1.本技术涉及光学成像技术领域,具体涉及一种螺旋形驱动信号调制装置及方法、成像系统。
背景技术:
2.基于压电陶瓷管驱动光纤扫描成像的多光子荧光内窥镜,需要对压电陶瓷扫描器施加两轴交流调制信号,以驱动光纤在二维平面中实现一定面积的扫描。常见的扫描方案包括螺旋形扫描、栅格扫描和李萨茹扫描,而相较于李萨茹和栅格扫描,螺旋形扫描更适用于压电陶瓷管扫描光纤内窥镜装置。
3.相关技术中,螺旋形轨迹扫描的驱动信号的调制方式多为斜坡型辐度调制,这种驱动信号下的扫描分为扫描成像阶段和阻尼复位阶段,阻尼复位阶段即在扫描完成后需要通过反向阻尼信号将光纤复位。然而,复位过程中光纤驱动信号生成较为复杂,且复位阶段无法进行成像,导致极限成像帧率较低。
技术实现要素:
4.有鉴于此,本技术的目的在于克服现有技术中螺旋形轨迹扫描的驱动信号生成较为复杂、极限成像帧率较低的技术问题,提供一种螺旋形驱动信号调制装置及方法、成像系统。
5.为实现以上目的,本技术采用如下技术方案:
6.本技术的第一方面提供一种螺旋形驱动信号调制装置,包括:
7.获取模块,用于获取原始信号和调制参数;
8.调制模块,用于根据所述调制参数对所述原始信号进行信号分配和正弦参数调节,以获得第一轴驱动信号和第二轴驱动信号,所述正弦参数调节包括幅度参数调节、频率参数调节和相位差参数调节中的至少一种。
9.可选的,在所述根据所述调制参数对所述原始信号进行信号分配和正弦参数调节时,所述调制模块,用于:
10.将所述原始信号和所述调制参数带入预设公式中,以计算获取所述第一轴驱动信号和所述第二轴驱动信号;所述预设公式包括:
[0011][0012]
式中,v
x
和vy分别为所述第一轴驱动信号和所述第二轴驱动信号,a
x
为所述第一轴驱动信号的幅度参数,ay为所述第二轴驱动信号的幅度参数,f为驱动光纤振动频率参数,t为所述原始信号的震荡时间,n为单幅影像中的扫描圈数,ω0为相位差参数。
[0013]
可选的,所述调制参数包括:幅度参数、频率参数和相位差参数;所述调制模块包
括频率调节子模块、相位差调节子模块、第一轴正弦波幅度调节子模块和第二轴正弦波幅度调节子模块;
[0014]
所述频率调节子模块,用于基于所述频率参数,调节所述原始信号的频率,得到驱动信号,并发送给所述相位差调节子模块;
[0015]
所述相位差调节子模块,用于基于所述相位差参数,对所述驱动信号进行调节,得到存在相位差的第一轴调节驱动信号和第二轴调节驱动信号,并发送所述第一轴调节驱动信号给所述第一轴正弦波幅度调节子模块,发送所述第二轴调节驱动信号给所述第二轴正弦波幅度调节子模块;
[0016]
所述第一轴正弦波幅度调节子模块,用于基于所述幅度参数对所述第一轴调节驱动信号进行正弦波调制与信号幅度调节,得到所述第一轴驱动信号;
[0017]
所述第二轴正弦波幅度调节子模块,用于基于所述幅度参数对所述第二轴调节驱动信号进行正弦波调制与信号幅度调节,得到所述第二轴驱动信号。
[0018]
可选的,所述频率参数包括扫描相位间等待步数;所述频率调节子模块包括正弦波频率调节计数器;
[0019]
所述正弦波频率调节计数器,用于基于所述扫描相位间等待步数对所述原始信号进行频率调节,得到所述驱动信号,并输出给所述相位差调节子模块。
[0020]
可选的,所述频率参数还包括倍频系数;所述频率调节子模块还包括锁相环分频器;
[0021]
所述锁相环分频器,用于基于所述倍频系数对所述原始信号进行分频,得到分频信号,并输出给所述正弦波频率调节计数器;
[0022]
