一种改进的联合协方差矩阵和admm算法的稳健波束形成方法
技术领域
1.本发明涉及阵列信号处理技术领域,尤其涉及一种改进的联合协方差矩阵和admm算法的稳健波束形成方法。
背景技术:
2.在阵列信号处理中,鲁棒自适应波束形成已经公认为一个基本问题,并引起了广泛的研究与关注。这是因为传统的自适应波束形成技术,对假定的和实际的信号导向矢量之间的微小或适度差异,以及天线校准误差和其他不匹配的免疫力较差。
3.自适应波束形成在声呐、雷达、生物科学、语音信号处理以及医学工程等领域已经得到了广泛应用,是阵列信号处理领域中的研究热点之一。自适应波束形成算法对导向矢量失配的误差非常敏感,即使很小的导向矢量误差,如方向误差、阵列扰动和运动目标等因素,都会使算法性能急剧下降。另外,当训练数据中含有期望信号时,期望信号可能被当作干扰信号,产生自消现象。传统的波束形成算法在干扰处形成的零陷非常窄,如出现阵列扰动时,必然会导致干扰偏离零陷位置,甚至会导致算法完全失效。因此有必要研究增强算法的稳健性来克服上述问题。
4.对此,为了有效提高传统波束形成器在干扰位置发生扰动和导向矢量失配下的算法性能,提出一种改进的联合协方差矩阵重构和admm算法的稳健波束形成方法。
5.增强算法的稳健性大致可以分为两类:一类是基于协方差矩阵的算法:对角加载(diagnoal loading,dl)算法、特征空间算法、以及协方差矩阵重构算法(interference plus noise,ipn)。dl算法就是在协方差矩阵的对角线上加入一个加载因子,从而抑制权向量中的噪声,但是最优加载因子的选取很难确定。特征空间算法是通过求解协方差矩阵的特征值,并对其进行划分,大特征值对应的导向矢量张成的是期望信号加干扰信号的子空间,小特征值对应导的向矢量张成的则是噪声子空间。再将存在误差的期望信号向期望信号加干扰信号的子空间进行投影,进而消除误差。
6.因此,为了满足鲁棒性要求,建立了许多鲁棒自适应波束形成技术。
技术实现要素:
7.本发明要解决的技术问题在于针对现有技术中的缺陷,提供一种改进的联合协方差矩阵和admm算法的稳健波束形成方法。
8.本发明解决其技术问题所采用的技术方案是:
9.本发明提供一种改进的联合协方差矩阵和admm算法的稳健波束形成方法,该方法包括以下步骤:
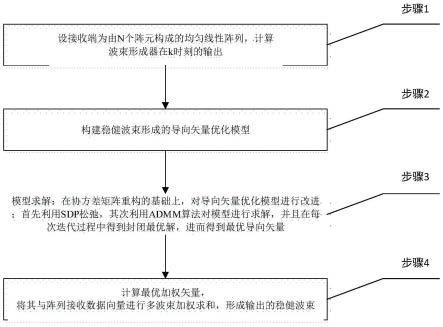
10.步骤1、设接收端为由n个阵元构成的均匀线性阵列,波束形成器在k时刻的输出为:y(k)=whx(k);其中,w是n
×
1的加权矢量,(
·
)h表示共轭转置,x(k)为阵列接收数据向量;
11.步骤2、构建稳健波束形成的导向矢量优化模型:
[0012][0013][0014]
n(1-η1)≤||a||2≤n(1 η2)
[0015]
||a-a0||2≤ε
[0016]
其中,协方差矩阵为:其中,协方差矩阵为:δ0表示为:
[0017][0018][0019]
其中,定义d(θ)为θ方向的相关导向矢量,θ=[θ
min
,θ
max
]表示期望信号在定义的区间内,假设失配区间小于θ且与干扰信号角度分离,表示θ的补集;k为快拍数;a为阵列导向矢量,a0=d(θ0),θ0=(θ
min
θ
max
)/2为定义区间θ=[θ
min
,θ
max
]的中间值;η1、η2和ε均为定义的参数,为允许的误差范数界限;
[0020]
步骤3、模型求解:在协方差矩阵重构的基础上,对导向矢量优化模型进行改进;首先利用sdp松弛,其次利用admm算法对模型进行求解,并且在每次迭代过程中得到封闭最优解,进而得到最优导向矢量a
*
;
[0021]
步骤4、计算最优加权矢量:将其与阵列接收数据向量x(k)进行多波束加权求和,形成输出的稳健波束。
[0022]
进一步地,该方法中干扰加噪声的协方差矩阵为:
[0023][0024]
其中,为capon算法的空间功率谱;
[0025]
令干扰区域范围其中,δδ为所需的零陷范围,则重构的干扰协方差矩阵为:
[0026][0027]
于是,重构的干扰加噪声协方差矩阵如下:
[0028][0029]
其中,为噪声功率;选为对特征分解对应的最小特征值,a(θ)表示导向矢量、θi表示干扰信号方向、δδi表示定义的零陷宽度、p表示划分干扰区间精度总数。
