1.本发明属于视觉与目标检测技术领域,具体涉及一种基于轮廓质心高度增量特征的目标识别方法。
背景技术:
2.目标识别一直是计算机视觉发展的重要研究方向。而在目标识别领域中,传统目标识别算法识别准确率低、复杂度高等问题一直是目标识别领域内的难点和热点。通常情况下,都希望识别特征能对待识别目标的环境问题具有良好的适应性,从而能够更加有效地从场景图像中识别出目标实例。因为物体的形状具有十分稳定和重要的视觉特征,所以形状一直是目标匹配中一项有效且利用率较高的特征。形状表示方法可以大体上分为三类:基于轮廓的形状表示、基于区域的形状表示和基于骨架的形状表示。基于轮廓的表示方法是在提取图像轮廓的基础上对其外部边缘进行描述。国内外学者对基于轮廓特征的目标识别方法展开了广泛研究,提出了大量描述轮廓特征的方法。
3.2001年belongie等提出的形状上下文描述符,作为近年来最具有代表性的轮廓描述方法,因识别效果良好、抗干扰性强等优势被广泛应用于形状检索领域。吴晓雨等提出一种具有旋转不变性的形状上下文识别算法,通过寻找采样点最多的角度区间的方法改变图像角度,为形状上下文描述符加入旋转不变性。张桂梅等将内部距离代替欧氏距离,提出内距离形状上下文描述符,对于存在非刚性和肢体变化的目标取得了较好的识别效果,但描述符构建复杂,计算量大。mokhtarian等提出曲率尺度空间描述符,对于边界噪声以及尺度变化具有良好的鲁棒性,但需要对轮廓进行进一步演化,增加了特征提取的工作量,且识别精度较低。alajlan等提出基于三角形区域表示的形状描述符,有效的获取了目标的全局以及局部信息,但该方法识别鲁棒性差,对相似形状的区分能力较低。
4.传统目标识别算法识别准确率低、复杂度高,且识别抗燥性低,进而到不到稳定、准确的识别效果。
技术实现要素:
5.因此,本发明要解决的技术问题在于提供一种基于轮廓质心高度增量特征的目标识别方法,能够解决传统目标识别算法识别准确率低、复杂度高,且识别抗噪性低,进而达不到稳定、准确的识别效果的问题。
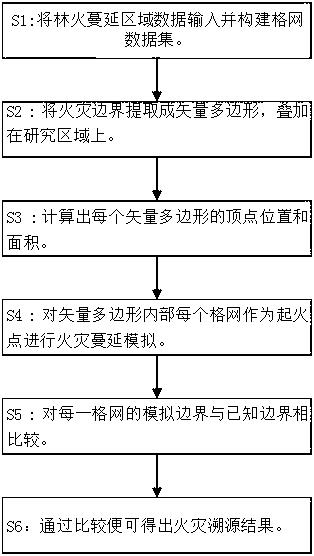
6.为了解决上述问题,本发明提供了一种基于轮廓质心高度增量特征的目标识别方法,所述方法包括下列步骤:
7.s1:建立多类目标图像和模板图像的轮廓模板数据库;
8.s2:对模板图像和目标图像分别进行图像预处理及轮廓提取,并生成轮廓点集;
9.s3:对模板图像和目标图像分别提取轮廓的质心高度增量特征,并进行归一化处理和平滑化处理;
10.s4:通过动态规划算法计算模板图像和目标图像的质心高度增量特征距离;
11.s5:通过联合动态规划算法和形状复杂度分析,共同对目标图像进行识别,得出最终的识别结果。
12.可选的,步骤s1中数据库内具体包括图像的几何变换特征和完整的图像特征。
13.可选的,步骤s2中轮廓提取,具体包括以下步骤:
14.s2.1:图像从三通道转化为单通道图像;
15.s2.2:对图像进行阈值化降噪处理;
16.s2.3:采用canny微分算子对图像进行边缘的提取;
17.s2.4:采用图像形态学运算膨胀细小边缘并填充空洞,形成完整的外围轮廓;
18.s2.5:再一次采用canny微分算子进行外围轮廓的准确提取。
19.可选的,步骤s3中,具体包括以下步骤:
20.s3.1:求取轮廓质心;
21.s3.2:通过特征提取算法提取出目标图像的质心高度增量特征:求出n个点的质心高度和n个点的质心高度增量,应用轮廓顺序排列任意采样点的质心高度增量得到质心高度增量序列,进而得到n个点的质心高度增量序列构成的质心高度增量矩阵;
22.s3.3:对轮廓采样点的质心高度增量特征进行归一化处理;
23.s3.4:对轮廓采样点的质心高度增量特征进行平滑性处理。
24.可选的,步骤s3.1中轮廓求取包括:
25.设定得到轮廓部分点集记为p={pi}(i=1,2,...,n),其中,n为采样点的个数,pi为轮廓第i个采样点;
26.设定采样点为pi(xi,yi),轮廓质心为w(x0,y0),轮廓质心计算公式如下:
27.可选的,步骤s3.2中提取目标图像的质心高度增量特征,具体包括以下步骤:
28.s3.2.1:对轮廓质心高度值的求取:求取的高度值表示采样点在轮廓上的位置,对于采样点pi(xi,yi),设定质心高度gi为该点与质心w(x0,y0)的欧氏距离,即:
29.s3.2.2:对质心高度增量的求取:根据得到的轮廓n个采样点的质心高度值,设定任一采样点pj(j=1,2,...n)与当前采样点pi的质心高度的差值为质心高度增量h
i,j
,即:h
i,j
=g
j-gi(j=1,2,...n);
30.s3.2.3:对质心高度增量序列的求取:将所有采样点相对于点pi的质心高度增量按轮廓点顺序排列,得到采样点pi的质心高度增量序列hi,即:hi=(h
i,i
,h
i,i 1
,..h
i,n
,h
i,1
,..h
i,i-1
)
t
;
31.s3.2.4:对质心高度增量矩阵的求取:将形状轮廓p上每个点对应的质心高度增量序列hi按照轮廓点顺序排列,得到一个尺寸为n
×
n的矩阵:l(p)=(h1,h2,...,h
n-1
,hn)。
32.可选的,步骤s3.3中归一化处理,使该描述符具有缩放不变性,对矩阵的每一行进行归一化处理:其中,||h
t,j
||为质心高度增量数据的模。
33.可选的,步骤s3.4中平滑性处理包括:
34.对于pi点的质心高度增量可表示为:
35.该序列包含了n个元素,对应n个采样点相对于该点的质心高度增量,加入正整数系数k(1<k<n),将该序列划分成m个不相交的子序列[1,k]、[k 1,2k]、...,其中m=[n/k],计算每个序列的质心高度增量的平均值:其中,t=1,2,...m;
[0036]
把m个均值数据进行有序排列,得到点pi经过平滑化处理后的特征序列gi,即:gi=(g
i,1
,g
i,2
,....g
i,m-1
,g
i,m
)
t
,将所有采样点平滑后的描述符按序排列,得到轮廓p的质心高度增量特征矩阵e(p):e(p)=(g1,g2,...,g
n-1
,gn)。
[0037]
可选的,步骤s4中,具体包括以下步骤:
[0038]
s4.1:计算两个形状上采样点间的匹配代价:即计算两个形状上面各一采样点之间的质心高度增量特征的距离,设计权重系数,得到两个轮廓间的匹配代价矩阵;
[0039]
s4.2:采用动态规划算法对轮廓点集进行匹配,确定对应关系,使得轮廓间每对轮廓点的匹配代价的总和最小,从而得到两个轮廓点集序列间的最优匹配代价;
[0040]
s4.3:引入形状复杂度进一步提升轮廓的匹配效果。
[0041]
可选的,步骤s4.1中对匹配代价的求取包括:
[0042]
预设采样点pi和qj分别属于形状p和q,设定匹配代价为pi、qj两点对应的质心高度增量特征gi和gj之间的距离;
[0043]
设定权重系数w
t
突出轮廓的局部特征,计算公式如式:基于权重系数,得到匹配代价c(pi,qj)的计算公式如式:
[0044]
其中,d(g
i,t
,g
j,t
)表示pi、qj两点在其质心高度增量第t个分量上的数据差值;
[0045]
步骤s4.2中对最优匹配代价的求取包括:
[0046]
获取任意两个点的匹配代价后,进行轮廓点集间的匹配,采用动态规划算法进行匹配,确定对应关系,使得轮廓间每对轮廓点的匹配代价的总和最小,设形状p的采样点pi与形状q中的采样点τ(pi)相匹配,则两个形状的距离差异定义为:其中,c(pi,τ(pi))为采样点pi和τ(pi)之间的匹配代价;
