1.本发明属于精密驱动与定位技术领域,具体涉及一种同步谐振惯性冲击线性压电马达。
背景技术:
2.压电马达是利用压电材料的逆效应工作的一种新型马达。近年来,压电马达由于其体积小,功率密度大,响应快,无电磁干扰等优点广泛应用于精密驱动与定位、生物技术、医疗设备、航天科技等领域。根据驱动原理,压电陶瓷(pzt马达可分为超声马达和准静态马达)。超声马达一般由摩擦力驱动。通过行波或驻波在定子与转子之间高频传播。由于超声马达的高频特性,可以实现相对较高的工作速度,但是由于摩擦力的作用,定子和转子的材料很快就会磨损,马达的效率和使用寿命受到驱动原理的限制。准静态马达的频率相对较低,如尺蠖马达、惯性冲击马达。尺蠖马达通过夹紧单元和驱动振子的配合实现单向运动。由于电机在准静态下的运行频率较低,大多数准静态马达的输出速度都很低,但是使用寿命比超声波马达长很多。
3.现有的惯性冲击线性压电马达的普遍结构为不对称结构,借助结构在两个运动方向的不对称,产生不对称惯性力,驱动马达实现单向运动。这种借助惯性不对称原理所涉及的压电马达,缺点十分明显:由于运动原理是借助机械结构不对称实现的,导致马达的运动方向有很大限制,即只能朝一个方向运动,大大降低了实用性;并且由于马达运行过程中会产生较大摩擦力,导致马达的机械磨损十分严重,大量的热能转换导致马达工作效率低下。还有一些惯性冲击线性马达为了克服机械不对称的缺点,选择由不对称信号(锯齿波、方波)驱动,但这种改进会加大控制系统的复杂程度,并不是很好的选择。
技术实现要素:
4.为了提高线性压电马达的效率和使用寿命,本发明提供一种同步谐振惯性冲击的线性压电马达。
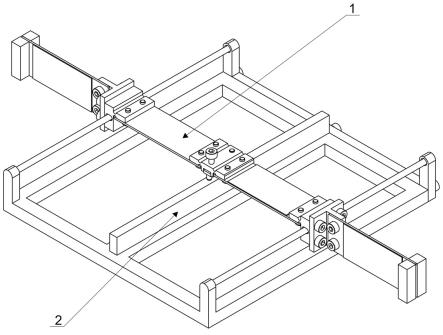
5.一种同步谐振惯性冲击的线性压电马达包括动子模块1和底座机构2;所述动子模块1包括结构相同的一对驱动振子11、钳位机构12、一对滑块13;所述驱动振子11包括动子压电陶瓷片113;所述钳位机构12包括中心安装块121、一对钳位压电陶瓷片123和弹性钳位片125;一对钳位压电陶瓷片123分别对称固定设于中心安装块121两侧,所述弹性钳位片125固定设有中心安装块121底部;弹性钳位片125的一端设有钳位磨头1251;所述底座机构2包括日字形的底座主体21、定位凸台212、一对导杆23;所述定位凸台212固定设于底座主体21中部的横杆上,一对导杆23通过竖直支架固定设于底座主体21相对应的两侧边上方,且平行于定位凸台212;所述一对滑块13分别通过腰形孔空套在一对导杆23上,一对动子模块1通过一对滑块13设于底座2上,且使一对动子压电陶瓷片113呈直立状对称位于底座2两侧的外部;
钳位机构12的钳位磨头1251支撑在定位凸台212的顶部,一对钳位压电陶瓷片123呈水平状位于底座2上方,一对动子压电陶瓷片113呈直立状对称位于底座2两侧的外部;工作时,首先调整钳位机构12的预紧力,使钳位磨头1251与定位凸台212接触,并产生预紧摩擦力;分别向一对动子压电陶瓷片113和一对钳位压电陶瓷片123输入相同的正弦信号,钳位机构12开始上下往复振动,在一个振动周期内,带动弹性钳位足125做抵住或不接触定位凸台212的运动,即实现钳位和释放两种工作状态;钳位状态时,马达静止;释放状态时,马达在一对驱动振子11的振动作用下水平运动;实现马达在一个完整的工作周期里的单向运动;若使马达反向水平运动,只需改变所输入正弦信号的相位,使一对动子压电陶瓷片113和一对钳位压电陶瓷片123上的输入信号相位差1/2个周期即可。
