1.本发明涉及飞机发动机失效过程建模技术领域,尤其是涉及融合多任务学习的飞机发动机失效状态预测方法。
背景技术:
2.在大多数制造系统中,机器的失效是不可避免的,如飞机发动机、轴承系统和锂电池等,因此,机器的故障预测和健康管理(phm)对于确保整个制造系统的稳定性来说至关重要。机器剩余使用寿命(rul)的预测是phm中最重要的任务之一,基于准确预测的rul,可以更为合理地安排机器的维护或更换。
3.在现有的研究中,基于数据驱动预测rul的方法大多根据基于单一传感器或多个传感器收集到的反映机器失效状态的信号数据进行。然而,基于单一传感器信号的分析方法,如随机过程模型和一般路径模型,无法描述有多个包含失效状态信息的传感器的复杂系统中机器的失效过程。在基于多传感器信号的分析方法中,数据融合可以融合机器的多维失效信号,从而获得更好的rul预测结果。现有的数据融合方法可以分为决策级融合和数据级融合。决策级融合侧重于不同预测结果的融合方法,但由于它将每个传感器信号视为单一的失效过程,使得结果不能很好地描述失效状态。数据级融合侧重于融合多个传感器信号的信息,以获得一个更为全面的融合信号,主要的融合方法包括构建健康指数(hi)、主成分分析、隐马尔科夫模型、神经模糊系统和神经网络。这些方法可以归纳为单任务学习(stl),忽略了机器由于在相似生产操作环境下的相似性。导致了rul结果的不准确,特别是在有缺失数据存在的情况。
4.综上所述,随着制造系统复杂性不断增加,同时考虑到由于设备停机、远程通讯故障等因素造成的数据缺失问题,需要一种能够通过多任务学习(mtl)利用机器之间的相似性,从而针对高维的不完整失效信号进行失效模型构建和rul预测的方法,来保证生产系统的稳定性。
技术实现要素:
5.本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种融合多任务学习的飞机发动机失效状态预测方法,利用高维的发动机失效数据,建立健康指数模型和退化模型并提出了qoiem算法进行参数求解,在数据缺失的情况下依然有很高的剩余寿命预测准确度。
6.本发明的目的可以通过以下技术方案来实现:
7.一种融合多任务学习的飞机发动机失效状态预测方法,包括:预先基于健康指数模型和失效模型构建多任务学习模型,通过获取传感器失效信号数据对该多任务学习模型进行参数估计;获取待预测传感器数据,并载入参数估计后的多任务学习模型,获取失效状态预测结果;
8.所述失效模型采用二次多项式失效模型描述失效状态,所述健康指数模型通过设
置权重系数将各个传感器信号线性叠加描述健康状态;根据健康状态和失效状态之间的关系,将所述健康模型和失效模型融合构成所述多任务学习模型。
9.进一步地,所述多任务学习模型的表达式为:
10.h
l
=x
l
w=φ
l
γ
l
∈
l
11.式中,表示h
l
(t)的向量,(t)的向量,表示x
l
(t)的矩阵,表示φ(t)的矩阵,表示ε
l
(t)的向量;
12.h
l
(t)为飞机发动机l在时间t内的健康状态,x
l
(t)=[x
l1
(t),...,x
lm
(t)]∈r1×m为在时间t内从飞机发动机l的m个传感器中收集的传感器信号向量,w∈rm×1为权重系数;g
l
(t)为飞机发动机l在时间t内的失效状态,φ(t)=[1,t,t2]∈r1×3是二次基函数在时间t上的向量,是模型参数的向量;ε
l
(t)表示飞机发动机l在时间t内的噪声。
[0013]
进一步地,所述健康指数模型的表达式为:
[0014]hl
(t)=x
l
(t)w
[0015]
式中,h
l
(t)为飞机发动机l在时间t内的健康状态,x
l
(t)=[x
l1
(t),...,x
lm