[0030]
进一步地,该方法中sdp松弛的方法为:
[0031]
导向矢量优化模型的全局最优解通过相应的sdp松弛问题的最优解给出:
[0032]
[0033][0034]
n(1-η1)≤trx≤n(1 η2)
[0035][0036][0037]
改写为:
[0038][0039][0040][0041][0042][0043]
根据内点法,表示为:
[0044]
mintr(c
t
y)
[0045]
s.t.tr(qy)≤p
[0046][0047]
其中,p1=δ0,p2=n(1 η2),p3=n(η
1-1),p4=ε,
[0048][0049]
x是一个n
×
n的hermitian矩阵,y为构造的sdp松弛模型的最优解,没有特定的物理意义,i代表单位矩阵;
[0050]
使用拉格朗日方法将问题的目标与问题的约束条件放到一个函数里面,得到式:
[0051][0052]
其中,m’表示参与累加的q、p的序号;
[0053]
根据障碍函数思想,令得到式:
[0054][0055]
其中,t为用于调整近似的参数;对上式分别求解一阶以及二阶导数,调整t的值,使其收敛,得到最优x
*
;
[0056]
令于是导向矢量优化模型转化为:
[0057][0058][0059]
||a||2=b2[0060]
||a-a0||2≤ε
[0061]
由于,||a
*-a
0h
a0||2=a
*h
(i-a0a
0h
)a
*
≤||a-a0||2≤ε,其中a
*
也是sdp松弛问题的最优解,所以将sdp松弛问题重新表示为新的优化问题:
[0062][0063][0064]
||a||2=b2[0065]ah
ba≤ε
[0066]
其中,b=i-a0a
0h
。
[0067]
进一步地,该方法中利用admm算法求解的方法为:
[0068]
引入辅助变量z,h,代入新的优化问题中得:
[0069][0070][0071]hh
a=b2[0072]hh
ba z=ε
[0073]
h-a=0
[0074]
z≥0
[0075]
利用admm的缩放形式解决上式,并根据admm框架,引入辅助变量s,u,m,v,则上式的增广拉格朗日函数为:
[0076][0077]
其中,ρ1,ρ2,ρ3,ρ4》0为惩罚系数;
[0078]
利用admm通过如下循环方式得到封闭解,在第(n 1)次迭代过程中,{a,h,z,s,u,m,v}的更新分别如下:
[0079][0080][0081][0082][0083]un 1
=un (h
n 1
)
han 1-b2[0084]mn 1
=mn (h
n 1
)hba
n 1
z
n 1-ε
[0085]vn 1
=vn h
n 1-a
n 1
[0086]
求解过程如下:
[0087]
1)更新h:
[0088]
对于给定{an,zn,sn,un,mn,vn},h的更新通过求解以下问题来获得:
[0089][0090]
为了获得上式的最小值,对上式求解关于h的一阶导,并使得导数为零,即解得:
[0091]hn 1
=γ-1
φ
[0092]
其中,γ和φ的定义分别如下:
[0093][0094][0095]
2)更新a:
[0096]
对于给定{h
n 1
,zn,sn,un,mn,vn},a的更新通过求解以下问题来获得:
[0097][0098]
同理,对上式中四项分别求导,并且令解得:
[0099]an 1
=π-1
ψ
[0100]
其中,π和ψ的定义如下:
[0101][0102][0103]
3)更新z:
[0104]
对于给定{a
n 1
,h
n 1
,sn,un,mn,vn},z的更新通过求解以下问题来获得:
[0105][0106]
s.t z≥0
[0107]
对上式求导并令其为0,解得z
n 1
=ε-m
n-h
n 1
ba
n 1
,所以:
[0108]zn 1
=max{0,ε-m
n-h
n 1
ba
n 1
}。
[0109]
