1.本发明涉及一种车辆用控制装置。
背景技术:
2.以往,存在以下技术,即,由连接于将车辆的车体与车轮连接的悬架的下臂的连杆机构式的车辆高度传感器检测车辆高度信息,并将该车辆高度信息用于车辆的姿势控制等。
3.专利文献1:日本特开2006-35937号公报
4.在车辆的制动时、驱动时,存在在车辆中下臂沿水平方向相对移动的情况。在该情况下,存在由车辆高度传感器检测的车辆高度信息的精度降低的情况。
技术实现要素:
5.因此,本发明的一个课题在于,提供在车辆的制动时、驱动时,能够适当地修正由连杆机构式的车辆高度传感器检测的车辆高度信息的车辆用控制装置。
6.作为本公开的一个例子的车辆用控制装置具备:获取部,从连接于悬架的下臂的连杆机构式的车辆高度传感器获取车辆高度信息,上述悬架将车辆的车体与车轮连接;存储部,存储车辆高度误差信息,该车辆高度误差信息是表示对上述车辆沿水平方向施加的作用力与上述车辆高度传感器所输出的上述车辆高度信息中包含的误差的关系的信息;以及修正部,基于获取上述车辆高度信息时作用的上述作用力、和存储于上述存储部的上述车辆高度误差信息,修正由上述获取部获取到的上述车辆高度信息。
附图说明
7.图1是表示实施方式的车辆用控制装置等的功能结构的框图。
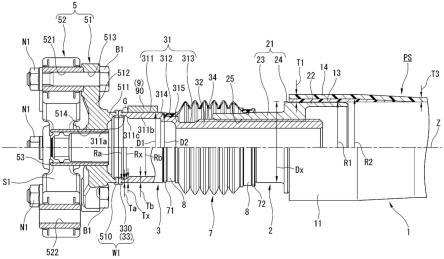
8.图2是示意性地表示实施方式的车辆高度传感器的构造的图。
9.图3是分别示意性地表示在实施方式中(a)关于制动力的车辆高度误差信息、(b)关于驱动力的车辆高度误差信息的图。
10.图4是示意性地表示在实施方式中(a)摩擦制动、(b)再生制动的各自情况的下臂等的动作的俯视图。
11.图5是表示基于实施方式的车辆用控制装置的处理的流程图。
具体实施方式
12.以下,基于附图对本公开的实施方式进行说明。此外,以下所记载的实施方式的结构、以及由该结构带来的作用以及结果(效果)仅是例子,本公开不限于以下的记载内容。
13.首先,参照图1,对实施方式的车辆用控制装置1等的功能结构进行说明。图1是表示实施方式的车辆用控制装置1等的功能结构的框图。车辆用控制装置1具备处理部2和存储部3。另外,在车辆用控制装置1连接有车辆高度传感器4、各种传感器5、各种控制对象部
6。
14.车辆高度传感器4是连接于将车辆的车体与车轮连接的悬架的下臂(以下,也简称为“下臂”。)的连杆机构式的传感器,基于伴随下臂的上下移动的连杆机构的旋转运动检测车辆高度信息。
15.这里,图2是示意性地表示实施方式的车辆高度传感器4的构造的图。车辆高度传感器4包含部分a、部分b、部分c、部件ab、部件cb。部分a安装于车体,部分c安装于下臂。部件ab是连结部分a与部分b的部件,部件cb是连结部分c与部分b的部件。部件ab和部件cb由刚性较高的材料构成且不伸缩。另外,车辆高度传感器4具有将部分b作为连杆的连杆机构。而且,车辆高度传感器4基于连杆机构的旋转运动检测车辆高度信息。
16.例如,如图2的(b)所示,在下臂向下方移动的情况下,安装于下臂的部分c也向下方移动。在该情况下,车辆高度传感器4如图2的(b)所示的那样变形,以图2的(a)为基准,部件ab以部分a为转动轴转动角度θ。车辆高度传感器4使用该角度θ来检测车辆高度信息。
17.如图2的(c)所示,在下臂不沿垂直方向移动而沿水平方向移动的情况下,安装于下臂的部分c也沿水平方向移动。在该情况下,车辆高度传感器4如图2的(c)所示的那样变形,从图2的(a)所示的状态,部件ab以部分a为转动轴转动角度θ。车辆高度传感器4使用该角度θ来检测车辆高度信息。因此,即使下臂未沿垂直方向移动,也检测为车辆高度伴随角度θ变化而变化。在该情况下,车辆高度传感器4所输出的车辆高度信息是包含了误差的车辆高度信息。