所述正弦波频率调节计数器,用于基于所述扫描相位间等待步数对所述分频信号进行频率调节,得到所述驱动信号,并输出给所述相位差调节子模块。
[0023]
可选的,所述相位差参数包括单周期扫描相位步数和双通道计数差值数量;所述相位差调节子模块包括正弦波相位计数器和两轴驱动信号相位差调节器;
[0024]
所述正弦波相位计数器,用于基于所述单周期扫描相位步数对所述驱动信号进行计数调整,得到所述第一轴调节驱动信号,并分别发送给所述两轴驱动信号相位差调节器和所述第一轴正弦波幅度调节子模块;
[0025]
所述两轴驱动信号相位差调节器,用于基于所述双通道计数差值数量对所述第一轴调节驱动信号进行相位差调整,得到所述第二轴调节驱动信号,并发送给所述第二轴正弦波幅度调节子模块。
[0026]
可选的,所述幅度参数包括扫描圈数;所述第一轴正弦波幅度调节子模块包括第一正弦波生成器、第一正弦型幅度调制器和第一信号输出幅度调节器;所述第二轴正弦波幅度调节子模块包括第二正弦波生成器、第二正弦型幅度调制器和第二信号输出幅度调节器;
[0027]
所述第一正弦波生成器,用于对所述第一轴调节驱动信号进行正弦波调制,得到第一轴无幅度调制正弦波信号并发送给所述第一正弦型幅度调制器;
[0028]
所述第一正弦型幅度调制器,用于对所述第一轴无幅度调制正弦波信号进行幅度调制,得到所述第一轴正弦波驱动信号,并发送给所述第一信号输出幅度调节器;
[0029]
所述第一信号输出幅度调节器,用于基于所述扫描圈数对所述第一轴正弦波驱动
信号进行信号增益调节,得到所述第一轴驱动信号;
[0030]
所述第二正弦波生成器,用于对所述第二轴调节驱动信号进行正弦波调制,得到第二轴无幅度调制正弦波信号,并发送给所述第二正弦型幅度调制器;
[0031]
所述第二正弦型幅度调制器,用于对所述第二轴无幅度调制正弦波信号进行幅度调制,得到所述第二轴正弦波驱动信号,并发送给所述第二信号输出幅度调节器;
[0032]
所述第二信号输出幅度调节器,用于基于所述扫描圈数对所述第二轴正弦波驱动信号进行信号增益调节,得到所述第二轴驱动信号。
[0033]
本技术的第二方面提供一种螺旋形驱动信号调制方法,包括:
[0034]
获取原始信号和调制参数;
[0035]
根据所述调制参数对所述原始信号进行信号分配和正弦参数调节,以获得第一轴驱动信号和第二轴驱动信号,所述正弦参数调节包括幅度参数调节、频率参数调节和相位差调节中的至少一种。
[0036]
本技术的第三方面提供一种成像系统,包括压电陶瓷管扫描光纤内窥镜装置和如本技术的第一方面所述的螺旋形驱动信号调制装置。
[0037]
本技术的第四方面提供一种扫描轨迹采集系统,包括扫描器以及分别与所述扫描器连接的扫描轨迹捕捉装置和如本技术的第一方面所述的螺旋形驱动信号调制装置。
[0038]
本技术提供的技术方案可以包括以下有益效果:
[0039]
本技术的方案中,在获取到原始信号和调制参数后,可以根据调制参数对原始信号进行信号分配和正弦参数调节,以获得第一轴驱动信号和第二轴驱动信号。其中,正弦参数调节可以包括幅度参数调节、频率参数调节和相位差参数调节中的至少一种。如此,将第一轴驱动信号和第二轴驱动信号作为扫描器的双通道正弦型驱动信号,在双通道正弦型驱动信号的作用下,扫描器的扫描阶段可以分为正向扫描阶段和反向扫描阶段,两个扫描阶段均可成像,调制参数调节简便,且可以有效提高极限成像帧率。
附图说明
[0040]
为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0041]