本发明产生的有益效果是:本发明的改进的联合协方差矩阵和admm算法的稳健波束形成方法,通过对功率最大化问题引入更多实际约束,提高了性能。为了找到最优导向矢量,增加了双边范数扰动约束以及二次相似性约束,确保soi的到达方向远离干扰导向矢量的所有线性组合的doa区域,保证了最优导向矢量的doa位于soi的角扇形区域。结果表明,阵列输出功率最大化问题是一个具有非齐次约束的非凸二次约束二次规划问题,本发明的方法证明了这个问题仍然是可解的,并且利用admm找到了最优导向矢量,实现了稳健波束的形成;本发明更好的满足了鲁棒性要求,有效提高传统波束形成器抗干扰运动能力、抗导向矢量失配能力,同时有效改善了低输入snr情况下输出sinr的情况,以及有效防止“自消”现象的产生。
附图说明
[0110]
下面将结合附图及实施例对本发明作进一步说明,附图中:
[0111]
图1是不同失配角度情况下不同算法的归一化波束图比较;(a)估计角度(b)估计角度
[0112]
图2是输出sinr随输入snr的变化;(a)估计角度(b)估计角度
[0113]
图3是输出sinr随快拍数变化情况;
[0114]
图4是不同失配角度下输出sinr变化情况;
[0115]
图5是本发明的方法流程图。
具体实施方式
[0116]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
[0117]
一、信号模型构建;
[0118]
不失一般性,本发明实施例考虑接收端是由n个阵元构成的均匀线性阵列(ula),其阵元间距为d,于是窄带波束形成器在k时刻的输出为
[0119]
y(k)=whx(k)
ꢀꢀ
(1)
hard问题,首先利用sdp松弛,其次利用admm算法对模型进行求解,并且在每次迭代过程中得到封闭最优解,再根据式(4)求得最优加权矢量。
[0140]
qcqp问题,即式(7)是可解的,它的全局最优解可以通过相应的sdp松弛问题的最优解给出。
[0141][0142]
并且,式(8)可以改写为:
[0143][0144]
根据内点法,式(9)可以表示为:
[0145][0146]
其中,p1=δ0,p2=n(1 η2),p3=n(η
1-1),p4=ε原始问题可以表示为
线性规划的一般形式。使用拉格朗日方法将问题的目标与问题的约束条件放到一个函数里面,得到式:
[0147][0148]
根据障碍函数思想,令得到式(12)
[0149][0150]
其中,t为用于调整近似的参数;
[0151]
最后对式(12)分别求解一阶以及二阶导数,调整t的值,使得式(12)收敛,得到最优x
*
。
[0152]
令于是式(7)转化为
[0153][0154]
由于,||a
*-a
0h
a0||2=a
*h
(i-a0a
0h
)a
*
≤||a-a0||2≤ε,其中a
*
也是式(8)的最优解,所以式(8)可以重新表示为新的优化问题:
[0155][0156]
其中,b=i-a0a
0h
。
[0157]
针对式(14),利用admm算法进行求解。首先,引入辅助变量z,h,代入式(14)得:
[0158][0159]
利用admm的缩放形式解决式(15),并根据admm框架,引入辅助变量s,u,m,v,则式(15)的增广拉格朗日函数为
[0160][0161]
其中,ρ1,ρ2,ρ3,ρ4》0为惩罚系数。
[0162]
一般来说,在admm中,原始变量的更新是通过最小化增广拉格朗日乘子获得的,而拉格朗日乘子的更新是通过对偶上升方法获得。基于式(16),利用admm可通过如下循环方式得到封闭解。在第(n 1)次迭代过程中,{a,h,z,s,u,m,v}的更新分别如下
[0163][0164][0165][0166][0167]un 1
=un (h
n 1
)
han 1-b2ꢀꢀ
(21)
[0168]mn 1
=mn (h
n 1
)hba
n 1
z
n 1-ε
ꢀꢀ
(22)
[0169]vn 1
=vn h
n 1-a
n 1
ꢀꢀ
(23)
[0170]
下面将具体考虑式(17)、式(18)和式(19)的求解。
[0171]
1、更新h:
[0172]
对于给定{an,zn,sn,un,mn,vn},h的更新通过求解以下问题来获得
[0173][0174]
为了获得式(24)的最小值,本文对式(24)求解关于h的一阶导,并使得导数为零,即解得
