一种基于k-近邻互信息的时间同步方法
技术领域
1.本发明涉及通信领域,尤其是时间同步领域,具体是一种基于k-近邻互信息的时间同步方法。
背景技术:
2.时间同步是通过对本地时钟的某些操作,实现为分布式系统提供统一时间标度的过程。作为整个无线通信领域的核心技术,时间同步精度直接决定了通信质量优劣。在集中式系统中,由于所有进程或者模块都可以从系统唯一的全局时钟获取时间,系统内任何两个事件都有着明确的先后关系。但在分布式系统中,由于物理上的分散性,系统无法为彼此间相互独立的模块提供统一的全局时钟,只能由各个进程或模块各自维护它们的本地时钟。但由于这些本地时钟的计时速率、运行环境不一致,即使所有本地时钟在某一时刻都被校准,一段时间后,还是会出现不一致的现象。为使这些本地时钟再次达到相同的时间值,必须进行时间同步操作。
3.传统的互相关时间同步方法在非线性失真条件下同步性能表现一般,随着近几年计算机与信息技术的发展,基于神经网络等机器学习算法的时间同步方法获得了广泛关注和研究,并取得了一些成果。这类时间同步方法虽然在一定程度上能够提高系统时间同步性能,但面临着训练时间长、网络参数调优复杂、泛化能力差等诸多问题。
4.互信息是一种由信息论发展而来的度量变量相关程度的方法,它从信息论角度出发评估变量间共有信息量的多少,不受变量之间是否线性的影响,而k-近邻互信息能够避免直接计算概率密度,具有算法简单和运算量小的特点。
技术实现要素:
5.针对现有技术的缺陷,本发明提供一种基于k-近邻互信息的时间同步方法,采用k-近邻互信息方法对时间信号之间的迟延进行估计,能够根据共有信息量对两列时间信号之间的迟延进行估计,进而实现时间同步,有效提高同步效率和精度。
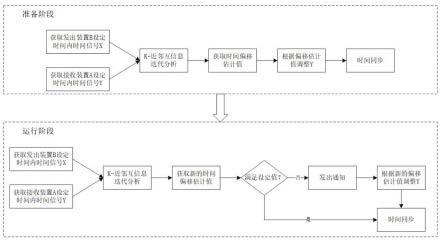
6.为了解决所述技术问题,本发明采用的技术方案是:一种基于k-近邻互信息的时间同步方法,包括以下步骤:s01)、正式运行前,获取设定时间内发出信号装置和接收信号装置的时间信号序列;s02)、准备阶段,根据步骤s01)获取的时间信号序列,利用k-近邻互信息算法计算接收信号装置相对发出信号装置在准备阶段的时间偏移估计值,根据准备阶段的时间偏移估计值调整接收信号装置的时间,完成初始时间同步;s03)、运行阶段,在装置运行过程中,定期获取发出信号装置和接收信号装置的时间信号序列,然后采取k-近邻互信息算法分析接收信号装置相对发出信号装置在运行阶段的时间偏移估计值,将运行阶段的时间偏移估计值与设定值比较,若运行阶段的时间偏移估计值满足设定值要求,则不做任何操作,装置仍保持正常工作,若运行阶段的时间偏移估计值超出设定值要求,则根据该时间偏移估计值调整信号接收装置的时间,从而完成运行过程中的时间同步。
7.进一步的,准备阶段利用k-近邻互信息算法计算准备阶段的时间偏移估计值的具
体过程为:s21)、设置准备阶段的初始延迟为0,延迟更新值为t,步骤s01)获取发出信号装置和接收信号装置的时间信号序列之后,利用k-近邻互信息算法计算两种时间信号序列之间的互信息值;s22)、发出信号装置的时间信号序列保持不动,接收信号装置的时间信号序列向前移动t时间步长,再次利用k-近邻互信息算法计算发出信号装置的时间信号序列与移动后的接收信号装置时间信号序列之间的互信息值;s23)、重复步骤s22,直到计算的互信息值不再增大,若此次为第n次计算,则此时的时间偏移估计值为(n-1)t。
8.进一步的,得到准备阶段的时间偏移估计值后,在信号接收装置时间的基础上加上时间偏移估计值,即完成初始时间同步。
9.进一步的,采取k-近邻互信息算法分析接收信号装置相对发出信号装置在运行阶段的时间偏移估计值的具体过程为:s31)、设置运行阶段的初始延迟为(n-1)t,延迟更新值为t’,获取运行阶段的发出信号装置和接收信号装置的时间序号序列之后,利用k-近邻互信息算法计算两者时间信号序列之间的互信息值,将计算的互信息值与设定值比较,若满足设定值要求,则不做任何操作,装置仍保持正常工作,则超出设定值要求,则进行下一步骤;s32)、发出信号装置的时间信号序列保持不动,接收信号装置的时间信号序列向前移动t’时间步长,再次利用k-近邻互信息算法计算发出信号装置的时间信号序列与移动后的接收信号装置时间信号序列之间的互信息值;s23)、重复步骤s22,直到计算的互信息值不再增大,若此次为第m次计算,则此时的时间偏移估计值为(n-1)t (m-1)t’。
10.进一步的,在得到运行阶段的时间偏移估计值后,在信号接收装置时间的基础上加上时间偏移估计值,即完成运行阶段的时间同步。
11.进一步的,运行阶段采集的时间信号序列与准备阶段采集的时间信号序列保持一致。
12.进一步的,步骤s01)获取的时间信号序列包含至少两个完整的时间周期。
