1.本发明涉及智能洗菜技术领域,具体是指一种洗菜机器人智能识别方法。
背景技术:
2.农药残留问题是随着农药大量生产和广泛使用而产生的。第二次世界大战以前,农业生产中使用的农药主要是含砷或含硫、铅、铜等的无机物,以及除虫菊酯、尼古丁等来自植物的有机物。第二次世界大战期间,人工合成有机农药开始应用于农业生产。到目前为止,世界上化学农药年产量近200万吨,约有1000多种人工合成化合物被用作杀虫剂、杀菌剂、杀藻剂、除虫剂、落叶剂等类农药。农药尤其是有机农药大量施用,造成严重的农药污染问题,成为对人体健康的严重威胁。
3.而人工手洗食材,无法保证清洗程度,而洗菜机人配备水触媒技术,对食材进行净化和去农残操作,使蔬菜清洗达到规范,同时现有的洗菜机无法对菜品进行对比和识别,无法识别出菜品,不能对不同的菜品进行清洗程序,我们发明了洗菜机器人ai智能识别,用来识别洗槽内食材同时对菜品进行识别,针对不同的菜品启动不同的清洗模式,对是否使用水触媒进行净化去农残以及持续时间是否达标进行监管。
技术实现要素:
4.本发明要解决上述技术问题,提供一种洗菜机器人智能识别方法。
5.为解决上述技术问题,本发明提供的技术方案为:
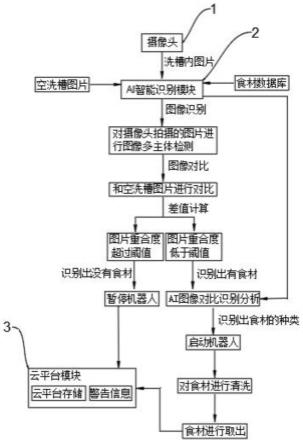
6.一种洗菜机器人智能识别方法,包括摄像头、ai智能识别模块、云平台模块和洗菜机器人,洗菜机器人智能识别方法步骤如下:
7.s1:获取图像信息,传输给ai智能识别模块,空洗槽图片和食材数据库导入ai智能识别模块;
8.s2:图片处理,对s1步骤中的图像信息进行图像识别、图像对比、图像的差值计算
9.和确定阈值,
10.s3:通过ai图像对比识别分析识别出食材的种类,洗菜机器人根据食材的种类进行工作,根据阈值处于阈值区域判断是否驱动洗菜机器人工作进行清洗食材;
11.s4:数据存储,对图片上传至云平台模块,洗菜机器人没有工作,记录警告信息并发出警告。
12.采用以上结构后,本发明具有如下优点:
13.洗菜机器人通过ai智能识别模块对摄像头拍摄洗槽内图片进行图像识别和图像对比,用来识别洗槽内是否有食材,是否启动洗菜机器人,让洗菜机器人对食材进行清洗,保证清洗程度,清洗食材更加健康,对清洗进行监管。
14.作为改进,所述的获取图像信息为空洗槽图片和摄像头拍摄洗槽内图片。
15.作为改进,所述的图像识别为对图像进行图像多主体检测。
16.作为改进,所述的云平台模块包括云平台存储和警告信息。
17.作为改进,所述的图像对比为空洗槽图片和摄像头拍摄洗槽内图片进行对比,图像的差值计算为空洗槽图片和摄像头拍摄洗槽内图片重合度计算。
附图说明
18.图1是本发明一种洗菜机器人智能识别方法的流程图。
19.如图所示:1、摄像头,2、ai智能识别模块,3、云平台模块。
具体实施方式
20.下面结合附图对本发明做进一步的详细说明。
21.结合附图1,一种洗菜机器人智能识别方法,包括摄像头1、ai智能识别模块2、云平台模块3和洗菜机器人,洗菜机器人智能识别方法步骤如下:
22.s1:获取图像信息,传输给ai智能识别模块,空洗槽图片和食材数据库导入ai智能识别模块;
23.s2:图片处理,对s1步骤中的图像信息进行图像识别、图像对比、图像的差值计算和确定阈值,
24.s3:通过ai图像对比识别分析识别出食材的种类,洗菜机器人根据食材的种类进行工作,根据阈值处于阈值区域判断是否驱动洗菜机器人工作进行清洗食材;