(t)]∈r1×m为在时间t内从飞机发动机l的m个传感器中收集的传感器信号向量,w∈rm×1为权重系数;
[0016]
所述失效模型的表达式为:
[0017]gl
(t)=φ(t)γ
l
[0018]
式中,g
l
(t)为飞机发动机l在时间t内的失效状态,φ(t)=[1,t,t2]∈r1×3是二次基函数在时间t上的向量,是模型参数的向量;
[0019]
所述健康状态和失效状态之间的关系的表达式为:
[0020]hl
(t)=z(x
l
(t))=g
l
(t) ε
l
(t)
[0021]
式中,ε
l
(t)表示飞机发动机l在时间t内的噪声。
[0022]
进一步地,所述模型参数γ
l
遵循多元正态分布,所述模型参数γ
l
的表达为:
[0023]
γ
l
~n(μ
γ
,c
γ
)
[0024]
式中,μ
γ
和c
γ
是多元正态分布的均值向量和协方差矩阵;
[0025]
所述噪声项∈
l
服从正态分布n(0,σ2),其中σ为方差。
[0026]
进一步地,对多任务学习模型进行参数估计的过程具体包括以下步骤:
[0027]
s1:构建初始化参数θ=[μ
γ
,c
γ
,σ2]和参数j,并设置j=0;
[0028]
s2:根据健康指数模型的性质,通过二次优化估计权重系数w;
[0029]
s3:获得基于完整数据的联合分布的对数似然,然后在隐变量γ
l
的后验分布函数上计算期望的对数后验q(θ,θ
(j)
);
[0030]
s4:通过arg max
θ
q(θ,θ
(j)
),将θ更新为θ
(j 1)
;
[0031]
s5:检查θ
(j 1)
和θ
(j)
是否满足收敛条件,若满足,则得到最终的参数估计结果,否则返回步骤s2。
[0032]
进一步地,所述权重系数w采用二次规划模型进行估计,所述权重系数w的二次规划模型的表达式为:
[0033][0034]
s.t.nw=1,-mw≤0
[0035]
其中,
[0036][0037][0038][0039][0040]
式中,l(l=1,...,l)为飞机发动机序号,l为飞机发动机的总数,r是通过k折交叉验证确定的调整系数,n∈r1×m,n由1和-1组成,m=diag(n)∈rm×m和0∈rm×1均表示全零向量,c
l
为权重矩阵,表示飞机发动机l在其故障时间τ
l
的传感器信号向量,其中i∈r
l
×
l
是单位矩阵,1∈r
l
×1是所有1的向量。
[0041]
进一步地,得到权重系数w
(j)
后,采用em算法更新失效模型中的参数θ=[μ
γ
,c
γ
,σ2];取作为观测数据,γ
l
作为隐变量;在em算法中,通过步骤s3计算完整数据的预期对数似然,并在步骤s4中更新参数。
[0042]
进一步地,步骤s3中,期望的对数后验q(θ,θ
(j)
)的计算表达式为:
[0043][0044]
式中,是对数联合分布对的后验分布的期望,lnp(θ)是θ的对数超先验分布。
[0045]
进一步地,步骤s4中,参数θ通过arg max
θ
q(θ,θ
(j)
)更新,并得到参数θ的具体更新表达式为:
[0046]
[0047][0048][0049]
式中,l(l=1,...,l)为飞机发动机序号,l为飞机发动机的总数,μ
γ
服从多元正态分布其中,和分别是相应的均值向量和协方差矩阵;和是γ
l
|h
l
,θ
(j)
的后验分布的估计期望和协方差,d为多元分布的维度,x
l
为传感器信号向量矩阵;是先验分布的均值和方差,τ是自由度,且τ>2,β代表先验分布的置信水平,在本发明中均是超参数。n
l
为第l个训练发动机的运行时间。
[0050]
进一步地,所述方法还包括通过参数估计后的多任务学习模型,根据待预测传感器数据预测正在使用的飞机发动机的剩余寿命;
[0051]
所述正在使用的飞机发动机的剩余寿命的计算过程包括:
[0052]
