1.本实用新型涉及清洁机器人技术领域,尤其涉及一种集尘装置及清洁机器人。
背景技术:
2.清洁机器人是指能够自动对地面进行清洁的机器人,随着人们的生活水平提高,清洁机器人已走入人们的日常生活中,大大降低了人们的劳动量,随着智能扫地机器人经过不断的发展,配备有充电、吸尘、清洗抹布功能一体的智能基站已经成为智能扫地机器人的一个发展趋势。
3.现有专利(申请号为:cn202021748407.x)公开了一种集尘装置及清洁机器人,其中集尘装置包括:尘盒,设有容尘腔和连通容尘腔的出风口,过滤组件,连通容尘腔,以及振动组件,连接于过滤组件上,清洁机器人设有上述的集尘装置,本实用新型提供的集尘装置及清洁机器人具有以下优点:通过设置连接于过滤组件的振动组件,以振动的方式将过滤组件上的灰尘抖落,避免灰尘堵塞过滤组件的过滤孔,保证了过滤组件的过滤效果,进而提升了安装有该集尘装置的清洁机器人的清洁能力,同时提升了过滤组件的过滤使用时长,延长了过滤组件的使用寿命。但是,该装置很难对不同方位、角度的垃圾进行清理,降低了该装置的实用性。
技术实现要素:
4.本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种集尘装置及清洁机器人。
5.为了实现上述目的,本实用新型采用了如下技术方案:一种集尘装置及清洁机器人,包括集尘基站和机器人,所述集尘基站内部上方固定设置有集尘盒,所述集尘基站内部且位于集尘盒下端固定设置有风机,所述机器人下端且位于两个驱动轮之间固定设置有排尘口,所述集尘基站且位于底座上固定设置有连接管,所述机器人前端侧壁固定设置有保护垫,所述机器人下端后方固定设置有清理垫,所述机器人下端靠前方两侧均转动设置有转动座,两个所述转动座下端均固定设置有电动伸缩杆,两个所述电动伸缩杆的输出端均转动设置有清扫刷,所述机器人上端固定设置有控制单元。
6.作为上述技术方案的进一步描述:
7.所述集尘基站上端通过铰链转动设置有盖板。
8.作为上述技术方案的进一步描述:
9.所述风机上端固定连接在集尘盒下端,所述风机下端固定连接有吸尘通道。
10.作为上述技术方案的进一步描述:
11.所述机器人下端靠中部两侧均设置有驱动轮,所述机器人下端靠前方中部转动设置有前置轮。
12.作为上述技术方案的进一步描述:
13.所述连接管连接在排尘口上。
14.作为上述技术方案的进一步描述:
15.所述保护垫由硅胶材料制成。
16.作为上述技术方案的进一步描述:
17.所述控制单元包括信号接收器、检测激光导航模块、摄像头、信号发射器和控制器。
18.作为上述技术方案的进一步描述:
19.所述机器人下端中部转动设置有滚轮元件。
20.本实用新型具有如下有益效果:
21.1、本实用新型提出的一种集尘装置及清洁机器人,该装置通过转动座带动电动伸缩杆转动,使清扫刷可以对对角度、方位进行清扫,通过电动伸缩杆控制清扫刷对不同距离的位置进行清扫,提高了该装置的清洁性,同时提高其工作效率。
22.2、本实用新型提出的一种集尘装置及清洁机器人,该装置在机器人前端侧壁设置有保护垫,且保护垫由硅胶材料制成,具有一定的弹性,防止机器人在工作过程中撞向墙面导致损坏,提高机器人的使用寿命。
23.3、本实用新型提出的一种集尘装置及清洁机器人,该机器人清扫完成时,会自动回到集尘基站,通过风机将机器人清扫的垃圾吸入到集尘盒内,使该装置自动化程度高,给使用者带来极大的便利。
附图说明
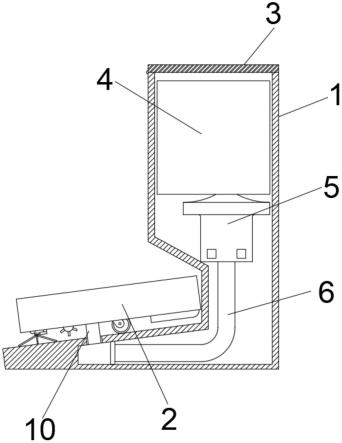