6.进一步的技术方案如下:所述驱动振子11包括振子基板112、动子压电陶瓷片113和一对配重块114;所述动子压电陶瓷片113固定设于振子基板112上;一对配重块114固定设有振子基板112一端的两侧面上,振子基板112另一端上固定设有振子连接块111。
7.所述钳位机构12还包括一对连接基板122;一对钳位压电陶瓷片123分别固定在一对连接基板122上;一对连接基板122的一端分别对称固定连接着中心安装块121的两侧,一对连接基板122的另一端分别固定连接着滑块13;所述弹性钳位足125通过预紧螺栓124固定设于中心安装块121底面。
8.所述中心安装块121的底面呈槽钢状,槽钢中部的凹槽为安装槽1212,所述弹性钳位片125通过预紧螺栓124固定设于安装槽1212内。
9.所述滑块13为角钢状,一侧边板为直立边板,另一侧边板为水平边板;直立边板中部设有贯通的腰形孔131;一对滑块13的直立边板分别固定连接着一对驱动振子11的一端,使一对驱动振子11的一对配重块114呈悬臂状;一对滑块13的水平边板分别固定连接着与一对钳位压电陶瓷片123的一端对应的钳位机构12的两端。
10.本发明的有益技术效果体现在以下方面:1.本发明结构上对称式布局,不借助机械不对称来实现马达的运动,而是通过同步谐振实现自动钳位的方式控制马达的运动。本发明由定子模块和底座组成;动子模块集成了驱动、钳位和导向等机械结构,结构简单。钳位状态下马达由钳位机构锁死,滑动摩擦力大大减小,使运动损耗更小,解决了传统非对称结构式惯性冲击马达摩擦力过大影响使用寿命的问题。
11.2.本发明的驱动信号为最简单的正弦波信号,相比与传统惯性冲击线性马达的非对称信号驱动,本发明只需两路正弦信号即可,控制系统简单,控制成本较低。
12.3.本发明的工作状态为谐振状态。经过验证,马达样机的工作频率为136 hz,与仿真结果一致。驱动电压为300 v时,马达的空载输出速度和最大负载分别为23.5mm/s和86 g,相比于准静态马达输出性能更好。
13.4.本发明可以实现双向运动。只需要改变两路输入信号的相位差即可实现马达的反向运动,十分高效便捷。
附图说明
14.图1为本发明结构示意图。
15.图2为动子模块结构示意图。
16.图3为驱动振子结构示意图。
17.图4为钳位机构结构示意图。
18.图5为滑块结构示意图。
19.图6为底座结构示意图。
20.图7为马达预紧力施加原理示意图。
21.图8为图7的剖视图。
22.图9为钳位机构振动模态仿真结果图。
23.图10为驱动振子振动模态仿真结果图。
24.图11为马达双向同步谐振运动原理图。
25.上图中序号:动子模块1、底座2、驱动振子11、钳位机构12、滑块13、底座主体21、侧板22、导杆23、振子连接块111、振子基板112、动子压电陶瓷片113、配重块114、中心安装块121、连接基板122、钳位压电陶瓷片123、预紧螺栓124、弹性钳位片125、腰型孔131、柔性铰链132、竖直支架211、定位凸台212、竖直支架221、通孔222、柔性铰链1211、安装槽1212、钳位磨头1251。
具体实施方式
26.下面结合附图,通过实施例对本发明作进一步地说明。
27.参见图1,一种同步谐振惯性冲击的线性压电马达包括动子模块1和底座机构2。
28.参见图2,动子模块1包括结构相同的一对驱动振子11、钳位机构12、一对滑块13。