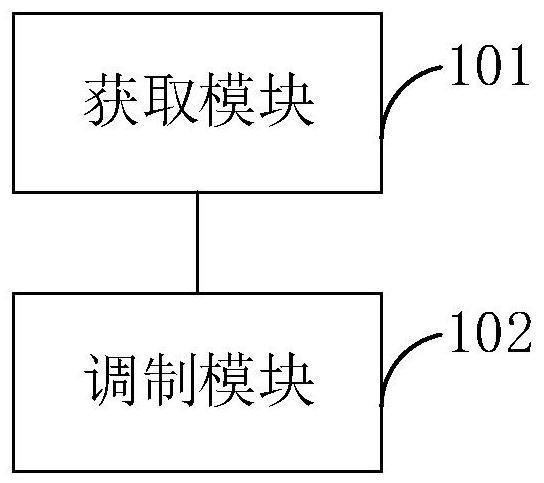
图1是本技术一个实施例提供的一种螺旋形驱动信号调制装置的结构示意图。
[0042]
图2是本技术另一个实施例提供的一种螺旋形驱动信号调制装置的调制模块的结构示意图。
[0043]
图3是本技术又一个实施例提供的一种螺旋形驱动信号调制装置的调制模块的结构示意图。
[0044]
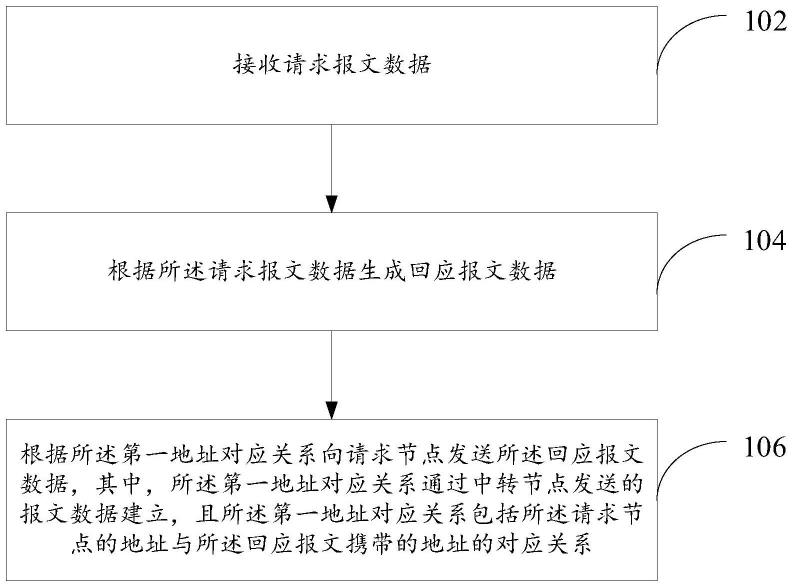
图4是本技术另一个实施例提供的一种螺旋形驱动信号调制方法的流程图。
具体实施方式
[0045]
为使本技术的目的、技术方案和优点更加清楚,下面将对本技术的技术方案进行详细的描述。显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基
于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所得到的所有其它实施方式,都属于本技术所保护的范围。
[0046]
相关技术中,螺旋形扫描为半径按一定规律变化的圆周扫描,其两轴驱动信号为频率相同相位差为π/2的幅度调制正弦波。螺旋形扫描边缘为圆形,其像素归一化帧率高于李萨茹形,扫描轨迹中间密集,四周稀疏,与观察敏感范围相符。同时,螺旋形扫描两轴驱动信号频率相同,符合压电陶瓷扫描器特性。因此,相较于李萨茹和栅格轨迹,螺旋形扫描更适用于压电陶瓷管扫描光纤内窥镜装置。然而,现有的螺旋形扫描的驱动信号的调制方式多为斜坡型辐度调制,这种驱动信号下的扫描分为扫描成像阶段和阻尼复位阶段,阻尼复位阶段即在扫描完成后需要通过反向阻尼信号将光纤复位,而复位过程中光纤驱动信号生成较为复杂,且复位阶段无法进行成像,导致极限成像帧率较低。
[0047]
为此,本技术的实施例提供一种螺旋形驱动信号调制装置,如图1所示,该装置可以包括获取模块101和调制模块102。其中,获取模块101,用于获取原始信号和调制参数;调制模块102,用于根据调制参数对原始信号进行信号分配和正弦参数调节,以获得第一轴驱动信号和第二轴驱动信号,正弦参数调节包括幅度参数调节、频率参数调节和相位差参数调节中的至少一种。
[0048]
实施时,调制模块对原始信号进行信号分配,可以将原始信号一分为二,以此获取到双通道信号,为满足压电陶瓷扫描器对两轴交流调制信号的需求。在得到双通道信号后,调制模块继续对双通道信号进行正弦参数调节,其中,对双通道信号进行频率参数调节,实现频率可调,可以使得到的第一轴驱动信号和第二轴驱动信号与压电陶瓷管扫描器的谐振频率相近,继而提高压电陶瓷管驱动光纤扫描范围;对双通道信号进行幅度参数调节和相位差参数调节,实现幅度和相位差可调,可以矫正扫描过程中产生的失真,同时调节扫描区域尺寸。最终,经过调制模块的正弦参数调节,可以得到两路存在相位差的正弦型驱动信号,即第一轴驱动信号和第二轴驱动信号。
[0049]
本实施例中,在获取到原始信号和调制参数后,可以根据调制参数对原始信号进行信号分配和正弦参数调节,以获得第一轴驱动信号和第二轴驱动信号。其中,正弦参数调节可以包括幅度参数调节、频率参数调节和相位差参数调节中的至少一种。如此,将第一轴驱动信号和第二轴驱动信号作为扫描器的双通道正弦型驱动信号,在双通道正弦型驱动信号的作用下,扫描器的扫描阶段可以分为正向扫描阶段和反向扫描阶段,两个扫描阶段均可成像,调制参数调节简便,且可以有效提高极限成像帧率。
[0050]