首先,根据待预测传感器数据计算后验分布γq|hq,其中hq是通过hq=xqw得到的健康状态;
[0053]
然后,给定正在使用的飞机发动机q在特定时间的失效状态的失效状态其中根据和d的分布,在之后的t时刻失效状态超过故障阈值的概率的计算表达式为:
[0054][0055]
式中,中tq是正在使用的飞机发动机q的剩余寿命,cdf(
·
)是标准正态分布的累积分布函数,为样本均值,为样本方差,为样本方差,和代表表示正在使用的飞机发动机q的最后观测时间,nq是飞机发动机q的可用观测数,给定tq≥0,则剩余寿命的条件概率的表达式为:
[0056][0057]
最后,通过求解p(tq≤t|tq≥0)=0.5和变量t来预测正在使用的飞机发动机q的剩
余寿命。
[0058]
与现有技术相比,本发明具有以下优点:
[0059]
(1)本发明提出了一种基于数据融合的多任务学习方法,利用高维的发动机失效数据,建立健康指数模型和退化模型并提出了qoiem算法进行参数求解,在求解的迭代过程中,融合模型和失效模型的参数被同时更新,使得参数估计准确性更高。
[0060]
(2)本发明方案能准确预测正在使用中发动机的剩余寿命,并且在数据缺失的情况下依然有很高的准确度。该方法能延展到其他生产系统,通过对剩余寿命的准确预测实现高效的质量管理,减少故障带来的隐患。
附图说明
[0061]
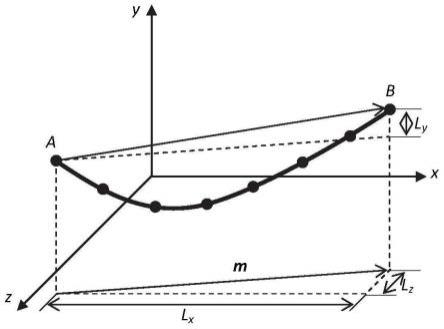
图1为本发明实施例中某一飞机发动机的传感器失效信号数据、hi和相应的失效状态,传感器失效信号数据和构造的hi由点表示,相应的失效状态由实线表示;
[0062]
图2为显示了在损失模式a、b和c下,在10%到80%的不同数据缺失程度下,提出的方法和用作比较的方法的rul预测结果的对比;
[0063]
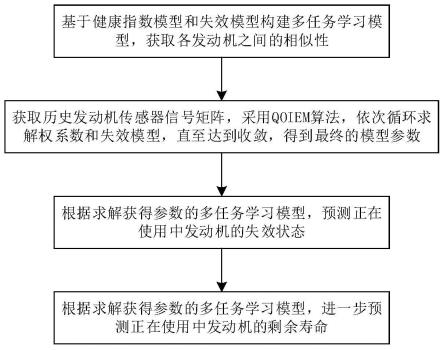
图3为本发明实施例中提供的一种融合多任务学习的飞机发动机失效状态预测方法的流程示意图。
具体实施方式
[0064]
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本发明实施例的组件可以以各种不同的配置来布置和设计。
[0065]
因此,以下对在附图中提供的本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0066]
应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
[0067]
实施例1
[0068]
如图3所示,本实施例提供一种融合多任务学习的飞机发动机失效状态预测方法,基于健康指数(hi)模型和失效模型构建多任务学习(mtl)模型来获取各发动机之间的相似性。同时,本发明提出了二次规划-最大后验期望(qoiem)参算法来完成上述模型参数的求解。最后,根据求解获得的参数,可以相应地预测正在使用中发动机的剩余使用寿命。
[0069]
通过采用本发明所提供的技术方案,有助于准确描述飞机发动机的健康状态和失效过程,并实现对飞机发动机剩余寿命的准确预测,能够有效减少由于飞机发动机的损坏而导致的经济和社会损失。
[0070]
本实施例以飞机涡扇发动机的失效数据集为示例。本实施例使用的飞机涡扇发动机的失效数据集由商业模块化航空推进仿真系统(commercial modular aero-propulsion system simulation,c-mapss)生成,该仿真系统由美国宇航局开发,同时也被许多phm相关
研究采用。
[0071]