25.s4:数据存储,对图片上传至云平台模块,洗菜机器人没有工作,记录警告信息并发出警告。
26.所述的获取图像信息为空洗槽图片和摄像头拍摄洗槽内图片。
27.所述的图像识别为对图像进行图像多主体检测,对ai智能识别模块2进行导入食材数据,对摄像头1拍摄的图像进行图像多主体检测,检测出图片中是否有多个主体,并给出时间、位置、标签和种类,并记录数据传输至云平台模块3的云平台存储内。
28.在具体实施中,摄像头1的安装位置为洗槽的正上方。
29.所述的云平台模块3包括云平台存储和警告信息。
30.所述的图像对比为空洗槽图片和摄像头拍摄洗槽内图片进行对比,图像的差值计算为空洗槽图片和摄像头拍摄洗槽内图片重合度计算。阈值区域为空洗槽图片和摄像头拍摄洗槽内图片重合度,空洗槽图片在ai智能识别模块2内进行图像识别,对空洗槽图片进行图像多主体检测并记录在案,并把摄像头拍摄洗槽内图片的图像多主体检测和空洗槽图片的多主体检测进行图片对比,重合度计算,阈值区域为0%-79%和80%-100%两组数据范围,如重合度计算的阈值在0%-79%内则重合度低,洗槽内有食材,确定洗槽内有食材后,通过ai图像对比识别分析识别出食材的种类,洗菜机器人根据食材的种类,进行工作,洗菜机器人可对不同的食材的种类进行调节清洁的力度,反之在80%-100%内则洗槽内没有食材。
31.实施例一:
32.s1:获取图像信息,摄像头1拍摄洗槽的图片,传输至ai智能识别模块2内;
33.s2:图片处理,对s1步骤中的图像信息进行图像识别、图像对比、图像的差值计算和确定阈值,图像识别对摄像头1拍摄的图片进行图像多主体检测,检测出图片中是否有多个主体,并给出时间、位置、标签和种类,并记录数据传输至云平台模块3的云平台存储内,
图像对比把摄像头拍摄洗槽内图片的图像多主体检测和空洗槽图片的多主体检测进行图片对比,重合度计算,确定阈值为26%;
34.s3:洗菜机器人工作,阈值为26%位于0%-79%的范围内,重合度低,判断洗槽内有食材,通过ai图像对比识别分析识别出食材的种类,如是西红柿,洗菜机器人根据西红柿,进行工作,洗菜机器人可对西红柿进行调节清洁的力度,对西红柿进行清洗,洗菜机器人工作进行清洗食材,洗菜机器人为现有技术;
35.s4:数据存储,对摄像头拍摄洗槽内图片的数据进行上传至云平台模块3内存储。
36.实施例二:
37.s1:获取图像信息,摄像头1拍摄洗槽的图片,传输至ai智能识别模块2内;
38.s2:图片处理,对s1步骤中的图像信息进行图像识别、图像对比、图像的差值计算和确定阈值,图像识别对摄像头1拍摄的图片进行图像多主体检测,并记录数据传输至云平台模块3的云平台存储内,图像对比把摄像头拍摄洗槽内图片的图像多主体检测和空洗槽图片的多主体检测进行图片对比,重合度计算,确定阈值为91%;
39.s3:洗菜机器人工作,阈值为91%位于80%-100%的范围内,重合度高,判断洗槽内没有食材,洗菜机器人不工作;
40.s4:数据存储,对摄像头拍摄洗槽内图片的数据进行上传至云平台模块3内存储,并保留告警信息和发出警告。
41.以上对本发明及其实施方式进行了描述,这种描述没有限制性,附图中所示的也只是本发明的实施方式之一,实际的结构并不局限于此。总而言之如果本领域的普通技术人员受其启示,在不脱离本发明创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。