29.参见图3,驱动振子11包括振子基板112、动子压电陶瓷片113和一对配重块114。动子压电陶瓷片113固定设于振子基板112上;一对配重块114固定设有振子基板112一端的两侧面上,振子基板112另一端上固定设有振子连接块111。
30.参见图4,钳位机构12包括中心安装块121、一对连接基板122、一对钳位压电陶瓷片123和弹性钳位足125。一对钳位压电陶瓷片123分别固定在一对连接基板122上;一对连接基板122的一端分别对称固定连接着中心安装块121的两侧,一对连接基板122的另一端分别固定连接着滑块13。
31.参见图5,滑块13为角钢状,一侧边板为直立边板,另一侧边板为水平边板;直立边板中部开设有贯通的腰形孔131。参见图2,一对滑块13分别通过腰形孔131套装在一对导杆23上。一对滑块13的直立边板分别固定连接着一对驱动振子11的一端,使一对驱动振子11的一对配重块114呈悬臂状;一对滑块13的水平边板分别固定连接着与一对钳位压电陶瓷片123的一端对应的钳位机构12的两端。
32.参见图6,底座机构2包括日字形的底座主体21、定位凸台212、一对导杆23。定位凸台212固定安装于底座主体21中部的横杆上,一对导杆23通过竖直支架固定安装于底座主体21相对应的两侧边上方,且平行于定位凸台212。
33.参见图7,中心安装块121的底面呈槽钢状,槽钢中部的凹槽为安装槽1212,弹性钳位片125通过预紧螺栓124固定安装于安装槽1212内;弹性钳位片125上固定安装有钳位磨
头1251。
34.本发明的工作原理详细说明如下:参见图8,通过拧紧预紧螺栓124,使弹性钳位片125带动钳位磨头1251向下压,使钳位磨头1251与底座2的定位凸台212上端面接触以产生预紧摩擦力。
35.参见图9,为钳位机构振动模态仿真结果图。钳位机构12在正弦信号的激励下,做上下往复振动,谐振频率为136.67 hz。当钳位机构12向上振动时,钳位磨头1251和定位凸台212分离,线性压电马达此时可以运动,即释放状态;当钳位机构12向下振动时,钳位磨头1251抵死在定位凸台212上,线性压电马达此时无法运动,即钳位状态。
36.参见图10,为驱动振子振动模态仿真结果图。一对驱动振子11在正弦信号的激励下往复振动,谐振频率为136.65 hz,驱动动子模块1在水平面上沿导杆23轴向有运动趋势。工作时,驱动振子11和钳位机构12协同振动,使钳位状态时的运动趋势被抵消,于是线性压电马达朝一个方向持续运动。
37.参见图11,为线性压电马达双向同步谐振运动原理图。图中演示了线性压电马达正、反两个方向运动时的驱动信号与运动原理。
[0038]ⅰ:当分别向一对动子压电陶瓷片113和一对钳位压电陶瓷片123输入相同的正弦信号,t
0-t1时间内,钳位机构为释放状态,线性压电马达在驱动振子11作用下正向运动;t
1-t2时间内,钳位机构为钳紧状态,驱动振子11所带来的反向运动趋势被抵消,马达静止。于是在一个周期内马达实现了正向连续运动。
[0039]ⅱ:当分别向一对动子压电陶瓷片113和一对钳位压电陶瓷片123输入幅值、频率相同,但相位差1/2 t的正弦信号,t
0-t1时间内,钳位机构为释放状态,线性压电马达在驱动振子11作用下反向运动;t
1-t2时间内,钳位机构为钳紧状态,驱动振子11所带来的正向运动趋势被抵消,马达静止。于是在一个周期内马达实现了反向连续运动。
[0040]
本领域的技术人员容易理解,以上仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。