1.本实用新型涉及一种浮动刮板,尤其是指一种用于外墙刮腻子的浮动刮板。
背景技术:
2.在房屋建造时,房屋的墙体表面是凹凸不平的,影响房屋的美观性,刮腻子是使用腻子对不平整的墙面进行填补和修复,使墙面变平整。
3.目前,人工进行刮腻子,人工刮腻子是预先将腻子涂在墙面上,再用抹腻子刮板将墙上的腻子抹平,最后用墙面找平刮板对墙面进行找平,需要使用三种不同的工具完成三个施工工艺,工艺比较复杂,工具比较多,工作效率低。刮腻子的效果好坏根据工人的经验判断,工人在高空施工时存在一定的安全风险。所以为了解决以上人工刮腻子的问题,提高工作效率,使用机器人进行作业,将人工刮腻子的三个步骤集成到一个机器人手臂上,操作更加便捷。但是,目前的刮腻子都是需要先将腻子提前刮在墙上,然后通过刮板进行刮平,造成施工效率不高,而且由于机器人目前无法做到像工人手臂一样的灵活性和柔线性,带刚性刮板的机器人在作业过程中,刚性刮板无法与墙面很好的贴合,导致刮抹后墙面不平整,达不到合格的要求。
技术实现要素:
4.本实用新型所要解决的技术问题是:提供一种用于外墙刮腻子的浮动刮板,以提高刮腻子的效率。
5.为了解决上述技术问题,本实用新型采用的技术方案为:一种用于外墙刮腻子的浮动刮板,包括,腻子存储料盒,腻子存储料盒连接有伸缩盒,腻子存储料盒与伸缩盒之间连通,伸缩盒连接有抹腻子刮板,抹腻子刮板上设有腻子出料口,腻子出料口与伸缩盒之间连通,抹腻子刮板上设有呈90度弯折的墙面找平刮板;在腻子存储料盒与抹腻子刮板之间设有浮动阻尼组件。
6.进一步的,所述抹腻子刮板上的腻子出料口设有多个,多个腻子出料口横向沿着抹腻子刮板均匀分布。
7.进一步的,所述腻子存储料盒上设有腻子进料口。
8.进一步的,所述浮动阻尼组件包括直线轴承组件、弹簧、阻尼器和转接板;直线轴承组件连接抹腻子刮板与转接板;弹簧和阻尼器安装在抹腻子刮板和转接板之间。
9.进一步的,所述转接板设有两块,分别设在腻子存储料盒的两端。
10.进一步的,两块转接板上均设有测距系统。
11.进一步的,所述测距系统为激光测距系统。
12.进一步的,所述直线轴承组件及弹簧设有两个,两个弹簧分别套设在两个直线轴承组件上。
13.进一步的,所述阻尼器设有两个,分别设在抹腻子刮板的两端。
14.进一步的,所述腻子存储料盒上设有基座,基座用于将安装在抹腻子机器人上。
15.本实用新型的有益效果在于:通过腻子存储料盒、伸缩盒、腻子出料口之间的连通,能够省略刮腻子前需要预先将腻子涂在墙上的步骤,能够提高刮腻子的效率;浮动阻尼组件能够有效提高抹腻子刮板与墙面的贴合度及刮腻子后墙面的平整度,通过墙面找平刮板来实现墙面找平,为机器人更高效的完成更高质量的施工提供保障。
附图说明
16.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图示出的机构获得其他的附图。
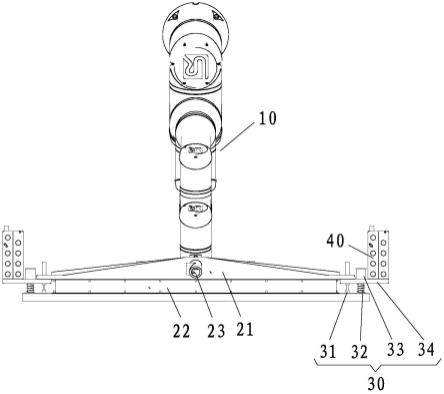
17.图1为本实用新型实施例的用于外墙刮腻子的浮动刮板与抹腻子机器人结构图;
18.图2为本实用新型实施例的用于外墙刮腻子的浮动刮板的前视图;
19.图3为本实用新型实施例的用于外墙刮腻子的浮动刮板的侧视图;
20.其中,10-抹腻子机器人、21-腻子存储料盒、22-伸缩盒、23-腻子进料口、24-抹腻子刮板、25-腻子出料口、26-基座、27-墙面找平刮板、30-浮动阻尼组件、31-阻尼器、32-弹簧、33-直线轴承组件、34-转接板、40-测距系统。
具体实施方式
21.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型的一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
22.需要说明,本实用新型中涉及“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本实用新型要求的保护范围之内。
