1.本实用新型属于免疫诊断技术领域,具体涉及一种试剂条抓取装置、全自动化学发光分析仪。
背景技术:
2.目前ivd(in vitro diagnostic,体外诊断)行业poct(point-of-care testing,即时检验)仪器越来越关注使用成本,以前的多人份封装浪费量大。现在各poct厂家都在开发单人份封装试剂,但因poct仪器体积要求小和通量要求高,所以大多厂家都采用将单人份试剂放在固定位置,然后推到反应位置,也即目前用于体外诊断单人份的试剂条(卡)移动机构,通常采用推动的方式,只能进行平移的动作,使用场景受限较大,且在移动过程中控度差,移动到位后准确度差,试剂条抓取过程中缺乏状态监控。
技术实现要素:
3.因此,本实用新型要解决的技术问题在于提供一种试剂条抓取装置、全自动化学发光分析仪,所述试剂条的位置可以在高度方向及水平方向上被调整,从而能够丰富所述试剂条抓取装置的使用场景。
4.为了解决上述问题,本实用新型提供一种试剂条抓取装置,包括:
5.安装件;
6.夹爪单元,包括相对设置的两个夹爪臂;
7.抓取装置驱动部件,装设于所述安装件上,能够驱动两个所述夹爪臂彼此相向或者相背运动,以形成对试剂条的相对两个侧壁的夹持,并能够在所述夹爪臂夹持所述试剂条后驱动所述夹爪单元沿直线上升;
8.横移驱动部件,能够将所述安装件、夹爪单元、抓取装置驱动部件同时沿水平直线平移。
9.在一些实施方式中,
10.所述夹爪单元还包括夹爪旋转安装板,其与所述安装件固定连接,两个所述夹爪臂可枢转地连接于所述夹爪旋转安装板上,且两个所述夹爪臂的对应一端还枢转连接于往复滑块上,所述往复滑块与所述抓取装置驱动部件的动力输出轴连接,当所述动力输出轴靠近所述夹爪臂运动时,两个所述夹爪臂彼此相背运动,当所述动力输出轴远离所述夹爪臂运动时,两个所述夹爪臂彼此相向运动;和/或,两个所述夹爪臂的彼此相对的一侧设有卡条。
11.在一些实施方式中,
12.所述往复滑块上构造有沿水平方向延伸的滑槽,所述夹爪臂的所述对应一端通过轴承可滑动地连接于所述滑槽中。
13.在一些实施方式中,
14.所述抓取装置驱动部件包括丝杆电机,所述动力输出轴为所述丝杆电机具有的丝
杆,所述安装件上还设有导轨,所述往复滑块滑动连接于所述导轨上。
15.在一些实施方式中,
16.邻近所述丝杆远离所述夹爪单元的一端设置有第一光电传感器,用于检测所述丝杆的位置。
17.在一些实施方式中,
18.所述夹爪单元还包括试剂条施压组件,能够在所述夹爪单元对所述试剂条夹持或者解除夹持时,施力于所述试剂条上。
19.在一些实施方式中,
20.所述试剂条施压组件包括施力柱,所述施力柱可上下滑动地插装于所述夹爪旋转安装板上,所述施力柱朝向所述试剂条的一端为施力盘,所述施力盘与所述夹爪旋转安装板之间夹设有弹性件。
21.在一些实施方式中,
22.所述施力柱远离所述试剂条的一端具有u形件,所述夹爪旋转安装板至少部分地处于所述u形件的开口区域内;和/或,所述施力柱远离所述试剂条的一端具有检测片,对应所述检测片设置有第二光电传感器,所述第二光电传感器用于检测所述施力柱的位置。
23.在一些实施方式中,
24.所述试剂条施压组件具有两组,两组所述试剂条施压组件分别一一处于所述夹爪旋转安装板的长度方向的两端,所述夹爪旋转安装板的长度方向的两端与所述试剂条的长度方向的两端分别对应,所述第二光电传感器具有两个,两个所述第二光电传感器分别一一对应所述夹爪旋转安装板的长度方向的两端设置。
25.本实用新型还提供一种全自动化学发光分析仪,包括试剂条抓取装置,所述试剂条抓取装置为上述的试剂条抓取装置。
26.本实用新型提供的一种试剂条抓取装置、全自动化学发光分析仪,所述夹爪单元能够对试剂条形成夹持并驱动试剂条在高度方向上直线运动,同时所述横移驱动部件则能够在水平方向驱动所述试剂条直线运动,也即所述试剂条的位置可以在高度方向及水平方向上被调整,从而能够丰富所述试剂条抓取装置的使用场景,这同时利于相应的全自动化学发光分析仪的对应部件在高度及水平空间内的合理布局,结构可以被设计的更加紧凑。
附图说明