需要说明的是,正弦参数调节需要根据实际需求进行设置。例如,当原始信号仅满足需求的幅度要求时,正弦参数调节可以是频率参数调节和相位差参数调节;当原始信号仅满足频率要求时,正弦参数调节可以是幅度调节和相位差参数调节;当原始信号仅满足相位差要求时,正弦参数调节可以是幅度参数调节和频率参数调节;当原始信号的幅度、频率和相位差均不满足需求时,正弦参数调节为幅度参数调节、频率参数调节和相位差参数调节。
[0051]
实际应用中,第一轴驱动信号和第二轴驱动信号可以作为幅度、频率和相位差可调的双通道正弦型驱动信号,即幅度、频率和相位差可调的x轴驱动信号以及幅度、频率和相位差可调的y轴驱动信号,实现基于压电陶瓷管驱动光纤高帧率低失真的双光子荧光扫描成像。
[0052]
一些实施例中,在根据调制参数对原始信号进行信号分配和正弦参数调节时,调制模块,具体可以用于:将原始信号和调制参数带入预设公式中,以计算获取第一轴驱动信号和第二轴驱动信号。
[0053]
其中,预设公式可以是:
[0054][0055]
式中,v
x
和vy分别为第一轴驱动信号和第二轴驱动信号,a
x
为第一轴驱动信号的幅度参数,ay为第二轴驱动信号的幅度参数,f为驱动光纤振动频率参数,t为原始信号的震荡时间,n为单幅影像中的扫描圈数,ω0为相位差参数。
[0056]
具体实施时,在获取到原始信号后,就可以确定原始信号的震荡时间t=n
quartz
/f
quartz
,其中,f
quartz
为原始信号的频率,n
quartz
为原始信号的震荡个数,t即为原始信号以频率f
quartz
震荡n
quartz
次所花费的时间。同样的,在获取到调制参数后,就可以确定a
x
、ay、f、n和ω0。如此,根据获取到的原始信号和调制参数,就可以得到扫描器所需的双通道正弦型驱动信号,以满足扫描器需求。
[0057]
一些实施例中,为了更加便于控制调制参数,使得驱动信号的产生更加简便,调制参数可以包括:幅度参数、频率参数和相位差参数。相应的,如图2所示,调制模块可以包括频率调节子模块201、相位差调节子模块202、第一轴正弦波幅度调节子模块203和第二轴正弦波幅度调节子模块204。
[0058]
其中,频率调节子模块201,用于基于频率参数,调节原始信号的频率,得到驱动信号,并发送给相位差调节子模块202。相位差调节子模块202,用于基于相位差参数,对驱动信号进行调节,得到存在相位差的第一轴调节驱动信号和第二轴调节驱动信号,并发送第一轴调节驱动信号给第一轴正弦波幅度调节子模块203,发送第二轴调节驱动信号给第二轴正弦波幅度调节子模块204。第一轴正弦波幅度调节子模块203,用于基于幅度参数对第一轴调节驱动信号进行正弦波调制与信号幅度调节,得到第一轴驱动信号。第二轴正弦波幅度调节子模块204,用于基于幅度参数对第二轴调节驱动信号进行正弦波调制与信号幅度调节,得到第二轴驱动信号。
[0059]
为了达到调节频率的目的,一些实施例中,频率参数可以包括扫描相位间等待步数,如图3所示,频率调节子模块201可以包括正弦波频率调节计数器,正弦波频率调节计数器可以用于基于扫描相位间等待步数对原始信号进行频率调节,得到驱动信号,并输出给相位差调节子模块。
[0060]
具体实施时,在原始信号频率f
work
与驱动光纤扫描器固有频率相近的情况下,可以使用正弦波频率调节计数器调节总步数为n
total
的相位差调节子模块中每两个扫描信号相位间的等待计数步数n
wait
,达到调节驱动信号扫描频率f的目的,在应用到压电陶瓷管驱动光纤扫描中时,可以有效提高扫描范围。