18.这样的不伴随向垂直方向的移动的下臂的水平方向的移动主要在车辆的制动时、驱动时产生。因此,预先在实验中,针对车辆,除了设置车辆高度传感器4,还同时设置例如通过激光、超声波等测量车辆与路面的距离的测量器,在车辆的制动时、驱动时,比较基于该测量器的测量结果。由测量器得到的车辆高度的值不受下臂向水平方向的移动造成的影响,因此是实际的车辆高度的值。基于由测量器得到的车辆高度的值、由车辆高度传感器4检测的车辆高度信息、以及制动力、驱动力的大小,来调查车辆高度传感器4所输出的车辆高度信息包含的误差的程度与制动力、驱动力的大小的关系。而且,使用映射图、表、函数等将该关系数据化为车辆高度误差信息。在本实施方式中,车辆高度误差信息是表示车辆高度传感器4所检测的车辆高度信息中包含的误差的程度与对车辆赋予的制动力/驱动力的大小的关系的映射图。
19.图3是分别示意性地表示在实施方式中(a)与制动力有关的车辆高度误差信息、(b)与驱动力有关的车辆高度误差信息的图。这里,对车辆高度误差信息被数据化为映射图的情况进行说明。然而,车辆高度误差信息不限定于此,也可以使用表、函数等。
20.图3的(a)所示的车辆高度误差信息的例子是将纵轴设为车辆高度信息的误差的大小,将横轴设为制动力的映射图。另外,图3的(b)所示的车辆高度误差信息的例子是将纵轴设为车辆高度信息的误差的大小,将横轴设为驱动力的映射图。
21.另外,例如,针对制动力,在摩擦制动力和再生制动力中车辆高度误差信息的内容不同。具体而言,即使在通过摩擦制动力和再生制动力得到相同的制动力的情况下,下臂沿水平方向移动的量也不同。因此,优选将摩擦制动力用的车辆高度误差信息和再生制动力用的车辆高度误差信息分别数据化。此外,制动力是对车辆沿水平方向施加的作用力的例子。
22.图4是示意性地表示在实施方式中(a)摩擦制动、(b)再生制动的各自情况的下臂等的动作的俯视图。首先,参照图4的(a),对摩擦制动的情况进行说明。如图4的(a)所示,在悬架中配置有螺旋弹簧cs、下臂l、拖臂t。
23.具体而言,下臂l的端部l1a安装于轮胎ta的轮毂h,端部l2安装于车体。另外,拖臂t的端部t1a安装于轮胎ta的轮毂h,端部t2安装于车体。
24.而且,在产生摩擦制动力的情况下,从路面对轮胎ta作用摩擦力p,对轮毂h作用力q1。其结果是,轮胎ta、轮毂h、下臂l、拖臂t从实线部分移动至虚线部分。即,在下臂l中,端部l1a移动至附图标记l1b的位置。另外,在拖臂t中,端部t1a移动至附图标记t1b的位置。
25.接下来,参照图4的(b),对再生制动的情况进行说明。如图4的(b)所示,在悬架中配置有螺旋弹簧cs、下臂l、拖臂t。另外,传递力的驱动轴d连接于轮毂h。
26.而且,在产生再生制动力的情况下,对轮胎ta的轮毂h作用来自驱动轴d的力q2,对轮胎ta作用力p。其结果是,轮胎ta、轮毂h、下臂l、拖臂t从实线部分移动至虚线部分。即,在下臂l中,端部l1a移动至附图标记l1b的位置。另外,在拖臂t中,端部t1a移动至附图标记t1b的位置。
27.如比较图4的(a)和(b)可知的那样,在摩擦制动的情况与再生制动的情况下,由于轮胎ta、轮毂h的移动的方式不同,因此下臂l的移动的方式也不同。因此,部分c(图2)安装于下臂l的车辆高度传感器4所检测的车辆高度信息中包含的误差的程度也不同。因此,如上述的那样,优选将摩擦制动力用的车辆高度误差信息和再生制动力用的车辆高度误差信息分别数据化,在摩擦制动的情况和再生制动的情况下分开使用。
28.图1所示的存储部3存储表示沿水平方向对车辆施加的作用力(例如,制动力、驱动力)与车辆高度传感器4所输出的车辆高度信息中包含的误差的程度的关系的信息亦即车辆高度误差信息。例如,作为车辆高度误差信息,存储部3存储第一车辆高度误差信息,该第一车辆高度误差信息是表示作用于车轮的中心部分的第一制动力(例如再生制动力)、与车辆高度传感器4所输出的车辆高度信息中包含的误差的程度的关系的信息。另外,例如,存储部3存储第二车辆高度误差信息,该第二车辆高度误差信息是表示作用于车轮的接地部分的第二制动力(例如摩擦制动力)、与车辆高度传感器4所输出的车辆高度信息中包含的误差的程度的关系的信息。