考虑到失效信号应表现出一致的增加(或减少)趋势,从该数据集中21个传感器中选出11个候选传感器失效信号,包括t24、t50、p30、nf、ps30、phi、nrf、bpr、htbleed、w31和w32,以监测飞机发动机在相同运行状态和故障模式下的失效状态。数据集中有100个飞机发动机(即l=100)的历史观测数据,具体包含20631个观测数据(即);有100个正在使用的飞机发动机(即q=100)数据,具体包含13096个观测数据(即)。100个飞机发动机的历史观测数据包括飞机发动机从开始运行到发生故障全过程的数据,而100个正在使用的飞机发动机数据包括飞机发动机从开始运行到某一时间点的数据,以及相应的rul真实数据。本实施例使用100个飞机发动机的历史观测数据训练模型,使用100个正在使用的的飞机发动机数据预测rul,并通过比较预测的rul值与相应的rul真实数据来验证本发明模型的性能。
[0072]
下面利用本发明模型对飞机发动机进行健康指数和失效过程建模,以及剩余使用寿命预测,具体实施方式如下:
[0073]
1)健康指数和失效过程建模
[0074]
失效过程建模:
[0075]
本发明考虑一组处于相同运行和环境条件下的飞机发动机,因此它们的失效状态具有相似的特征。不失一般性,考虑具有相似失效状态的l个飞机发动机。对于每个飞机发动机l(l=1,...,l),有n
l
个观察时间点。基于对于传感器信号的研究经验和趋势分析,采用二次多项式失效模型来描述的失效状态:
[0076]gl
(t)=φ(t)γ
l
ꢀꢀꢀ
(1)
[0077]
其中,φ(t)=[1,t,t2]∈r1×3是二次基函数在时间t上的向量,和是模型参数的向量。
[0078]
健康指数模型:
[0079]
本发明将飞机发动机l的故障时间τ
l
定义为失效状态g
l
(t)超过预先设定的故障阈值d的时间:
[0080][0081]
其中失效状态g
l
(t)是时间t的函数。本发明认为机组在相同的运行和环境条件下运行。
[0082]
给出hi的定义如下。假设失效状态g
l
(t)可以从具有白噪声污染的多个传感器信号的融合函数z(x
l
(t))中恢复,即
[0083]gl
(t)=z(x
l
(t))-ε
l
(t)
ꢀꢀꢀ
(3)
[0084]
在式(2)中,x
l
(t)=[x
l1
(t),...,x
lm
(t)]∈r1×m表示在时间t内从飞机发动机l的m个传感器中收集的传感器信号向量。ε
l
(t)表示飞机发动机l在时间t内的噪声,其中ε
l
(t)~n(0,σ2)。在本发明中,通过融合函数将hi定义为多个传感器信号的组合:
[0085]hl
(t)=z(x
l
(t))
ꢀꢀꢀ
(4)
[0086]
其中,h
l
(t)代表飞机发动机l在时间t内的hi。总而言之,hi和失效状态之间的关
系可以表达如下:
[0087]hl
(t)=z(x
l
(t))=g
l
(t) ε
l
(t)
ꢀꢀꢀ
(5)
[0088]
2)基于数据融合的多任务学习建模
[0089]
由于hi代表每个飞机发动机的健康状态,本研究通过设置权重系数w∈rm×1将x
l
(t)线性叠加来设计hi,因此h
l
(t)可以表示为
[0090]hl
(t)=z(x
l
(t))=x
l
(t)w
ꢀꢀꢀ
(6)
[0091]
考虑n
l
个观察时间点,将健康指数表达式写成矩阵形式:
[0092]hl
=x
l
w=φ
l
γ
l
∈
l
ꢀꢀꢀ
(7)
[0093]
其中,表示h
l
(t)的向量,(t)的向量,表示x
l
(t)的矩阵,表示φ(t)的矩阵,表示ε
l
(t)的向量。
[0094]
为了捕捉飞机发动机之间的相似性,本发明将多任务学习集成到上述模型结构中,旨在共享在单个飞机发动机中获得的知识。具体来说,认为每个飞机发动机的模型参数γ
l
在飞机发动机之间共享公共知识,并假设它遵循多元正态分布:
[0095]
γ
l
~n(μ
γ
,c
γ
)
ꢀꢀꢀ
(8)
[0096]
其中,μ
γ
和c
γ
是多元正态分布的均值向量和协方差矩阵。假设μ
γ
和c
γ
的超先验分布是正态逆威沙特(niw)分布,它是多元高斯分布的共轭先验分布:
[0097][0098]
这里,μ
γ
服从多元正态分布其中,和分别是相应的均值向量和协方差矩阵,β代表先验分布的置信水平。c
γ
服从正态逆威沙特分布其中是单位矩阵,τ是自由度,且τ>2。
[0099]
基于数据融合的多任务学习模型可以归纳如下:
[0100]
a)基于式(9)构造μ
γ
和c
γ
;
[0101]
b)从分布γ
l
~n(μ
γ
,c
γ
)中得到了每个飞机发动机l的模型参数γ
l
,其中l=1,...,l;
[0102]
c)给定表示飞机发动机l观测到的传感器信号的矩阵x
l
,hi可以构造为h
l
=x
l
w,进一步利用二次模型拟合为h
l
=φ
l
γ
l
∈
l
。
[0103]
这里,模型参数的估计将基于所有合适的飞机发动机,同时完成健康指数的构建和失效过程模型的参数求解。
[0104]
3)利用qoiem算法进行参数估计
[0105]
本实施例提出了一种qoiem算法来估计基于数据级融合的多任务学习模型的参数考虑hi构造的特性,通过二次规划估计权重系数w,在得到权重系数后,采用em算法来更新失效模型中的参数θ=[μ
γ
,c
γ
,σ2]。之后,对每个飞机发动机构建相应的hi,并基于11种选定的传感器失效信号数据和构建的hi,实现失效模型的多任务学习。方法的伪代码如下:
[0106]
算法1 qoiem算法
[0107]
输入:飞机发动机历史观测数据
[0108]
输出:估计的参数θ=[μ
γ
,c
γ
,σ2]和w
[0109]
步骤:
[0110]
初始化j=0
[0111]
while
[0112]
利用二次规划估计融合模型中的权重系数w
(j)
[0113]
通过map-em算法估计失效模型中的参数θ=[μ
γ
,c
γ
,σ2]
[0114]
e步:计算期望对数后验q(θ,θ
(j)
)
[0115]
m步:通过arg max
θ
q(θ,θ
(j)
)更新θ并得到θ
(j 1)
[0116]
if满足收敛条,即rmse
j 1
%<δ
[0117]
stop循环
[0118]
else
[0119]
j=j 1
[0120]
因此,qoiem算法的流程可以总结如下:
[0121]
1)初始化参数θ=[μ
γ
,c
γ
,σ2],并设置j=0;
[0122]
2)通过考虑hi构造的性质,通过二次优化估计权系数w;
[0123]
3)期望(e)步骤:首先获得基于完整数据的联合分布的对数似然,然后在隐变量γ
l
的后验分布函数上计算期望的对数后验q(θ,θ
(j)
);
[0124]
4)最大值(m)步骤:通过arg max
θ q(θ,θ
(j)
),将θ更新为θ
(j 1)
[0125]
5)检查θ
(j 1)
和θ
(j)
是否满足收敛条件。重复2)-5)直到条件满足。
[0126]
二次规划估计w
[0127]
给定第j次迭代的θ
(j)
,通过考虑hi构造的以下属性来估计线性融合函数中的权重系数w:
[0128]
1)最小拟合误差:失效模型和构建的hi之间的拟合误差应该是最小的,因为hi作为一个飞机发动机的健康状态,它应该被失效模型较好地拟合。
[0129]
2)故障时的最小方差:所有历史飞机发动机在其失效时构建的hi的方差应该是最小的。这些飞机发动机处于相同的运行条件和故障模式下,因此假设它们具有相同的故障阈值。
[0130]
3)单调性:构建的hi应该在所有时间点都遵循单调趋势,这样才能通过其到达阈值的时间来预剩余寿命
[0131]