[0047]
步骤s4.3中引入形状复杂度进一步提升轮廓的匹配效果包括:
[0048]
设定形状轮廓的复杂度为:其中,std表示标准差;
[0049]
通过引入形状复杂度,得到两个形状之间的距离s(p,q):其中,c(p)和c(q)分别为形状p和q的复杂度,η为调整分母大小的参数。
[0050]
有益效果
[0051]
本发明的实施例中所提供的一种基于轮廓质心高度增量特征的目标识别方法,本发明根据轮廓点相对于质心高度的变化,构建了质心高度增量轮廓描述符,通过归一化处理和平滑化处理提高描述符对于噪声和非线性形变的鲁棒性。考虑质心高度增量的空间关
系特征,在识别过程中为识别减小特征维数从而减小算法复杂度,采用动态规划算法计算质心高度增量特征的相似度,结合轮廓的形状复杂度分析获得最终的识别结果。在目标识别准确率低的情况下,往往通过增加目标特征信息,而这也增加了识别算法的复杂度,在这种情况下,考虑到不同轮廓各自轮廓质心和轮廓点的空间位置分布关系,提高目标形状的识别准确率和抗噪性,本发明能够取得良好的识别效果,解决传统目标识别算法识别准确率低、复杂度高,且识别抗噪性低,进而达不到稳定、准确的识别效果的问题。
附图说明
[0052]
图1为本发明实施例的目标识别步骤图;
[0053]
图2为本发明实施例的目标识别流程图;
[0054]
图3为本发明实施例的动态规划算法流程图;
[0055]
图4(a)、图4(b)以及图4(c)分别为本发明实施例的目标图像、轮廓提取以及均匀采样的示意图;
[0056]
图5为本发明实施例的不相似轮廓采样点的质心高度增量特征提取效果图;
[0057]
图6为本发明实施例的测试集上的部分目标匹配结果图。
具体实施方式
[0058]
结合参见图1至图6所示,根据本发明的实施例,一种基于轮廓质心高度增量特征的目标识别方法,如图1所示,具体步骤如下:
[0059]
步骤一:图像的预处理及轮廓提取:对待测目标图像和若干模板图像进行预处理并用轮廓提取算法提取各自的外围轮廓。待测目标为不确定物体图像,模板图像为确定物体图像。
[0060]
步骤二:对轮廓进行均匀采样和质心提取:提取待测目标的外部轮廓,在外部轮廓上选取n个采样点,提取n个采样点的轮廓质心。
[0061]
步骤三:以轮廓质心为参考点,根据其他点相较于该点的高度关系建立质心高度增量描述符:对步骤二选取的采样点求取他们各自与质心的距离以及质心高度增量。
[0062]
步骤四:对质心高度增量特征进行归一化和平滑化处理:对步骤三得到的质心高度增量特征降维处理以及使其具备平移旋转不变性。
[0063]
步骤五:采用动态规划算法计算两个轮廓的特征距离:应用步骤四得到的经过处理的质心高度增量特征计算匹配代价进而计算轮廓之间的特征距离。
[0064]
步骤六:结合轮廓特征的复杂度分析筛选出最终结果:通过改变距离公式参数设定筛选出最终结果。
[0065]
本发明是根据轮廓点相对于质心高度的变化构建了质心高度增量轮廓描述符,通过归一化处理和平滑化处理提高描述符对于噪声和非线性形变的鲁棒性。采用动态规划算法计算质心高度增量特征的相似度,结合轮廓的形状复杂度分析获得最终的识别结果。进而该方法能够取得良好的识别效果,考虑到不同轮廓各自轮廓质心和轮廓点的空间位置分布关系,提高目标形状的识别准确率和抗燥性,能获得更稳定、准确的识别效果。
[0066]
进一步的,步骤一中图像的预处理及轮廓提取:对待测目标图像和若干模板图像进行预处理并用轮廓提取算法提取各自的外围轮廓。所述的待测目标为不确定物体图像,
模板图像为确定物体图像。
[0067]
步骤一中轮廓提取,具体包括以下步骤:
[0068]
1.1:图像从三通道转化为单通道图像;
[0069]
1.2:对图像进行阈值化降噪处理;
[0070]
