,具体计算方法为:
[0030][0031]
其中,δ(
·
)表示relu函数,为输入特征向量,avgpool和maxpool分别表示平均池化和最大池化,和分别表示对输入特征图使用平均池化和最大池化压缩空间维度得到的特征图,w0和w1分别表示节点数量为32和48的mlp隐藏层;
[0032]
步骤十一(三)、将步骤十一(二)得到的通道注意图mc(f)与步骤十一(一)得到的7
×
7特征图相乘进行特征的自适应学习,生成7
×
7大小的特征图;
[0033]
步骤十一(四)、将步骤十一(三)得到的特征图进行全局最大池化,提取量子成像目标关键位置的更精细的特征。
[0034]
所述步骤十二中包括以下步骤:
[0035]
步骤十二(一)、设置卷积模块2的卷积核个数为32,最大池化层感受野大小为3
×
3,步长为2,将步骤十的结果进行一次卷积核为3
×
3、步长为1的卷积操作,并进行bn、最大池化和relu激活操作,生成7
×
7大小的特征图;
[0036]
步骤十二(二)、设置卷积模块3的卷积核个数为48,最大池化层感受野大小为3
×
3,步长为2,将步骤十二(一)的结果进行一次卷积核为3
×
3、步长为1的卷积操作,并进行bn、最大池化和relu激活操作,提取到量子成像目标的深层特征,得到4
×
4大小的特征图。
[0037]
本发明具有以下优点:本发明首先通过单光子探测器收集闲置光子和透射过待成像目标的信号光子,并对收集到的光子进行符合计数,实现手写数字0至9的量子成像;然后建立双流特征融合网络提取0至9的量子成像图的深层特征和浅层特征,并在提取浅层特征的分支结构中引入注意力机制,重点提取目标的边缘轮廓特征;最后,利用全连接层对双流结构提取到的特征进行融合,将最终的特征向量送入softmax分类函数,得到分类结果。本发明方法采用纠缠光量子图像作为数据来源,纠缠光量子图像分辨率高,抗干扰性强,适应环境能力强,无需考虑大气湍流、烟雾、背景物干扰等因素。本发明利用双流特征融合网络
针对量子成像图缺失局部图像细节信息和颜色信息的特点进行特征提取,同时挖掘学习了目标的浅层特征和深层特征,能够提取鲁棒的特征表达,在恶劣的成像条件下也能表现出优异的识别性能。
附图说明
[0038]
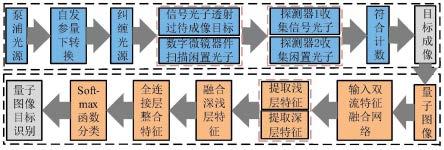
图1为本发明纠缠光量子图像目标识别系统框图;
[0039]
图2为本发明纠缠光量子成像系统示意图;
[0040]
图3为本发明手写数字类别0至9的量子成像图;
[0041]
图4为本发明双流特征融合网络结构。
具体实施方案
[0042]
下面结合附图对本发明作进一步详细描述:
[0043]
步骤一、利用波长为405nm的半导体激光器产生高质量的连续泵浦光,利用半波片和四分之一波片将激光调制为线偏振光;
[0044]
步骤二、利用焦距分别为100mm的透镜1和50mm的透镜2组成望远镜系统,对泵浦光进行缩束,使缩束压缩后的泵浦光能量更加集中;
[0045]
步骤三、将泵浦光照射周期极化磷酸氧钛钾(periodically poled ktp,ppktp)晶体进行自发参量下转换产生波长为810nm的纠缠双光子对,双光子纠缠态的波函数表示为:
[0046][0047]
其中,函数描述纠缠光子对的空间位置分布信息,态|0,0》表示纠缠双光子对的初始态,和为信号光子和闲置光子的产生算符;
[0048]
步骤四、利用透镜3和透镜4对纠缠光束进行扩束,通过波长为810nm的偏振分束器(polarization beam splitter,pbs)将纠缠双光子对分离,得到信号光束和闲置光束,它们的频幅函数f(ω)满足:
[0049][0050]
其中,ω为纠缠光的中心频率,τ为信号光子和闲置光子通过ppktp晶体产生的时间差;
[0051]
步骤五、将信号光束经过成像透镜5照射放置在距离偏振分束器1米位置的待成像目标,透射过目标物体的信号光子经过透镜6和透镜7进行汇聚,然后通过中心波长为810nm的滤波片滤除非810nm的杂散光,得到高纯度的810nm纠缠信号光束,进入光纤准直器经单模光纤传输入单光子探测器1被收集,具体操作如图2所示;
[0052]
步骤六、闲置光束经反射棱镜入射到数字微镜装置(digital micromirror device,dmd)上,经dmd扫描二维空间信息后通过透镜8和透镜9进行汇聚,然后通过中心波长为810nm的滤波片滤除非810nm的杂散光,得到高纯度的810nm纠缠闲置光束,进入光纤准直器经单模光纤传输入单光子探测器2被收集;
