一种用于rv减速器的故障诊断方法、装置
技术领域
1.本发明涉及一种用于rv减速器的故障诊断方法、装置,属于机械设备状态监测及故障诊断技术领域。
背景技术:
2.随着现代制造业的进步,高精度、高转速和稳定控制逐渐成为了工业机器人的发展方向,而这就离不开高精度减速器的配合。减速器作为工业机器人关节的核心部件,其的健康状况决定了工业机器人能否正常运行。rv减速器(rotate vector reducer)以其体积小、传动比大、效率高等特点成为机器人最常用的减速器。而由于rv减速器作为高精密核心部件密封于关节内部,当减速器出现故障时,如何快速的完成故障诊断就成为了一个不可避免的问题。
3.目前关于滚动轴承,亦或者齿轮的故障诊断研究从未中断。关于rv减速器的研究大多数是关于受力分析、动力学建模、试验装置等方面的,很少涉及故障诊断。这是由于rv减速器的工况往往是间歇的往复运动以及变转速运动,这导致rv减速器的故障信号是非平稳信号,传统信号处理方法无法准确地识别故障特征。
技术实现要素:
4.本发明提供了一种用于rv减速器的故障诊断方法、装置,以用于在往复周期间歇运动的条件下,实现rv减速器的故障诊断。
5.本发明的技术方案是:一种用于rv减速器的故障诊断方法,包括:
6.s1、通过加速度传感器2拾取关节臂1往复间歇运动过程中的机械振动的观测信号s(n),并计算rv减速器的相关理论特征频率;其中,n为振动信号s(n)的采样时刻;
7.s2、将步骤s1中所得到的观测信号s(n)进行整周信号的截取,获得同时包含一个上升阶段和一个下降阶段的周期运动信号s1(n);
8.s3、将步骤s2中所得到的周期运动信号s1(n)进行连续小波变换,并根据时频图同步截取周期运动信号s1(n)上升阶段,样本长度为m的近似平稳振动信号,作为预处理信号s2(n);
9.s4、对步骤s3获得的预处理信号s2(n)进行滤波,获得滤波信号x(n);
10.s5、对步骤s4获得的滤波信号x(n)进行fft,对变换后的频域信号进行故障诊断。
11.所述rv减速器的相关理论特征频率包括太阳轮转频f1、行星轮转频f2、支撑盘转频f3、行星轮故障频率f
sr
、太阳轮与行星轮的啮合频率f
1c
。
12.所述计算rv减速器的相关理论特征频率的具体步骤如下:
13.s1.1、已知预设的关节臂1转速n3,通过计算将转速n3转化为转频,而关节臂转频等价于支撑盘转频f3;根据公式计算得到电机5主轴转速n1;其中,n1为电机5主轴转速;z1为太阳轮齿数,z2为行星轮齿数,z4为针轮齿数;
14.s1.2、通过根据公式计算得到太阳轮转频f1;
15.s1.3、根据公式和计算rv减速器行星轮转频f2以及太阳轮与行星轮的啮合频率f
1c
;其中,z3为摆线轮齿数;
16.s1.4、行星轮故障频率f
sr
为行星轮相对于行星架的旋转频率,计算公式为f
sr
=f
2-f3。
17.所述连续小波变换中,选用morlet小波作为母小波。
18.所述样本长度m≥10f
max
;其中,f
max
表示rv减速器的相关理论特征频率中最高频率值的2倍。
19.使用neighcoeff算法对预处理信号s2(n)进行滤波。
20.所述对变换后的频域信号进行故障诊断,具体为:对fft后的频域信号进行行星齿轮多齿磨损故障诊断,当频域谱线与行星轮故障频率f
sr
的误差绝对值为0.2hz以上时,则认定未发生行星轮多齿磨损故障;当频域谱线与行星轮故障频率的误差在-0.2hz~0hz之间或取值为0时,则认定是行星轮多齿磨损故障;当频域谱线与行星轮故障频率的误差在0hz~0.2hz之间,对滤波信号x(n)进行倒谱分析,实现故障诊断。
21.一种用于rv减速器的故障诊断装置,包括:
22.信号拾取模块,用于通过加速度传感器2拾取关节臂1往复间歇运动过程中的机械振动的观测信号s(n),并计算rv减速器的相关理论特征频率;其中,n为振动信号s(n)的采样时刻;
23.第一获得模块,用于将信号拾取模块所得到的观测信号s(n)进行整周信号的截取,获得同时包含一个上升阶段和一个下降阶段的周期运动信号s1(n);
24.截取模块,用于将第一获得模块所得到的周期运动信号s1(n)进行连续小波变换,并根据时频图同步截取周期运动信号s1(n)上升阶段,样本长度为m的近似平稳振动信号,作为预处理信号s2(n);
25.第二获得模块,用于对截取模块获得的预处理信号s2(n)进行滤波,获得滤波信号x(n);
