1.本发明涉及板宽检测技术领域,具体涉及一种基于机器视觉的板宽检测方法。
背景技术:
2.在轧制生产线中,对板宽的实时监测是板材生产过程中必不可少的检测环节。目前工厂主要采用人工检测的方式,该方法不仅劳动强度高,效率低,而且误差波动较大。采用激光测距传感器进行板宽检测时,存在安装不便、测量范围有限等缺点,并且需要多个传感器数据进行拼接,运算量大、时效性差、不能很好地满足生产节奏。在辊道上方架设门式支架,并在支架上固定相机与激光器进行检测的方式,安装调试不便,且这种测量方式对后期辊道检修造成一定不便,后期相机与激光器的维护也存在一定的不便。本发明所提供的方法是采用辊道两侧对称布置面阵相机与线激光器的方式,通过检测两侧辊道边缘与板材边缘的距离值,将辊道长度减去两侧距离值得出板材的宽度值,不仅对后期辊道的检修影响较小,而且不需要考虑图像拼接问题,计算量小,实时性好,能够很好的满足工厂生产节奏。
3.激光条纹中心的提取受到激光发射器、实际环境与被测物体材质等方面影响,针对环境干扰、反光、激光条纹宽度变化、物体表面形状不规则和反射特性不一致等现象,都会导致预处理后的光条图像的灰度和宽度不均匀,有噪声、分枝、断线现象出现,这些都会影响激光条纹中心的准确提取。本发明所用方法不仅提取速度快、实时性好,而且获得的中心点坐标与实际相差不大。通过阈值选择可以进一步提高板宽检测的准确性和精度。
4.工厂实际生产过程中环境恶劣,碰撞较多且灰尘较大,所以相机需要装入防护罩中,通过三维云台安装于支架上。但是现场存在着较强的振动,且手动固定云台一般由螺栓固定在支架上,随着振动云台角度会发生变化,导致相机角度发生变化,这将对后期的检测精度造成一定影响。目前工厂主要靠人工调整的方式进行维护,为工厂的生产带来不便。本发明所提及的方法通过像素、实际测量值与变化角度之间的关系对测量误差进行补偿,该方法不仅可以有效提高板宽检测的测量精度以及设备有效运行时间,而且减少了后期相机与激光器的维护次数。
技术实现要素:
5.本发明的目的在于解决现有技术中的问题,提供一种基于机器视觉的辊道板宽检测方法,该方法可提高工厂生产效率,通过以下步骤实现辊道的板宽检测,步骤如下:步骤1,打开装有滤光片的相机和激光器,相机采集辊道与板材上表面数字图像,激光器发射均匀清晰的激光线;步骤2,通过roi选择感兴趣区域,选择计算范围;步骤3,采用高斯滤波算法对图像进行降噪处理,得到平滑图像,二维高斯滤波函数如下:
其中,为高斯分布的标准差,代表数据的离散程度,x为图像中的横坐标,y为图像中的纵坐标。
6.步骤4,先采用灰度重心法计算激光条纹中心线坐标,再通过三次多项式函数对中心线进行拟合;步骤5,通过阈值选择进行筛选,选出两个计算点;步骤6,相机标定完成后,计算得到板材的宽度值为辊道宽度值与左、右两侧板材距辊道边缘的距离值之差;步骤7,根据相机标定的数据进行判断,如果辊道边缘像素点发生变化,则说明相机角度发生了变化,利用像素、实际测量值与变化角度之间的关系进行误差补偿。
7.设备采用ccd面阵工业相机与蓝色线激光器,相机安装蓝色滤光片;根据斜射式激光三角测距原理,面阵相机与线激光器对称布置在辊道两侧同一水平线上,面阵相机布置于辊道上方1米处,线激光器位于相机正下方0.5米处,面阵相机与线激光器形成一定角度,保证线激光器发射出均匀清晰的激光线垂直于辊道边,面阵相机可以清晰拍摄到辊道边缘与板材边缘之间的间距,并对相机进行平面标定;相机与激光器固定于三维云台上,三维云台通过螺栓连接安装于支架上;云台包含三个自由度,具有水平和垂直回转的功能,调整方向时可松开方向调节螺栓进行。
8.在上述的技术方案中,本发明所提供的一种基于机器视觉的辊道板宽检测方法,其有益效果如下:本发明采用面阵相机与线激光器对称布置在辊道两侧同一水平线上的安装方法,对板材进行宽度检测。该方法有效的解决了一个相机拍摄视野不足的问题,同时为后期辊道的检修以及相机与激光器的维护提供了便利条件。板材的宽度值为辊道宽度值与左、右两侧板材距辊道边缘的距离值之差,便于计算且误差较小。
9.本发明为了提高运算效率,采用roi选择感兴趣区域方法使相机只保留了有效视野。针对具有图像噪声这一问题,采用高斯滤波算法对图像进行降噪处理,得到平滑图像,为后续光线中心的提取去除了干扰,提高了提取精度。先采用灰度重心法计算激光条纹中心线坐标,再通过三次多项式函数对中心线进行拟合,该方法不仅提取速度快、实时性好,而且获得的中心点坐标与实际相差不大。阈值选择进一步提高了检测的准确性和精度。
10.本发明考虑到实际应用过程中由于现场存在着较强的振动,后期云台角度会发生变化,导致相机角度发生改变,这将对后期的检测精度造成影响。针对这一现象,采用像素、实际测量值与变化角度之间的关系对测量误差进行补偿的方法,不仅提高了后期的检测精度,而且减少了后期相机设备的维护工作,使用时间有所延长。
附图说明
