技术特征:
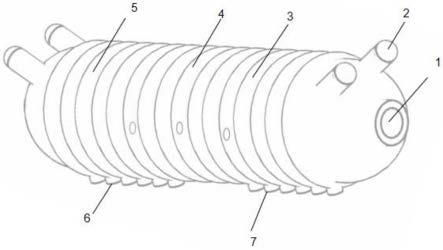
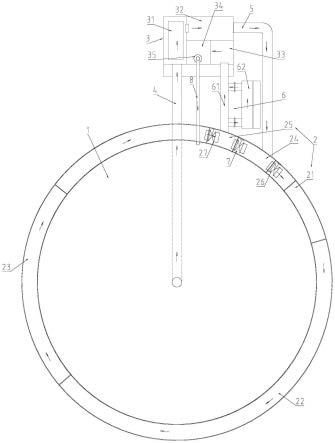
1.一种软垫爪钩复合结构的仿生软体攀爬机器人,其特征在于,所述仿生软体攀爬机器人由喷药装置、视觉识别装置、前向仿生攀爬装置、控制系统、中央伸缩致动器、后向仿生攀爬装置组成并依次粘接固连;所述喷药装置由喷药头、摇头器、第一通气软管、第二通气软管、药液盒、第三通气软管、第九微型电磁阀、第四通气软管、药液盒套、第五通气软管所组成;所述摇头器右侧设有四个盲孔,分别与第一通气软管、第二通气软管、第四通气软管、第五通气软管连接,四个盲孔中间设有通孔,与所述药液盒套固定连接;药液盒套为t型圆柱套,一侧设有螺纹,与所述喷药头进行螺纹连接,一侧设有法兰,与所述药液盒的法兰盘通过螺栓进行连接;所述第九微型电磁阀一侧设有螺纹,与药液盒带有螺纹的通孔进行螺纹连接,另一侧与所述第三通气软管连接;所述视觉识别装置由微型相机以及仿触角状支架组成,微型相机安装在仿触角状支架上;所述前向仿生攀爬装置、后向仿生攀爬装置为两结构相同的组件,均为软垫爪钩复合结构,前向仿生攀爬装置由第一腔致动器、第六通气软管、前向仿生攀爬足所组成;后向仿生攀爬装置由第二腔致动器、第七通气软管、后向仿生攀爬足所组成;所述第一腔致动器为封闭腔体,第一腔致动器与第六通气软管相连且气源通过第六通气软管向第一腔致动器内充气和放气;所述第二腔致动器为封闭腔体,第二腔致动器与第七通气软管相连且气源通过第七通气软管向第二腔致动器内充气和放气;前向仿生攀爬足和后向仿生攀爬足在未充气时处于缩进状态,在充气时为伸展状态;所述控制系统由安装板、微型锂离子电池、微型单片机、微型气泵、微型压力调节阀、第一微型电磁阀、第二微型电磁阀、第三微型电磁阀、第四微型电磁阀、第五微型电磁阀、第六微型电磁阀、第七微型电磁阀、第八微型电磁阀组成,所述微型电磁阀都为两位三通电磁阀;所述安装板为长方体薄板结构,安装板上开有螺纹孔,分别与微型锂离子电池、微型单片机、微型气泵、微型压力调节阀、第一微型电磁阀、第二微型电磁阀、第三微型电磁阀、第四微型电磁阀、第五微型电磁阀、第六微型电磁阀、第七微型电磁阀、第八微型电磁阀固定连接;所述微型锂离子电池分别为微型相机、微型单片机、微型气泵、微型压力调节阀、第一微型电磁阀、第二微型电磁阀、第三微型电磁阀、第四微型电磁阀、第五微型电磁阀、第六微型电磁阀、第七微型电磁阀、第八微型电磁阀、第九微型电磁阀电性提供电源;所述微型压力调节阀的一端通过硅胶软管与微型气泵连接,另一端通过硅胶软管、气管接头分别与第一微型电磁阀、第二微型电磁阀、第三微型电磁阀、第四微型电磁阀、第五微型电磁阀、第六微型电磁阀、第七微型电磁阀、第八微型电磁阀连接组成气源系统,通过微型气泵使气源系统实现充、放气,通过微型压力调节阀实现气源系统的压力调节;所述第一微型电磁阀与第一通气软管连接并对其进行通气和放气、第二微型电磁阀与第二通气软管相连并对其进行通气和放气、第三微型电磁阀与第三通气软管相连并对其进行通气和放气、第四微型电磁阀与第四通气软管相连并对其进行通气和放气、第五微型电磁阀与第五通气软管相连并对其进行通气和放气、第六微型电磁阀与前向仿生攀爬装置的第六通气软管相连并对其进行通气和放气、第七微型电磁阀与后向仿生攀爬装置的第七通气软管相连并对其进行通气和放气、第八微型电磁阀与中央伸缩致动器的第八通气软管连