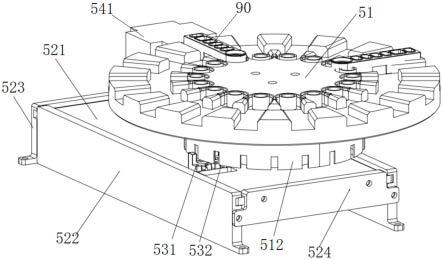
27.图1为本实用新型实施例的试剂条抓取装置的立体结构示意图;
28.图2为图1中的试剂条抓取装置的正视结构示意图。
29.附图标记表示为:
30.41、安装件;411、导轨;421、夹爪臂;4211、轴承;4212、卡条;4213、轴承销;422、夹爪旋转安装板;423、往复滑块;4231、滑槽;4241、施力柱;4242、施力盘;4243、弹性件;4244、u形件;4245、检测片;43、丝杆电机;441、第一光电传感器;442、第二光电传感器;90、试剂条。
具体实施方式
31.参见图1至图2所示,根据本实用新型的实施例,提供一种试剂条抓取装置,包括:
安装件41;夹爪单元,包括相对设置的两个夹爪臂421;抓取装置驱动部件,装设于所述安装件41上,能够驱动两个所述夹爪臂421彼此相向或者相背运动,以形成对试剂条90的相对两个侧壁的夹持,并能够在所述夹爪臂421夹持所述试剂条90后驱动所述夹爪单元沿直线上升;横移驱动部件(图中未示出,未标引),能够将所述安装件41、夹爪单元、抓取装置驱动部件同时沿水平直线平移。该技术方案中,所述夹爪单元能够对试剂条90形成夹持并驱动试剂条90在高度方向上直线运动,同时所述横移驱动部件则能够在水平方向驱动所述试剂条90直线运动,也即所述试剂条90的位置可以在高度方向及水平方向上被调整,从而能够丰富所述试剂条抓取装置的使用场景,这同时利于相应的全自动化学发光分析仪的对应部件在高度及水平空间内的合理布局,结构可以被设计的更加紧凑。
32.在一些实施方式中,所述夹爪单元还包括夹爪旋转安装板422,其与所述安装件41固定连接,也即所述夹爪旋转安装板422与所述安装件41之间的相对位置不发生变动,两个所述夹爪臂421可枢转地连接于所述夹爪旋转安装板422上,且两个所述夹爪臂421的对应一端还枢转连接于往复滑块423上,所述往复滑块423与所述抓取装置驱动部件的动力输出轴连接,当所述动力输出轴靠近所述夹爪臂421运动时,两个所述夹爪臂421彼此相背运动,当所述动力输出轴远离所述夹爪臂421运动时,两个所述夹爪臂421彼此相向运动。该技术方案中,所述抓取装置驱动部件带动所述往复滑块423的往复运动,利用所述往复滑块423的往复位移变动施力于两个所述夹爪臂421的所述对应一端,从而使所述夹爪臂421能够围绕其与所述夹爪旋转安装板422的枢转连接点旋转,从而实现两个所述夹爪臂421的相向或者相背运动,进而实现对所述试剂条90的夹持或者解除夹持,这种驱动方式利用所述往复滑块423与所述夹爪旋转安装板422的相对位置实现夹持与解除夹持的动作,结构设计简单紧凑,且控制逻辑更加简单,无需单独针对每个所述夹爪臂421的动作进行控制。
33.为了能够实现更加可靠的夹持,两个所述夹爪臂421的彼此相对的一侧设有卡条4212,其在两个所述夹爪臂421相向运动时,能够与所述试剂条90对应侧壁上的凹槽形成配合,有效防止夹持过程中试剂条90的滑脱。在一个更优的实施方式中,所述卡条4212朝向所述试剂条90的一侧设有倒角,以能够对夹持过程起到导向和位置矫正的功能,保证抓取准确。
34.在一些实施方式中,所述往复滑块423上构造有沿水平方向延伸的滑槽4231,所述夹爪臂421的所述对应一端通过轴承4211可滑动地连接于所述滑槽4231中,具体的,所述夹爪臂421的所述对应一端穿设有轴承销4213,所述轴承销4213的两端分别套装有所述轴承4211,通过所述轴承4211,所述夹爪臂421的所述对应一端能够在所述滑槽4231内沿其槽的长度方向滑动,保证所述往复滑块423对所述夹爪臂421的运动的顺畅驱动,防止夹持或者接触夹持过程中的卡顿现象发生。
35.作为一种具体的实现方式,所述抓取装置驱动部件包括丝杆电机43(其通过相应的电机安装座与所述安装件41之间固定连接),所述动力输出轴为所述丝杆电机43具有的丝杆,所述丝杆电机43能够将回转角位移直接转化为所述丝杆的直线位移,所述安装件41上还设有导轨411,所述往复滑块423滑动连接于所述导轨411上,从而实现往复滑块423的直线位移驱动,简化所述试剂条抓取装置的结构,同时结构更加紧凑。同时需要说明的是,采用所述丝杆电机43还可以利用丝杆具有的自锁力,让试剂条90在移动和抓取过程中不会异常掉落。