23.如图1-图3所示,本实用新型的实施例为:一种用于外墙刮腻子的浮动刮板,包括,腻子存储料盒21,腻子存储料盒21连接有伸缩盒22,腻子存储料盒21与伸缩盒22之间连通,伸缩盒22连接有抹腻子刮板24,抹腻子刮板24上设有腻子出料口25,腻子出料口25与伸缩盒22之间连通,抹腻子刮板24上设有呈90度弯折的墙面找平刮板27;在腻子存储料盒21与抹腻子刮板24之间设有浮动阻尼组件30。
24.其中,所述抹腻子刮板24上的腻子出料口25设有多个,多个腻子出料口25横向沿着抹腻子刮板24均匀分布,在本实施例中,腻子出料口25设有六个。
25.其中,所述腻子存储料盒21上设有腻子进料口23,腻子进料口23设有一个,通过腻子进料口23从外部给腻子存储料盒21添加腻子。
26.其中,所述浮动阻尼组件30包括直线轴承组件33、弹簧32、阻尼器31和转接板34;直线轴承组件33连接抹腻子刮板24与转接板34;弹簧32和阻尼器31安装在抹腻子刮板24和
转接板34之间。通过浮动阻尼组件30,抹腻子机器人10能够带着设有浮动阻尼组件30的抹腻子刮板24对墙面进行抹腻子,浮动阻尼组件30有效地解决了抹腻子刮板24与墙面的贴合度的问题,解决了抹腻子后墙面平整度的问题,为抹腻子机器人10更高效地完成更高质量的施工提供保障。
27.其中,所述转接板34设有两块,分别设在腻子存储料盒21的两端。两块转接板34上均设有测距系统40。所述测距系统40为激光测距系统40。通过在转接板34上设两个激光测距系统40,能够使得抹腻子机器人10能够精准识别抹腻子刮板24板与墙面之间的距离,从而使得抹腻子机器人10可以精准控制实现自动刮腻子。
28.其中,所述直线轴承组件33及弹簧32设有两个,两个弹簧32分别套设在两个直线轴承组件33上。
29.其中,所述阻尼器31设有两个,分别设在抹腻子刮板24的两端。
30.直线轴承组件33、弹簧32及阻尼器31均设两个,能够使得抹腻子刮板24在浮动时,受力均匀,有利于提高抹腻子后墙面平整度。
31.其中,所述腻子存储料盒21上设有基座26,基座26用于将安装在抹腻子机器人10上。基座26安装在腻子存储料盒21的背面。
32.用于外墙刮腻子的浮动刮板的工作原理:抹腻子机器人10带着抹腻子刮板24浮动向墙面运动,当抹腻子刮板24的下沿接触到墙面时,抹腻子机器人10带着基座26继续向墙面运动3mm,阻尼器31收缩使抹腻子刮板24进行浮动并提供稳定的力,使抹腻子刮板24与墙面贴合平整,此时,腻子从抹腻子刮板24的腻子出料口25处流出,抹腻子机器人10带着从下向上移动进行刮腻子,抹腻子机器人10刮完一定距离后,关闭腻子进料口23,抹腻子机器人10带着抹腻子刮板24脱离墙面,机器人调整姿态,使墙面找平刮板27接触墙面,抹腻子机器人10带着基座26继续向墙面运动3mm,阻尼器31收缩使墙面找平刮板27进行浮动并提供稳定的力,使墙面找平刮板27与墙面贴合平整,抹腻子机器人10带着浮动刮板从上向下移动进行墙面找平,抹腻子机器人10刮完一定距离后,抹腻子机器人10带着墙面找平刮板27脱离墙面,该区域工作完成,进行下一个区域作业。
33.本实用新型实施例的有益效果在于:通过腻子存储料盒21、伸缩盒22、腻子出料口25之间的连通,能够省略刮腻子前需要预先将腻子涂在墙上的步骤,能够提高刮腻子的效率;浮动阻尼组件30能够有效提高抹腻子刮板24与墙面的贴合度及刮腻子后墙面的平整度,通过墙面找平刮板27来实现墙面找平,为机器人更高效的完成更高质量的施工提供保障。
34.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本实用新型的专利保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