接并对其进行通气和放气;所述中央伸缩致动器由波纹管、复位腔体、第八通气软管所组成;所述波纹管为封闭管体,波纹管与第八通气软管相连且气源通过第八通气软管向波纹管内充气和放气,所述复位腔体固连在波纹管外表面上,且波纹管能在复位腔体的带动下进行复位。2.如权利要求1所述的一种软垫爪钩复合结构的仿生软体攀爬机器人,其特征在于,所述微型单片机为模块组件,有无线收发、视觉检测识别功能。3.如权利要求1所述的一种软垫爪钩复合结构的仿生软体攀爬机器人,其特征在于,所述喷药头为内陷结构,内部受到10kpa以上压力时才能开启;所述摇头器为柔性体,通过控制第一通气软管、第二通气软管、第四通气软管、第五通气软管的通气组合实现换向器向各个方向的转动。4.如权利要求1所述的一种软垫爪钩复合结构的仿生软体攀爬机器人,其特征在于,所述第九微型电磁阀为单向电磁阀,与药液盒、第三通气软管连接时按气体从第三通气软管、微型电磁阀、药液盒的通气顺序进行连接。5.如权利要求1所述的一种软垫爪钩复合结构的仿生软体攀爬机器人,其特征在于,所述前向仿生攀爬装置和后向仿生攀爬装置通过模具浇注制备,一体成型;所述前向仿生攀爬足和后向仿生攀爬足为多个带有软垫爪钩复合结构的仿生攀爬足组成;所述软垫爪钩复合结构是由在软体吸盘表面设置有一定构型的爪钩阵列所组成。6.如权利要求5所述的一种软垫爪钩复合结构的仿生软体攀爬机器人,其特征在于,所述爪钩为卧式l形状,通过感知第一腔致动器和第二腔致动器内部充气压强控制缩进及伸展状态,由abs材料制备而成。7.如权利要求5所述的一种软垫爪钩复合结构的仿生软体攀爬机器人,其特征在于,所述软体吸盘由ds-m型号粘性硅胶制备而成,粘合固定在机器人腹部第一致动器和第二致动器处,软体吸盘在机器人腹部呈两列对称分布。8.如权利要求1所述的一种软垫爪钩复合结构的仿生软体攀爬机器人,其特征在于,所述中央伸缩致动器以波纹管为型芯,通过模具浇注制备,一体成型,并在波纹管的两端用热熔胶密封处理。9.如权利要求1所述的一种软垫爪钩复合结构的仿生软体攀爬机器人,其特征在于,药液盒、药液盒套、安装板选用柔韧性好的铝、铜、镍等金属薄片制作;复位腔体、摇头器选用elastosil m4601硅胶材料;波纹管选用商用的聚丙烯材料哨子吸管。
技术总结
本发明涉及柔性机器人,具体为一种软垫爪钩复合结构的仿生软体攀爬机器人。本发明在无辅助支撑工具的环境下实现自主攀爬运动,同时可以借助机器视觉实现对果树花朵、树木病害位置的定位,进而完成定向施药操作。从制作方面,采用了波纹管嵌入硅胶的方法制作伸缩致动器,制备工艺简单,控制灵活。同时喷药装置、控制系统全部都集成到机器人上,使得整个机器人结构紧凑。结构方面,采用软垫爪钩复合结构,机器人在水平树枝上爬行时以软垫吸附为主,在垂直树干表面攀爬时爪钩伸出,提高机器人的承载能力和环境适应能力,并且本发明设计合理,结构简单,易于制作和控制。易于制作和控制。易于制作和控制。
技术研发人员:程广贵 尹行 单畅 丁建宁 李章炜 张忠强
受保护的技术使用者:江苏大学
技术研发日:2022.04.26
技术公布日:2022/7/29
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。