[0053]
步骤七、单光子探测器1和单光子探测器2收集到的信号光子和闲置光子进行符合
计数,符合计数可以用光场二阶关联函数表示,即
[0054][0055]
其中,r1和r2分别表示信号和参考光子从透镜7和9到pbs的距离,t1和t2分别表示信号和参考光子的传播时间,e(r1,t1)和e(r2,t2)分别表示信号光路和参考光路的光场,然后根据符合计数测量结果即可实现量子成像;
[0056]
步骤八、将mnist手写数字图片数据集中每个数字的前500张图片进行成像,生成5000张像素为28
×
28的量子成像图,并将其随机分割为包含3500张图片的训练集和包含1500张图片的测试集,处理为深度学习网络的手写数字量子成像图数据集;
[0057]
步骤九、将量子成像图输入构造的双流特征融合网络(two-stream feature fusion convolutional network,tsffcnet),设置卷积模块1的卷积核个数为32,通过1层卷积核为5
×
5、步长为1的卷积变换,保持输入数据的尺寸不变;
[0058]
步骤十、将步骤九的结果进行批标准化(batch normalization,bn)、步长为2的最大池化和修正线性单元(rectified linear unit,relu)激活操作,得到14
×
14大小的浅层特征图;
[0059]
步骤十一、将浅层特征图输入tsffcnet的s流中,提取量子成像目标的浅层特征,具体步骤如下:
[0060]
11.1设置s流中卷积核个数为48,将步骤十的结果进行一次卷积核为1
×
1、步长为2的卷积操作,实现2倍下采样效果,生成7
×
7大小的特征图;
[0061]
11.2将特征图输入通道注意力机制模块,利用平均池化和最大池化学习量子成像目标的背景信息和独特纹理特征,通过共享多层感知器(multilayer perceptron,mlp)聚合学习到的特征图空间信息,具体计算方法为:
[0062][0063]
其中,mc(f)表示输入特征图经上式方法提取特征后生成的特征图,δ(
·
)表示relu函数,表示输入特征向量,avgpool和maxpool分别表示平均池化和最大池化,和分别表示对输入特征图使用平均池化和最大池化压缩空间维度得到的特征图,w0和w1分别表示节点数量为32和48的两层mlp隐藏层;
[0064]
11.3将mc(f)与步骤11.1得到的7
×
7特征图相乘进行特征的自适应学习,生成7
×
7大小的特征图;
[0065]
11.4将步骤11.3得到的特征图进行全局最大池化,提取量子成像目标关键位置的更精细的特征。
[0066]
步骤十二、将浅层特征图输入tsffcnet的d流中,提取量子成像目标的深层特征,得到4
×
4大小的特征图,具体步骤如下:
[0067]
12.1设置卷积模块2的卷积核个数为32,最大池化层感受野大小为3
×
3,步长为2,将步骤十的结果进行一次卷积核为3
×
3、步长为1的卷积操作,并进行bn、最大池化和relu激活操作,生成7
×
7大小的特征图;
[0068]
12.2设置卷积模块3的卷积核个数为48,最大池化层感受野大小为3
×
3,步长为2,将步骤12.1的结果进行一次卷积核为3
×
3、步长为1的卷积操作,并进行bn、最大池化和relu激活操作,提取到量子成像目标的深层特征,得到4
×
4大小的特征图。
[0069]
步骤十三、将步骤十一和步骤十二提取到的特征进行融合,并引入概率为0.4的dropout层随机断开网络的连接,防止网络训练过拟合;
[0070]
步骤十四、利用节点数分别为120和80的两层全连接层进一步聚合挖掘目标的特征信息,并将生成的特征向量输入到softmax函数进行计算,得到当前输入样本属于每个数字类别的概率结果矩阵x=[x
0 x
1 x
2 x
3 x
4 x
5 x
6 x
7 x
8 x9]
t
,矩阵x中的标量值xi(i∈{0,1,
…
,9})表示量子成像目标被tsffcnet判别为类别i的概率,标量值最大的角标表示目标量子成像图被判别为某一类数字的结果,从而实现目标的识别分类。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