根据hi构建的这些属性,可以创建相应的目标函数和约束。考虑到接近故障时间的时间点的失效状态对rul预测的影响更大,本发明为不同的时间点设置权重矩阵c
l
,并根据式(7)将加权残差项写为其中是失效模型参数γ
l
的后验期望,是关于w的表达式。
[0132]
为了获得γ
l
的后验期望和方差,首先基于所有的历史飞机发动机,计算完整数据(包括和γ
l
)的联合分布的对数似然函数p(h
l
,γ
l
|θ),它可以写成
[0133][0134]
其中,
[0135][0136]zl
代表分布的归一化系数。其次,在第j次迭代时隐变量γ
l
的后验期望可以通过求解来估计,γ
l
的协方差可以通过hessian矩阵的逆来估计,得到
[0137][0138]
其中是上一次迭代的结果,和是γ
l
|h
l
,θ
(j)
的后验分布的估计期望和协方差。因此,平方拟合误差的无偏估计可以计算为∑
l
(c
l
∈
l
)
t
(c
l
∈
l
)/(l-1)。
[0139]
同时,构造的hi在失效时的方差的无偏估计可以计算为(x
τ
w)
t
g(x
τ
w)。这里,和表示飞机发动机l在其故障时间τ
l
的传感器信号向量。上文中表示包含完整失效过程的传感器信号矩阵,直到历史飞机发动机l失效,因此它的故障时间τ
l
等于其最后观察到的时间点等于其最后观察到的时间点其中i∈r
l
×
l
是单位矩阵,1∈r
l
×1是所有1的向量。因此,给定上述表达式,得到了hi构造的目标函数,以最小化拟合误差和失效时的方差,如下所示:
[0140][0141]
s.t.nw=1,mw≥0
[0142]
其中r是可以通过k折交叉验证确定的调整系数。第一个约束使用nw=1来归一化传感器的权重,而n∈r1×m仅由1和-1组成,以反映传感器增加或减少趋势所对应的传感器信号。第二个约束mw≥0保证hi的单调性,m=diag(n)∈rm×m和0∈rm×1表示全零向量。通过以上步骤,获得了第j次迭代中估计权重系数w的标准二次规划模型
[0143][0144]
其中,
[0145]
[0146][0147]
且
[0148][0149][0150]
这种标准形式的二次规划问题可以通过现有的求解器来求解(本案例中采用python中的qpoases模块)。因此第j从迭代的权重系数w可以被估计为w
(j)
。
[0151]
em算法估计θ
[0152]
得到权重系数w
(j)
后,采用em算法更新失效模型中的参数θ=[μ
γ
,c
γ
,σ2]。取作为观测数据,γ
l
作为隐变量。在em算法中,假设在e步计算完整数据的预期对数似然,并在m步更新参数。
[0153]
e步:
[0154]
根据最大后验(map)估计理论,应该基于联合分布和超先验分布(即式(9))函数p(θ)计算基于隐变量分布的期望对数后验q(θ,θ
(j)
)。
[0155]
联合分布以及隐变量γ
l
的期望和方差可以根据式(10)(11)获得,其中变量w用求解的w
(j)
替代。因此,第j次迭代中完整数据在θ
(j)
的后验分布上的预期对数后验为
[0156][0157]
其中,是对数联合分布对θ
(t)
的后验分布的期望
[0158][0159]
以及ln p(θ)是θ的对数超先验分布(即式(9))
[0160][0161]
其中,
[0162]
[0163]
γd(
·
)表示多元gamma函数,d是多元分布的维度,在本发明中等于3,const与θ没有关系,因此在计算中可以忽略。
[0164]
m步骤:θ可以通过arg max
θ q(θ,θ
(j)
)更新,并得到更新方程推导如下
[0165][0166][0167][0168]
重复上述过程来更新模型参数,直到达到收敛。收敛条件rmse
j 1
%<δ,其中rmse