[0175]hn 1
=γ-1
φ
ꢀꢀ
(25)
[0176]
其中,γ和φ的定义分别如下
[0177][0178][0179]
2、更新a:
[0180]
对于给定{h
n 1
,zn,sn,un,mn,vn},a的更新可以通过求解以下问题来获得
[0181][0182]
同理,对式(28)中四项分别求导,并且令解得
[0183]an 1
=π-1
ψ
ꢀꢀꢀ
(29)
[0184]
其中,ω和ξ的定义如下
[0185][0186][0187]
3、更新z:
[0188]
对于给定{a
n 1
,h
n 1
,sn,un,mn,vn},z的更新可以通过求解以下问题来获得
[0189][0190]
对式(32)求导并令其为0,解得z
n 1
=ε-m
n-h
n 1
ba
n 1
,所以
[0191]zn 1
=max{0,ε-m
n-h
n 1
ba
n 1
}
ꢀꢀ
(33)
[0192]
综上,本发明实施例提出了一种基于协方差矩阵重构和admm的零陷展宽鲁棒波束形成方法。
[0193]
三、仿真实验;
[0194]
为了验证所提方法的有效性,仿真实验验证存在干扰、杂波和导向矢量失配情况下,dl算法、smi算法、与本发明方法的性能分析对比。实验中阵元数为n=10,输入snr=10db,两个干扰的预设零陷宽度分别为δδ1=8
°
和δδ2=5
°
;假设实际期望方向角度为θ0=10
°
,期望信号采样区域θ为干扰信号的实际方位角为θ
i1
=-40
°
、θ
i2
=70
°
,干扰信号采样区域为[θ
i1-8
°
,θ
i1
8
°
]、[θ
i2-5
°
,θ
i2
5
°
]。采样点数均为100,所有结果均由100次独立的蒙特卡洛实验统计获得。
[0195]
实验1存在指向误差时,不同算法的归一化波束图比较;
[0196]
在该实验中,当前实际期望方向角度为θ0=10
°
,假设估计的期望方向角度为和inr=10db。图1给出了在不同失配角度情况时波束图比较。从图1可以看出,当失配角度为8
°
和5
°
时,改进后的算法可以矫正失配的导向矢量。此外,改进后的算法不论是在零陷处,还是在旁瓣,输出电平也均低于本发明的算法。综上可知,所提算法还是很好的提高了抗系统误差的鲁棒性。
[0197]
实验2不同输入snr下输出sinr分析;
[0198]
在该实验中,实验条件同实验2。图2对比分析了不同输入snr对输出sinr的影响。可以看出smi和dl算法无法解决导向矢量失配的问题,所以性能远偏离了理论最优值,改进后的算法可以进行导向矢量的校正,因此在估计角度为8
°
和5
°
时,输出的snir性能都比较好。改进后的算法在低snr输入的情况下,保证了较好的sinr输出,使得阵列系统受snr的影响较小,更为稳定。综上可知,改进后的算法在角度失配和干扰扰动情况下,可保持其稳定性,性能优于其他算法,并且改进后的算法在低输入sinr的性能更优。
[0199]
实验3不同快拍数下输出sinr分析;
[0200]
当前实际期望方向角度为,估计的期望方向角度为,两个干扰零陷的宽度分别为8
°
和5
°
,输入snr=30db。图3给出了输出sinr随快拍数变化情况。smi算法均在快拍数大于30时趋近收敛,dl算法受快拍影响较大。改进后的算法明显优于其余对比算法,在低快拍数
的情况下,也能输出高sinr,且是最接近理论最优值的。
[0201]
实验4不同失配角度下输出sinr分析;
[0202]
当前实际期望方向角度为,输快拍数n=100,两个干扰零陷的宽度分别为8
°
和5
°
,输入snr=30db,失配角度从-8
°
到8
°
进行变化,每种快拍数进行100次的独立实验。由图4可知,当失配角度较大时,改进后的算法可以输出接近最优值的sinr,性能明显优于其他对比算法。综上所述,所提算法可校正导向矢量,并且输出接近最优值的信噪比。
[0203]
应当理解的是,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,而所有这些改进和变换都应属于本发明所附权利要求的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。