24.图1为本实用新型提出的一种集尘装置及清洁机器人的正剖视图;
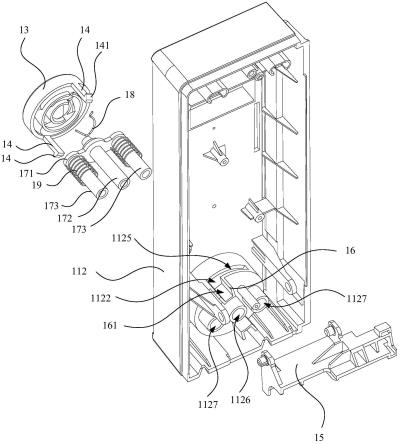
25.图2为本实用新型提出的一种集尘装置及清洁机器人的机器人仰视图;
26.图3为本实用新型提出的一种集尘装置及清洁机器人的机器人立体图;
27.图4为图2中a处的放大图。
28.图例说明:
29.1、集尘基站;2、机器人;3、盖板;4、集尘盒;5、风机;6、吸尘通道;7、驱动轮;8、前置轮;9、排尘口;10、连接管;11、保护垫;12、清理垫;13、转动座;14、电动伸缩杆;15、清扫刷;16、控制单元;17、滚轮元件。
具体实施方式
30.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
31.在本实用新型的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制;术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性,此外,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是
可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
32.参照图1-4,本实用新型提供的一种实施例:一种集尘装置及清洁机器人,包括集尘基站1和机器人2,集尘基站1内部上方固定设置有集尘盒4,集尘基站1内部且位于集尘盒4下端固定设置有风机5,通过风机5将机器人2清扫的垃圾吸入到集尘盒4内,机器人2下端且位于两个驱动轮7之间固定设置有排尘口9,集尘基站1且位于底座上固定设置有连接管10,机器人2前端侧壁固定设置有保护垫11,通过保护垫11可以防止机器人2在工作过程中撞向墙面导致损坏,机器人2下端后方固定设置有清理垫12,对地面进行擦洗,机器人2下端靠前方两侧均转动设置有转动座13,两个转动座13下端均固定设置有电动伸缩杆14,两个电动伸缩杆14的输出端均转动设置有清扫刷15,通过转动座13带动电动伸缩杆14转动,使清扫刷15可以对对角度、方位进行清扫,通过电动伸缩杆14控制清扫刷15对不同距离的位置进行清扫,机器人2上端固定设置有控制单元16;
33.集尘基站1上端通过铰链转动设置有盖板3,风机5上端固定连接在集尘盒4下端,风机5下端固定连接有吸尘通道6,机器人2下端靠中部两侧均设置有驱动轮7,使机器人2进行移动,机器人2下端靠前方中部转动设置有前置轮8,连接管10连接在排尘口9上,保护垫11由硅胶材料制成,控制单元16包括信号接收器、检测激光导航模块、摄像头、信号发射器和控制器,机器人2下端中部转动设置有滚轮元件17,将清扫的垃圾通过滚轮元件17收集到机器人2内的收集盒内。
34.工作原理:该集尘装置及清洁机器人使用时,通过转动座13带动电动伸缩杆14转动,使清扫刷15可以对对角度、方位进行清扫,通过电动伸缩杆14控制清扫刷15对不同距离的位置进行清扫,提高了该装置的清洁性,同时提高其工作效率,通过保护垫11可以防止机器人2在工作过程中撞向墙面导致损坏,机器人2清扫完成时,会自动回到集尘基站1,通过风机5将机器人2清扫的垃圾吸入到集尘盒4内,使该装置自动化程度高。
35.最后应说明的是:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。