1.3:采用canny微分算子对图像进行边缘的提取;
[0071]
1.4:采用图像形态学运算膨胀细小边缘并填充空洞,形成完整的外围轮廓;
[0072]
1.5:再一次采用canny微分算子进行外围轮廓的准确提取。
[0073]
进一步的,阈值化处理图像可以最大限度的进行图像的降噪处理;图像形态学处理可以填补目标内部细小轮廓所带来的冗余空洞,两次利用canny微分算子进行边缘轮廓的提取,最终得到图像的最外围轮廓。
[0074]
其中,步骤二包括如下步骤2.1~2.2:
[0075]
2.1:在图像外部轮廓上提取n个有效特征点;
[0076]
2.2:根据算法计算轮廓质心。
[0077]
其中,步骤三包括如下步骤3.1~3.3:
[0078]
3.1:求出采样点与质心的距离,即质心高度值;
[0079]
3.2:对质心高度增量序列的求取;
[0080]
3.3:对质心高度增量矩阵的求取。
[0081]
如图4(a)和如图4(b),进一步的,步骤2.1中轮廓特征点的提取是进行的等间隔取样,选取一定数目的轮廓点。包括如下步骤:图像轮廓提取的完整轮廓点集,选取轮廓点的数目为n,用总轮廓点数m除以所需要的点的数量n,可以得到轮廓的取样距离m/n,选取轮廓点的起点可以是随机的。由此可以得出取样点n的数量越大,描述出来的形状也就更准确。
[0082]
如图4(c),利用步骤2.2利用步骤2.1中得到轮廓部分点集记为p={pi}(i=1,2,...,n),其中n为采样点的个数,pi为轮廓第i个采样点。设采样点pi(xi,yi),轮廓质心w(x0,y0)的计算公式如下:
[0083]
进一步的,步骤3.1中要计算轮廓的质心高度增量,最重要的是求出采样点与质心的距离,即质心高度值,该值表征了采样点在轮廓上的位置,对于采样点pi(xi,yi),定义质心高度gi为该点与质心w(x0,y0)的欧氏距离,即:
[0084]
进一步的,步骤3.2中对质心高度增量的求取:根据得到的轮廓n个采样点的质心高度值,设定任一采样点pj(j=1,2,...n)与当前采样点pi的质心高度的差值为质心高度增量h
i,j
,即:h
i,j
=g
j-gi(j=1,2,...n)。
[0085]
进一步的,步骤3.2中对质心高度增量序列的求取,将所有采样点相对于点pi的质心高度增量按轮廓点顺序排列,得到采样点pi的质心高度增量序列hi,即:hi=(h
i,i
,h
i,i 1
,..h
i,n
,h
i,1
,..h
i,i-1
)
t
。
[0086]
进一步的,步骤3.3中对质心高度增量矩阵的求取,将形状轮廓p上每个点对应的质心高度增量序列hi按照轮廓点顺序排列,得到一个尺寸为n
×
n的矩阵:l(p)=(h1,h2,...,h
n-1
,hn),式中l(p)表示轮廓的质心高度增量矩阵,矩阵的第i列表示轮廓p上采样点pi的质心高度增量描述符。该描述符描述了轮廓点与点之间的相对高度关系,不随轮廓的
旋转和平移而变化。
[0087]
进一步的,步骤四中对质心高度增量特征进行归一化和平滑化处理包括如下步骤:
[0088]
为使该描述符具有缩放不变性,我们对矩阵的每一行进行归一化处理:式中||h
t,j
||为质心高度增量数据的模。
[0089]
该式定义了采样点pi相对于轮廓所有采样点的质心高度增量,这样虽然有效的描述了轮廓信息,但对噪声引起的轮廓局部变形过于敏感,同时特征维数过高、计算复杂。
[0090]
进一步的,在描述符的精确性、抗噪性、简洁性之间取得一个很好的折中,具体过程如下:
[0091]
对于pi点的质心高度增量可表示为:
[0092]
该序列包含了n个元素,对应n个采样点相对于该点的质心高度增量,加入正整数系数k(1<k<n),将该序列划分成m个不相交的子序列[1,k]、[k 1,2k]、...,其中m=[n/k],计算每个序列的质心高度增量的平均值:式中t=1,2,...m。