36.在一些实施方式中,邻近所述丝杆远离所述夹爪单元的一端设置有第一光电传感器441,用于检测所述丝杆的位置,可以理解的,所述第一光电传感器441固定于与所述丝杆电机43的安装座体相对不动的部件上,例如固定在所述安装件41上,从而能够在所述丝杆远离所述夹爪臂421所在一侧运动且达到预设位置时,被触发发出相应的位置信号,进而控制所述丝杆电机43停止运转。也即所述第一光电传感器441的设置目的在于对所述丝杆的回退最大位置进行检测、限定。
37.所述夹爪单元还包括试剂条施压组件,能够在所述夹爪单元对所述试剂条90夹持或者解除夹持时,施力于所述试剂条90上,当在所述夹持过程中施力于所述试剂条90上能够与所述夹爪臂421上的卡条4212形成对所述试剂条90在高度方向上的可靠夹持,防止试剂条90的位置变动,当在所述接触夹持过程中,则能够利于所述试剂条90从所述夹爪单元中的顺畅脱出。
38.在一些实施方式中,所述试剂条施压组件包括施力柱4241,所述施力柱4241可上下滑动地插装于所述夹爪旋转安装板422上,所述施力柱4241朝向所述试剂条90的一端为施力盘4242,所述施力盘4242与所述夹爪旋转安装板422之间夹设有弹性件4243,该技术方案中,所述夹爪旋转安装板422还被作为所述施力柱4241的位移引导部件,保证所述施力柱4241能够稳定可靠地上下滑动,简化了结构设计,所述弹性件4243例如套装于所述施力柱4241外周侧的弹簧,利用所述弹性件4243的弹性补偿作用,能够柔性施力于所述试剂条90上,防止刚性接触带来的冲击损坏。
39.所述施力柱4241远离所述试剂条90的一端具有u形件4244,所述夹爪旋转安装板422至少部分地处于所述u形件4244的开口区域内,能够有效防止所述施力柱4241为圆柱杆状时可能存在的圆周位移变动;所述施力柱4241远离所述试剂条90的一端具有检测片4245,对应所述检测片4245设置有第二光电传感器442,所述第二光电传感器442用于检测所述施力柱4241的位置,当所述施力柱4241的端部设置所述u形件4244时,所述检测片4245被设置于所述u形件4244朝向所述第二光电传感器442的一侧,当所述夹爪臂421夹持所述试剂条90时,所述施力柱4241将被向上推出一段位移,与之相对应的所述检测片4245也将靠近所述第二光电传感器442的一侧发生位移并进入所述第二光电传感器442的感应范围内,进而实现对所述试剂条90是否夹持在位的检测。
40.在一些实施方式中,所述试剂条施压组件具有两组,两组所述试剂条施压组件分别一一处于所述夹爪旋转安装板422的长度方向的两端,所述夹爪旋转安装板422的长度方向的两端与所述试剂条90的长度方向的两端分别对应,所述第二光电传感器442具有两个,两个所述第二光电传感器442分别一一对应所述夹爪旋转安装板422的长度方向的两端设置,通过在所述长度方向的两端同时设置所述第二光电传感器442,也即同时对所述试剂条90的长度方向的两端进行检测,可以有效监测所述试剂条90在解除夹持放置入目标位置(例如相应的卡槽)中时异常卡顿(当发生卡顿时,两端的两个第二光电传感器442将不会同时检测到相应的检测片4245)。
41.根据本实用新型的实施例,还提供一种全自动化学发光分析仪,包括试剂条抓取装置,所述试剂条抓取装置为上述的试剂条抓取装置。
42.本领域的技术人员容易理解的是,在不冲突的前提下,上述各有利方式可以自由地组合、叠加。
43.以上仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。以上仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型技术原理的前提下,还可以做出若干改进和变型,这些改进和变型也应视为本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。