11.此处所说明的附图用来提供对本发明的进一步理解,构成本技术的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。
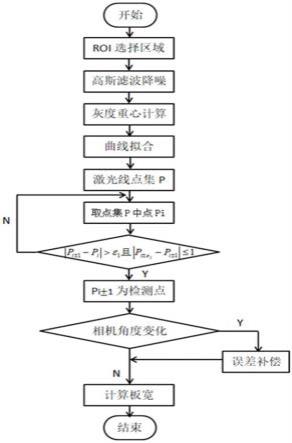
12.图1为本发明方法的整体流程图。
13.图2为本发明方法的测量原理示意图。
14.图3为本发明方法的设备布置示意图。
15.图4为本发明方法的云台示意图。
16.图5为本发明方法的灰度重心提取的激光线示意图。
17.图6为本发明方法的曲线拟合后的激光线示意图。
18.图中,1为工业相机,2为一字线激光器,3为板材,4为辊道,5为视场角,6为支架,7为手动固定云台,8为灰度重心提取板材表面激光线,9为灰度重心提取辊道边缘表面激光线,10为曲线拟合提取板材表面激光线,11为曲线拟合提取辊道边缘表面激光线。
具体实施方式
19.为使本发明要解决的技术方案和优点更加清晰,下面将结合附图及具体实施例进行详细描述。
20.本发明提供了一种基于机器视觉的辊道板宽检测方法,如图1所示,包括以下步骤:步骤1,打开装有滤光片的相机1和激光器2,相机1采集辊道4与板材3上表面数字图像,激光器2发射均匀清晰的激光线;步骤2,通过roi选择感兴趣区域,选择计算范围;roi选择感兴趣区域将面阵相机1边缘视野去除,左右视野调整至大于左、右两侧板材距辊道4边缘一定值,上下视野调整至大于激光线畸变宽度一定值,确定范围后将该范围的激光点存入点集p,再进行阈值选择。一侧相机区域视野大小s为:其中,l
左
为辊道4边缘像素v减30像素,l
右
为板材3边缘v像加30像素,l
上
为激光线最上方像素u减5像素,l
下
为激光线最下方像素u加5像素。
21.步骤3,采用高斯滤波算法对图像进行降噪处理,得到平滑图像,二维高斯滤波函数如下:其中,为高斯分布的标准差,代表数据的离散程度,x为图像中的横坐标,y为图像中的纵坐标。
22.步骤4,先采用灰度重心法计算激光条纹中心线坐标,如图5所示,再通过三次多项式函数对中心线进行拟合,如图6所示;其中灰度重心法原理公式为:
其中,ii为图片像素对应的灰度值,u为最后得到的像素坐标值。
23.三次多项式曲线拟合公式为:其中,p1、p2、p3、p4为拟合系数,x为像素值u。
24.步骤5,通过阈值选择进行筛选,选出两个计算点;所述的阈值选择条件为:其中,为线激光发生畸变的阈值,为测宽有效点阈值。
25.步骤6,相机1标定完成后,计算得到板材3的宽度值为辊道4宽度值与左、右两侧板材3距辊道4边缘的距离值之差,如图2所示;板材3宽度k的计算公式为:其中,l为辊道4的宽度值,l1为左侧板材3距辊道4边缘的距离值,l2为右侧板材3距辊道4边缘的距离值。
26.步骤7,根据相机1标定的数据进行判断,如果辊道4边缘像素点发生变化,则说明相机1角度发生了变化,利用像素、实际测量值与变化角度之间的关系进行误差补偿。相机1标定完成后,辊道4边缘所对应激光像素点应固定不变,如果像素点发生变化则说明相机1角度发生了变化,导致相机1与激光器2之间夹角发生微小变化,对测量精度造成一定影响。如果辊道4边缘像素点移动超过3个像素点,则测量精度不满足工厂生产精度,需要进行误差补偿。利用像素、实际测量值与变化角度之间的关系进行误差补偿,补偿过程为:步骤7-1,原辊道4边缘点像素值为v1,实际坐标值为y1。相机1角度发生变化后,辊道4边缘点像素值变为v2,实际坐标值变为y2。引起的实际坐标值误差 为:步骤7-2,相机1安装高度为h,相机1的视野是固定不变的,可计算得到变化的角度:其中,为原辊道4边缘点计算得到的角度,为相机1角度变化后辊道4边缘点计算得到的角度,为引起的角度误差。
27.步骤7-3,相机1角度变化后板材3边缘点像素为v3,实际坐标值为y3,则相机1角度变化后板材3边缘点计算得到的角度为:
步骤7-4,计算可得原板材3边缘点计算得到的角度和原板材3边缘点像素值v4所对应的实际坐标值y4分别为:步骤7-5,由此计算可得板材3宽度k为:采用ccd面阵工业相机1与蓝色线激光器2,相机1安装蓝色滤光片;根据斜射式激光三角测距原理,面阵相机1与线激光器2对称布置在辊道4两侧同一水平线上,设备布置示意图如图3所示,面阵相机1布置于辊道4上方1米处,线激光器2位于相机1正下方0.5米处,面阵相机1与线激光器2形成一定角度,保证线激光器2发射出均匀清晰的激光线垂直于辊道4边,面阵相机1可以清晰拍摄到辊道4边缘与板材3边缘之间的间距,并对相机1进行平面标定;相机1与激光器2固定于三维云台7上,三维云台7通过螺栓连接安装于支架6上。云台7有三个自由度,可调节相机1的位置、角度。云台示意图如图4所示。
28.以上所述的仅是本发明的优选实施方式,应当指出,对于本技术领域中的普通技术人员来说,在不脱离本发明核心技术特征的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。