[0061]
其中,f的表达式为:
[0062]
[0063]
实际应用中,原始信号多为石英晶振信号,其频率为f
quartz
,为提高压电陶瓷管驱动光纤扫描范围,确保得到的驱动信号与压电陶瓷管驱动光纤扫描器固有频率相近,如图3所示,频率调节子模块还可以包括锁相环分频器,如此,可以使用锁相环分频器对输入的石英晶振信号进行倍频,倍频系数可以为n
pll
,得到频率为f
work
的信号并输入到正弦波频率调节计数器中进行后续处理。其中,f
work
=n
pll
·fquartz
。
[0064]
如此,公式(2)也可以表示为:
[0065][0066]
一些实施例中,为了达到相位差参数调节的目的,相位差参数可以包括单周期扫描相位步数和双通道计数差值数量。相应的,如图3所示,相位差调节子模块202可以包括正弦波相位计数器和两轴驱动信号相位差调节器。其中,正弦波相位计数器,用于基于单周期扫描相位步数对驱动信号进行计数调整,得到第一轴调节驱动信号,并分别发送给两轴驱动信号相位差调节器和第一轴正弦波幅度调节子模块;两轴驱动信号相位差调节器,用于基于双通道计数差值数量对第一轴调节驱动信号进行相位差调整,得到第二轴调节驱动信号,并发送给第二轴正弦波幅度调节子模块。
[0067]
实施时,正弦波相位计数器可以根据单周期扫描相位步数n
total
进行计数调整,两轴驱动信号相位差调节器通过双通道计数差值数量n
phase
进行计数个数调整,实现两轴驱动信号的相位差ω0调节,对应关系如下:
[0068][0069]
同样的,为了达到幅度调节的目的,幅度参数可以包括扫描圈数;如图3所示,第一轴正弦波幅度调节子模块203可以包括第一正弦波生成器、第一正弦型幅度调制器和第一信号输出幅度调节器;第二轴正弦波幅度调节子模块204可以包括第二正弦波生成器、第二正弦型幅度调制器和第二信号输出幅度调节器。
[0070]
其中,第一正弦波生成器,用于对第一轴调节驱动信号进行正弦波调制,得到第一轴无幅度调制正弦波信号并发送给第一正弦型幅度调制器;第一正弦型幅度调制器,用于对第一轴无幅度调制正弦波信号进行幅度调制,得到第一轴正弦波驱动信号,并发送给第一信号输出幅度调节器;第一信号输出幅度调节器,用于基于扫描圈数对第一轴正弦波驱动信号进行信号增益调节,得到第一轴驱动信号。同样的,第二正弦波生成器,用于对第二轴调节驱动信号进行正弦波调制,得到第二轴无幅度调制正弦波信号,并发送给第二正弦型幅度调制器;第二正弦型幅度调制器,用于对第二轴无幅度调制正弦波信号进行幅度调制,得到第二轴正弦波驱动信号,并发送给第二信号输出幅度调节器;第二信号输出幅度调节器,用于基于扫描圈数对第二轴正弦波驱动信号进行信号增益调节,得到第二轴驱动信号。
[0071]
其中,扫描圈数需要根据图像分辨率(n
×ntotal
)和帧率(f/n)的要求进行设定,此处不作限定。
[0072]
经过上述步骤,可生成如上述公式(1)所示的具有频率、相位差和幅度可调节功能的第一轴驱动信号和第二轴驱动信号,控制参数调节简便,在用于螺旋形轨迹扫描成像时,可以有效提高成像帧率,给用户带了极大便利。
[0073]
基于相同的技术构思,本技术的实施例还提供一种螺旋形驱动信号调制方法,如图4所示,螺旋形驱动信号调制方法至少包括如下步骤:
[0074]
步骤41、获取原始信号和调制参数。
[0075]
步骤42、根据调制参数对原始信号进行信号分配和正弦参数调节,以获得第一轴驱动信号和第二轴驱动信号,正弦参数调节包括幅度参数调节、频率参数调节和相位差调节中的至少一种。