j 1
是通过比较θ
(j 1)
和θ
(j)
计算得出的均方根误差,δ是预先指定的收敛阈值。
[0169]
表1列出了融合模型中每个传感器的估计权重系数w,权重的正负反映了每个传感器的增加或减少趋势,每个传感器权重的绝对值之和为1。表2中给出了失效模型中参数θ=[μ
γ
,c
γ
,σ2]的估计值。
[0170]
表1传感器模型中估计的权重系数w
[0171][0172]
表2在失效模型中估计的θ
[0173][0174]
图1显示了随机选择的飞机发动机的传感器信号和构建的hi。图中,每个传感器x
l,j
(t)的数据由二次多项式失效模型来拟合。
[0175][0176]
其中,l和j分别代表单位和传感器的索引,是随机效应参数,ε
l,j
(t)是噪声项。是模型参数向量,遵循多变量高分布γ
l,j
~n(μ
γ,j,cγ,j
)。
[0177]
为了描述历史发动机组l的每个单一传感器信号的失效过程,我们按照(15)计算后验分布γ
l,j
|x
l,j
,得到图中所示的每个单一传感器信号的失效曲线,表示x
l,j
(t)的矩阵。可以看出,与任何单一的传感器信号相比,hi具有更好的单调性和更小的波动性,这表明所提出的hi构建方法是合理和有效的。
[0178]
4)rul预测
[0179]
在通过l个飞机发动机的多元传感器失效信号历史数据对模型进行训练后,本发明对正在使用的的飞机发动机的rul进行预测,并比较本发明所提出的方法和基准方法的rul预测误差。
[0180]
对于正在使用的飞机发动机q,有不完整的传感器信号矩阵其中,nq是飞机发动机q的可用观测数。对于rul预测,首先计算后验分布γq|hq,其中hq是通过hq=xqw得到的hi,如下
[0181]
γq|hq~n(μq,∑q),
[0182]
其中,
[0183][0184]
和代表表示正在使用的飞机发动机q的最后观测时间。
[0185]
然后,给定正在使用的飞机发动机q在特定时间的失效状态,即其中可以得到在时间的失效状态分布为其中,其中,以及此外,考虑故障阈值d的变化。d的分布写为其中均值和方差可以通过样本均值和样本方差根据历史飞机发动机故障时的hi来估计。根据和d的分布,在之后的t时刻失效状态超过故障阈值的概率可以写为
[0186][0187]
其中tq是正在使用的飞机发动机q的rul,cdf(
·
)是标准正态分布的累积分布函数(cdf)。给定tq≥0,条件概率可以写成,
[0188][0189]
最后,通过求解p(tq≤t|tq≥0)=0.5和变量t来预测正在使用的飞机发动机q的rul。
[0190]
本发明将正在使用的飞机发动机q的预测误差∈q定义为:预测的rul和正在使用的飞机发动机q的真实rul tq之间的差的绝对值与真实寿命τq的比值:
[0191][0192]
本发明计算了所有正在使用的飞机发动机的∈q,q=1,...,q,然后得到相应的均值和不同真实rul水平下的标准误差。为了反映真实工程案例中数据缺失的各种模式,我们设计了三种不同的信号损失模式来验证本发明所提方法的性能,包括:a)数据点丢失;b)时间步丢失;c)数据点和时间步均有丢失。图2显示了在损失模式a、b和c下,在从10%到80%的不同数据缺失率下,本发明提出的方法和现有的方法的rul预测结果的对比。结果显示,本发明的方法比现有方法的rul预测误差低,因为本发明的方法能够共享各机组的共同信息,有效处理了数据缺失的问题,因此在数据缺失情况下有更好的鲁棒性。
[0193]
以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本发明的构思做出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。