[0093]
进一步的,把m个均值数据进行有序排列,得到点pi经过平滑化处理后的特征序列gi,即:gi=(g
i,1
,g
i,2
,....g
i,m-1
,g
i,m
)
t
;
[0094]
经过平滑处理后,不仅提高了描述符对轮廓变形以及噪声干扰的鲁棒性,同时降低了特征向量的维度,方便后续的匹配。将所有采样点平滑后的描述符按序排列,得到轮廓p的质心高度增量特征矩阵e(p):e(p)=(g1,g2,...,g
n-1
,gn)。
[0095]
进一步的,步骤五中采用动态规划算法计算两个轮廓的特征距离包括如下步骤:
[0096]
如图2和图3所示,在步骤四获取形状的特征描述符后,计算两个形状的相似程度,由于质心高度增量描述符包含轮廓点集顺序这一全局特征,本文选取了动态规划算法对得到的形状特征进行匹配。
[0097]
质心高度增量描述符刻画的是轮廓点与点之间的特征关系,首先计算两个形状上采样点间的匹配代价,不同轮廓采样点之间的特征越相似,匹配代价越小。假设采样点pi和qj分别属于形状p和q,定义匹配代价为pi、qj两点对应的质心高度增量特征gi和gj之间的距离。考虑到接近采样点pi和qj的质心高度增量的作用更大,为此设计权重系数w
t
突出轮廓的局部特征,计算公式如下:在此基础上,得到匹配代价c(pi,qj)的计算公式如式:式中d(g
i,t
,g
j,t
)表示pi、qj两点在其质心高度增量第t个分量上的数据差值。
[0098]
在获得了任意两个点的匹配代价后,进行轮廓点集间的匹配,采用动态规划算法进行匹配,确定对应关系使得轮廓间每对轮廓点的匹配代价的总和最小,设形状p的采样点pi与形状q中的采样点τ(pi)相匹配,则两个形状的距离差异定义为:其中,c(pi,τ(pi))为采样点pi和τ(pi)之间的匹配代价。
[0099]
进一步的,步骤六中结合轮廓特征的复杂度分析筛选出最终结果主要包括以下步骤:
[0100]
由于形状的复杂度越高,对轮廓局部变形的敏感度越低,识别出的结果越具有可信性,因此引入形状复杂度进一步提升轮廓的匹配效果,定义形状轮廓的复杂度为:式中std表示标准差。
[0101]
通过引入形状复杂度最终得到两个形状之间的距离s(p,q):式中c(p)和c(q)分别为形状p和q的复杂度,η为调整分母大小的参数,根据经验可适当调整。
[0102]
此外实际识别过程中,往往会出现待识别目标存在翻转的情况,容易造成误匹配,因此采取一个简单的策略:将待检测目标p进行翻转得到形状pf,将形状p和pf分别与形状q匹配,取两者中匹配的最小距离作为形状p和q的最终匹配结果。
[0103]
如图5所示,给出了不相似轮廓采样点的质心高度增量特征提取效果图,其中图5(a)、图5(b)表示心形轮廓和蝙蝠轮廓均匀采样,分别标记了3个轮廓点a、b以及c;图5(c)、图5(e)、图5(g)分别为心形轮廓a、b、c三点对应的质心高度增量特征,图5(d)、图5(f)、图5(h)分别为蝙蝠轮廓a、b、c三点对应的质心高度增量特征。从图5可以看出,轮廓上的不同采样点,其质心高度增量特征具有唯一性,可以用来描述轮廓信息。
[0104]
如图6所示,给出了本发明在mpeg-7测试集上的部分目标匹配结果,其中第1列为待测目标,第2~9列为匹配结果以及对应的形状距离值,待测目标1st~8th的形状距离值从小到大,表示与其第1到第8相似的识别结果,可以看出本发明能够较好的实现目标形状的识别。
[0105]
本领域的技术人员容易理解的是,在不冲突的前提下,上述各有利方式可以自由地组合、叠加。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。