26.故障诊断模块,用于第三获得模块获得的滤波信号x(n)进行fft,对变换后的频域信号进行故障诊断。
27.一种处理器,所述处理器用于运行程序,其中,所述程序运行时执行上述中任意一项所述的用于rv减速器的故障诊断方法。
28.一种计算机可读存储介质,所述计算机可读存储介质包括存储的程序,其中,在所述程序运行时控制所述计算机可读存储介质所在设备执行上述中任意一项所述的用于rv减速器的故障诊断方法。
29.本发明的有益效果是:本发明所提出的时频分析截取平稳阶段信号的方法,使得实际计算结果与理论计算值误差较小;本发明所述方法能够在非平稳振动的条件下,完成rv减速器的故障识别。
附图说明
30.图1为本发明所述方法的流程图;
31.图2为本发明中rv减速器故障模拟实验台实际布置图;
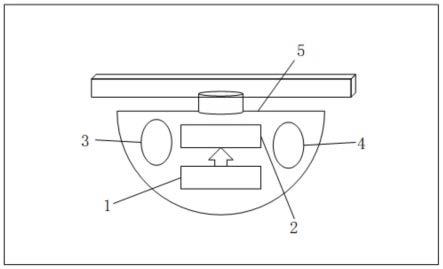
32.图3为本发明中rv减速器故障模拟实验台3d示意图;
33.图4为本发明中行星轮故障的实物图;
34.图5为本发明rv减速器故障模拟实验台运行时传感器拾取振动观测信号的时域波形,并对其进行整周信号截取后的操作;
35.图6为本发明轴承故障模拟实验台运行时传感器拾取振动观测信号的时频谱;并截取观测信号的上升阶段中稳定的部分(约截取0.5s的信号);
36.图7为本发明振动观测信号经时频分析截取稳定阶段后的信号时域波形;
37.图8为本发明中稳定阶段信号经过neighcoeff算法滤波后的时域波形;
38.图9为本发明滤波信号经过fft后的频域波形;
39.图10为本发明滤波信号经过倒频谱分析的倒频谱示意图;
40.图2,3中各标号为:1-关节臂、2-加速度传感器、3-减速器保持架、4-rv减速器、5-电机、6-试验台基座。
具体实施方式
41.下面结合附图和实施例,对发明做进一步的说明,但本发明的内容并不限于所述范围。
42.实施例1:如图1-10所示,一种用于rv减速器的故障诊断方法,包括:
43.s1、首先把加速度传感器2安装在减速器保持架3上表面,通过加速度传感器2拾取关节臂1往复间歇运动过程中的机械振动的观测信号s(n),并计算rv减速器的相关理论特征频率;其中,n为振动信号s(n)的采样时刻;
44.s2、将步骤s1中所得到的观测信号s(n)进行整周信号的截取,获得同时包含一个上升阶段和一个下降阶段的周期运动信号s1(n);
45.s3、将步骤s2中所得到的周期运动信号s1(n)进行连续小波变换,并根据时频图同步截取周期运动信号s1(n)上升阶段,样本长度为m的近似平稳振动信号,作为预处理信号s2(n);
46.s4、对步骤s3获得的预处理信号s2(n)进行滤波,获得滤波信号x(n);
47.s5、对步骤s4获得的滤波信号x(n)进行fft,对变换后的频域信号进行故障诊断。
48.进一步地,可以设置所述rv减速器的相关理论特征频率包括太阳轮转频f1、行星轮转频f2、支撑盘转频f3、行星轮故障频率f
sr
、太阳轮与行星轮的啮合频率f
1c
。
49.由于rv减速器故障多出现在一级减速机构(即行星齿轮系)中,进一步地,可以设置所述计算rv减速器的相关理论特征频率的具体步骤如下:
50.s1.1、已知预设的关节臂1转速n3,通过计算将转速n3转化为转频,而关节臂转频等价于支撑盘转频f3;根据公式计算得到电机5主轴转速n1;其中,n1为电机5主轴转速;z1为太阳轮齿数,z2为行星轮齿数,z4为针轮齿数;
51.s1.2、通过根据公式计算得到太阳轮转频f1;
52.s1.3、根据公式和计算rv减速器行星轮转频f2以及太阳轮与行星轮的啮合频率(即一级啮合频率)f
1c
;其中,z3为摆线轮齿数;
53.s1.4、行星轮故障频率f
sr
为行星轮相对于行星架的旋转频率,计算公式为f
sr
=f
2-f3。
54.进一步地,可以设置所述连续小波变换中,选用morlet小波作为母小波。
55.进一步地,可以设置所述样本长度m≥10f
max
;其中,f
max
表示rv减速器的相关理论特征频率中最高频率值的2倍。由于rv减速器采集到的信号为瞬态冲击信号,当截取的样本长度不符合要求,则无法捕捉到冲击瞬间的幅值,显然,本发明截取的样本长度方式在考虑了rv减速器的相关理论特征频率中最高频率值的2倍基础上还考虑了应大于10倍的信号频率,由此,既能保证信号的频率不失真,同时还可以进一步确保信号的幅值不失真,使采集的信号能贴合实际。具体的,本发明的实例中,分析的最高频率为465.87hz,考虑到可能需要用到2倍频,因此样本点数应不少于9300,所以综上分析取样本长度m为12.5k(即0.5s)。