[0076]
具体的,本技术的实施例提供的螺旋形驱动信号调制方法的具体实现方式可以参考以上任意实施例所述的螺旋形驱动信号调制装置的具体实施方式,此处不再赘述。
[0077]
本技术的实施例提供一种成像系统,包括压电陶瓷管扫描光纤内窥镜装置和如以上任意实施例所述的螺旋形驱动信号调制装置。
[0078]
本技术的实施例提供一种扫描轨迹采集系统,包括扫描器以及分别与扫描器连接的扫描轨迹捕捉装置和如以上任一实施例所述的螺旋形驱动信号调制装置。
[0079]
其中,扫描器可以是压电陶瓷管驱动光纤扫描器。
[0080]
可以理解的是,上述各实施例中相同或相似部分可以相互参考,在一些实施例中未详细说明的内容可以参见其他实施例中相同或相似的内容。
[0081]
需要说明的是,在本技术的描述中,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性。此外,在本技术的描述中,除非另有说明,“多个”的含义是指至少两个。
[0082]
流程图中或在此以其他方式描述的任何过程或方法描述可以被理解为,表示包括一个或更多个用于实现特定逻辑功能或过程的步骤的可执行指令的代码的模块、片段或部分,并且本技术的优选实施方式的范围包括另外的实现,其中可以不按所示出或讨论的顺序,包括根据所涉及的功能按基本同时的方式或按相反的顺序,来执行功能,这应被本技术的实施例所属技术领域的技术人员所理解。
[0083]
应当理解,本技术的各部分可以用硬件、软件、固件或它们的组合来实现。在上述实施方式中,多个步骤或方法可以用存储在存储器中且由合适的指令执行系统执行的软件或固件来实现。例如,如果用硬件来实现,和在另一实施方式中一样,可用本领域公知的下列技术中的任一项或他们的组合来实现:具有用于对数据信号实现逻辑功能的逻辑门电路的离散逻辑电路,具有合适的组合逻辑门电路的专用集成电路,可编程门阵列(pga),现场可编程门阵列(fpga)等。
[0084]
本技术领域的普通技术人员可以理解实现上述实施例方法携带的全部或部分步骤是可以通过程序来指令相关的硬件完成,所述的程序可以存储于一种计算机可读存储介质中,该程序在执行时,包括方法实施例的步骤之一或其组合。
[0085]
此外,在本技术各个实施例中的各功能单元可以集成在一个处理模块中,也可以是各个单元单独物理存在,也可以两个或两个以上单元集成在一个模块中。上述集成的模块既可以采用硬件的形式实现,也可以采用软件功能模块的形式实现。所述集成的模块如果以软件功能模块的形式实现并作为独立的产品销售或使用时,也可以存储在一个计算机可读取存储介质中。
[0086]
上述提到的存储介质可以是只读存储器,磁盘或光盘等。
[0087]
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示
例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本技术的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
[0088]
尽管上面已经示出和描述了本技术的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本技术的限制,本领域的普通技术人员在本技术的范围内可以对上述实施例进行变化、修改、替换和变型。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。