29.另外,作为车辆高度误差信息,存储部3例如存储第三车辆高度误差信息,该第三车辆高度误差信息是表示作用于车轮的中心部分的第一驱动力、与车辆高度传感器4所输出的车辆高度信息中包含的误差的程度的关系的信息。另外,存储部3例如存储第四车辆高度误差信息,该第四车辆高度误差信息是表示作用于车轮的接地部分的第二驱动力(例如基于轮内马达的驱动力)、与车辆高度传感器4所输出的车辆高度信息中包含的误差的程度的关系的信息。
30.此外,通过上述那样的实验预先制作第一~第四车辆高度误差信息。
31.处理部2例如通过ecu(electronic control unit:电子控制单元)的处理器读取并执行存储于存储器的程序,来实现各功能部。此外,各功能部的一部分或者全部也可以由专用的硬件(电路)实现。处理部2具备获取部21、修正部22、以及姿势控制部23作为功能部。
32.获取部21从车辆高度传感器4、各种传感器5、其它的ecu等获取各种信息。获取部21例如从车辆高度传感器4获取车辆高度信息。另外,获取部21从各种传感器5(车辆高度传
感器4以外的传感器)获取各种传感器值。各种传感器5例如是车轮速度传感器、加速度传感器、转向角传感器、液压传感器、车辆姿势传感器等。获取部21获取由车辆用控制装置1中包含的制动控制装置的ecu(未图示)设定的目标制动力。在本实施方式中,获取部21基于目标制动力和各种传感器5的传感器值来获取实际作用于车辆的制动力。另外,获取部21也可以还获取制动力的种类。制动力的种类例如是摩擦制动力、再生制动力。另外,获取部21获取由车辆用控制装置1中包含的驱动控制装置的ecu(未图示)设定的目标驱动力。在本实施方式中,获取部21基于目标驱动力和各种传感器5的传感器值,获取实际作用于车辆的驱动力。获取部21也可以使获取的制动力/驱动力存储于存储部3,也可以发送至修正部22。获取部21例如将获取的车辆高度信息与制动力/驱动力建立对应地存储于存储部3。在制动力/驱动力存储于存储部3的情况下,后述的修正部22使用存储于存储部3的制动力/驱动力作为获取车辆高度信息时作用的作用力来执行处理。在将制动力/驱动力发送至修正部22的情况下,获取部21例如将车辆高度信息与制动力/驱动力建立对应地发送至修正部22。另外,如后述的那样,修正部22基于获取部21获取的制动力/驱动力,判定是否产生制动力/驱动力。例如,在获取部21获取的制动力/驱动力不足规定值的情况下,修正部22判定为未产生制动力/驱动力。
33.修正部22基于在获取部21获取车辆高度信息时作用的作用力(制动力、驱动力等)、和存储于存储部3的车辆高度误差信息(第一~第四车辆高度误差信息),来修正由获取部21获取到的车辆高度信息。
34.例如,在此时作用有第一制动力的情况下,修正部22基于第一制动力和第一车辆高度误差信息来修正由获取部21获取到的车辆高度信息。另外,在此时作用有第二制动力的情况下,修正部22基于第二制动力和第二车辆高度误差信息来修正由获取部21获取到的车辆高度信息。
35.另外,在此时作用有第一驱动力的情况下,修正部22基于第一驱动力和第三车辆高度误差信息来修正由获取部21获取到的车辆高度信息。另外,在此时作用有第二驱动力的情况下,修正部22基于第二驱动力和第四车辆高度误差信息来修正由获取部21获取到的车辆高度信息。
36.姿势控制部23通过基于由修正部22修正后的车辆高度信息控制各种控制对象部6,来执行车辆的姿势控制。
37.接下来,参照图5,对基于实施方式的车辆用控制装置1的处理进行说明。图5是表示基于实施方式的车辆用控制装置1的处理的流程图。
38.首先,在步骤s1中,获取部21从车辆高度传感器4获取车辆高度信息。接下来,在步骤s2中,修正部22基于来自各种传感器5的传感器值等判定是否在车辆产生制动力。在产生制动力的情况下(s2:“是”),进入步骤s3,在未产生制动力的情况下(s2:“否”),进入步骤s4。