13.本发明的有益效果:本发明采用k-近邻互信息算法实现信号序列时间同步,与传统互相关时间同步方法相比,能够有效提高时间同步效率和精度,特别是在非线性失真和信道参数变化的通信场景;与神经网络等机器学习方法相比,能够避免长时间训练、网络参数重复调优复杂以及模型泛化能力差等诸多问题。
附图说明
14.图1为本发明的整体流程图;图2为准备阶段的流程图;图3为运行阶段的流程图;图4为基于k-近邻互信息算法计算时间偏移估计值的流程图。
具体实施方式
15.下面结合附图和具体实施例对本发明作进一步的说明。
16.实施例1在信号传播过程中,虽然两路信号的绝对时间戳没有对齐,但以信号源时间为参考,这两路信号在任意时刻的变化趋势一定是与信号源相同的,由于传播过程中会产生时延问题,信号发出装置b记录到的振荡比信号接收装置a稍微靠前。直观来讲,如果信号发出
装置b发出的信号x和信号接收装置a接收的信号y是同步的,那么当x达到峰值时,y也应该达到峰值,x达到0值时,y也应该达到0值。可以考虑,保持x不动,把信号y往前滑动一段时间,则x和y相同变化的趋势会变大,即x和y两列信号的共有信息量会增多,当x和y完全对齐时,x和y同步变化。即,当x和y相同变化趋势最大,共有信息量最多时,装置a和装置b时间同步。
17.本实施例公开一种基于k-近邻互信息的时间同步方法,如图1所示,包括以下步骤:s01)、正式运行前,获取设定时间内发出信号装置和接收信号装置的时间信号序列。
18.假设,装置a和装置b分别为接收和发出时间信号的两个装置,x为b装置发出的时间信号序列,y为a装置接收的时间信号序列。根据经验设定采样时间,至少需要包含两个完整的时间周期,获取装置a和装置b在此周期内的时间信号序列。
19.s02)、准备阶段,如图2所示,根据步骤s01)获取的时间信号序列,利用k-近邻互信息算法计算接收信号装置相对发出信号装置在准备阶段的时间偏移估计值,根据准备阶段的时间偏移估计值调整接收信号装置的时间,完成初始时间同步,装置开始正常运行。
20.s03)、运行阶段,如图3所示,在装置运行过程中,定期获取发出信号装置和接收信号装置的时间信号序列,然后采取k-近邻互信息算法分析接收信号装置相对发出信号装置在运行阶段的时间偏移估计值,将运行阶段的时间偏移估计值与设定值比较,若运行阶段的时间偏移估计值满足设定值要求,则不做任何操作,装置仍保持正常工作,若运行阶段的时间偏移估计值超出设定值要求,则根据该时间偏移估计值调整信号接收装置的时间,从而完成运行过程中的时间同步。
21.本实施例中,如图4所示,准备阶段利用k-近邻互信息算法计算准备阶段的时间偏移估计值的具体过程为:s21)、设置准备阶段的初始延迟为0,延迟更新值为t,步骤s01)获取发出信号装置和接收信号装置的时间信号序列之后,利用k-近邻互信息算法计算两种时间信号序列之间的互信息值;s22)、发出信号装置的时间信号序列保持不动,接收信号装置的时间信号序列向前移动t时间步长,再次利用k-近邻互信息算法计算发出信号装置的时间信号序列与移动后的接收信号装置时间信号序列之间的互信息值;s23)、重复步骤s22,直到计算的互信息值不再增大,若此次为第n次计算,则此时的时间偏移估计值为(n-1)t。
22.得到准备阶段的时间偏移估计值后,在信号接收装置时间的基础上加上时间偏移估计值,即完成初始时间同步。
23.采取k-近邻互信息算法分析接收信号装置相对发出信号装置在运行阶段的时间偏移估计值的具体过程为:s31)、设置运行阶段的初始延迟为(n-1)t,延迟更新值为t’,获取运行阶段的发出信号装置和接收信号装置的时间序号序列之后,利用k-近邻互信息算法计算两者时间信号序列之间的互信息值,将计算的互信息值与设定值比较,若满足设定值要求,则不做任何操作,装置仍保持正常工作,则超出设定值要求,则进行下一步骤;s32)、发出信号装置的时间信号序列保持不动,接收信号装置的时间信号序列向前移动t’时间步长,再次利用k-近邻互信息算法计算发出信号装置的时间信号序列与移动后的接收信号装置时间信号序列之间的互信息值;s23)、重复步骤s22,直到计算的互信息值不再增大,若此次为第m次计算,则此时的时间偏移估计值为(n-1)t (m-1)t’。
24.本实施例中,将计算的互信息值与设定值比较,是比较互信息值与设定值的大小,如果互信息值大于设定值,则认为满足设定值要求,如果互信息值小于设定值,则认为不满足设定值要求。
25.在得到运行阶段的时间偏移估计值后,在信号接收装置时间的基础上加上时间偏移估计值,即完成运行阶段的时间同步。
26.本实施例中,运行阶段采集的时间信号序列与准备阶段采集的时间信号序列保持一致。
27.需要说明的是,以上内容对本发明的原理及实施方式进行了详细阐述,该内容仅仅用作帮助理解本发明的方法及其核心思想,本发明的保护范围并不仅局限于上述实施例。对于本领域的普通技术人员可以根据本发明公开内容做出各种不脱离本发明实质的其它各种改进和变形,这些变化仍然在本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。