39.在步骤s3中,修正部22基于产生的制动力和存储于存储部3的车辆高度误差信息来修正车辆高度信息。在步骤s3中,修正部22根据产生的制动力的种类来使用第一车辆高度误差信息和第二车辆高度误差信息中的至少一方。步骤s3之后,进入步骤s4。
40.在步骤s4中,修正部22基于来自各种传感器5的传感器值等判定是否在车辆产生驱动力。在产生驱动力的情况下(s4:“是”),进入步骤s5,在未产生驱动力的情况下(s4:“否”),进入步骤s6。
41.在步骤s5中,修正部22基于产生的驱动力和存储于存储部3的车辆高度误差信息来修正车辆高度信息。在步骤s5中,修正部22根据产生的驱动力的种类来使用第三车辆高度误差信息和第四车辆高度误差信息中的至少一方。步骤s5之后,进入步骤s6。
42.在步骤s6中,姿势控制部23基于车辆高度信息、来自各种传感器5的传感器值等判定是否需要车辆的姿势控制。在需要车辆的姿势控制的情况下(s6:“是”),进入步骤s7,在不需要车辆的姿势控制的情况下(s6:“否”),结束处理。
43.在步骤s7中,姿势控制部23通过基于车辆高度信息(在由修正部22进行了修正的情况下为修正后的车辆高度信息)等控制各种控制对象部6,来执行车辆的姿势控制。
44.这样,根据本实施方式的车辆用控制装置1,通过预先在存储部3存储车辆高度误差信息,从而在获取了车辆高度信息的情况下,对在车辆作用有规定的作用力(制动力、驱动力)时,能够基于该作用力和车辆高度误差信息,来适当地修正车辆高度信息。即,能够通过修正使在车辆的制动时、驱动时通过在车辆中下臂沿水平方向相对移动而检测到的表示与实际的车辆高度不同的值的车辆高度信息成为适当的值。而且,通过使车辆高度信息成为适当的值,能够更高精度地执行车辆的姿势控制。
45.另外,作为制动力用的车辆高度误差信息,分别存储摩擦制动力用的车辆高度误差信息和再生制动力用的车辆高度误差信息,通过在摩擦制动的情况与再生制动的情况下分开使用,能够在制动力产生时更高精度地修正车辆高度信息。
46.另外,作为驱动力用的车辆高度误差信息,分别存储作用于车轮的中心部分的第一驱动力用的车辆高度误差信息和作用于车轮的接地部分的第二驱动力用的车辆高度误差信息,通过分开使用它们,能够在驱动力产生时更高精度地修正车辆高度信息。
47.以上,说明了本公开的实施方式,但上述实施方式只是一个例子,并非意在限定发明的范围。上述新的实施方式能够通过各种方式实施,在不脱离发明的主旨的范围内,能够进行各种省略、置换或者变更。另外,上述实施方式及其变形包含在发明的范围、主旨中,并且包含在权利要求书记载的发明及其等同的范围中。
48.例如,在一台车辆中设置多个车辆高度传感器4的情况下,也可以对每个车辆高度传感器4制作单独的车辆高度误差信息。
49.另外,制动力用的车辆高度误差信息也可以按照液压制动器用和epb(electric parking brake:电动驻车制动)用来分别制作。
50.另外,车辆高度误差信息也可以还考虑车辆中的乘客的位置、车辆重量、行驶距离、行驶时间等其它的条件来制作,并根据这些条件和当时的状况来使用。
51.另外,也可以不将获取部21获取的车辆高度信息与制动力/驱动力建立对应。例如,获取部21也可以将分别在不同的定时获取的车辆高度信息与制动力/驱动力发送至存储部3、修正部22。在该情况下,存储部3也可以每当从获取部21接收信息就更新将当前的车辆高度信息与制动力/驱动力建立对应的表。修正部22也可以参照存储于存储部3的表来执行处理。这样,即使在获取部21在不同的定时获取车辆高度信息和作用力的情况下,修正部22也可以将在修正车辆高度信息时使用的作用力作为获取车辆高度信息时作用的作用力来执行处理。
52.另外,也可以不执行图5所示的步骤s6和步骤s7。在该情况下,也可以在步骤s5中
修正车辆高度信息后,结束处理。在该情况下,也能够通过修正车辆高度信息,来进行使用了修正后的车辆高度信息的控制等。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。