56.进一步地,可以设置使用neighcoeff算法对预处理信号s2(n)进行滤波。
57.进一步地,可以设置所述对变换后的频域信号进行故障诊断,具体为:对fft后的频域信号进行行星齿轮多齿磨损故障诊断,当频域谱线与行星轮故障频率f
sr
的误差绝对值为0.2hz以上时(即大于等于0.2hz时),则认定未发生行星轮多齿磨损故障;当频域谱线与行星轮故障频率的误差在-0.2hz~0hz或取值为0时之间(即取-0.2hz~0hz之间的数值或取值为0时),则认定是行星轮多齿磨损故障;当频域谱线与行星轮故障频率的误差在0hz~0.2hz之间(即取0hz~0.2hz之间的数值时),对滤波信号x(n)进行倒谱分析,实现故障诊断。
58.再进一步地,所述步骤s3中,对周期信号进行连续小波变换的具体步骤如下:
59.s3.1、设函数ψ∈l2(r)∩l1(r)并且由ψ经伸缩和平移可以得到一簇函数:
[0060][0061]
式中a,b∈r,a≠0,称ψ
a,b
为连续小波,a为伸缩因子,b为平移因子,ψ为母小波。a用于改变连续小波的形状,b用于改变连续小波的位移;
[0062]
s3.2、对于任意函数,则其连续小波变换定义为:
[0063][0064]
式中,《f,ψ
a,b
》表示两函数内积,表示ψ(t)的复共轭;
[0065]
s3.3、通过尺度为a、平移为b的子小波和信号内积可得到每个小波变换系数w
a,b
(a,b),当信号与该子波越相似,则系数值越大,特征成分将在时间尺度相平面上某处集结为高幅值的能量块,反之则能量发散。通过不同的尺度变换,最终得到系数矩阵wf(a,b)能
够刻画出信号的二维时间尺度特征。考虑到morlet小波与旋转机械发生故障时产生的冲击信号形状相似,因此选择morlet小波选为母小波。
[0066]
所述s4中,使用neighcoeff算法对步骤s3获得的预处理信号s2(n)进行滤波,具体为:
[0067]
s4.1、对含有噪声的信号进行离散小波变换;
[0068]
s4.2、对每一个尺度j,将小波系数分组为长度为l的块b
ij
;
[0069]
s4.3、对每一个块b
ij
,利用收缩规则估计其新的系数;
[0070][0071]
式中:λ为用来调整阈值的一个参数,长度l取l=ln n,其中n为信号长度;由下式确定:
[0072][0073]
s4.4、对得到的小波系数进行小波逆变换,得到新的信号,完成信号的降噪。
[0074]
针对现在工业机器人工作的工况往往是间歇性的往复运动,因此采集到的信号往往具有非平稳振动的特点。本发明首先提取一个整周运动的信号,随后再以连续小波变换对整周信号进行时频分析,并截取上升运动中的平稳阶段信号。通过截取这一步操作,降低所分析信号中的非平稳振动成分,使得信号的各项理论计算值与实际计算值偏差尽可能缩小,将非平稳信号近似地转化为平稳信号。随后考虑neighcoeff方法,将相邻的系数作为整体来设定阈值,不仅能保留更多的特征信息,而且其降噪效果也比小波阈值降噪的好。因此本发明使用neighcoeff方法对截取后的信号在保留更多冲击信息的同时,进行滤波降噪。最后,对降噪信号进行fft,对变换后的频域信号进行故障诊断。
[0075]
实施例2:如图1-10所示,再进一步地,结合实验数据,本发明给出可选地具体实施方式如下:
[0076]
一种用于rv减速器的机械故障诊断方法,本实例使用的试验台为模拟机器人关节运动的rv减速器试验台,图3为试验台及传感器的采集位置,试验台包括关节臂1、加速度传感器2、减速器保持架3、rv减速器4、电机5以及试验台基座6;其中,试验台基座6上安装减速器保持架3,通过减速器保持架3安装rv减速器4,电机5的输出轴通过rv减速器4连接关节臂1。实验选用rv40e型号减速器并以针轮固定于试验台,其主要参数包括减速比为121、行星齿轮数目2、太阳轮齿数12、行星轮齿数42、摆线轮齿数39和针轮齿数40。图4为含有多齿磨损故障的行星轮实物图。采集系统以ni-usb9234采集卡与单向加速度传感器构成。振动信号由放置在减速器保持架上的加速器传感器获取,采样频率为25.6khz。实验预设:关节臂固定于rv减速器4中的支撑盘上,运动范围为0
°
~90
°
(单次抬升或下降为90
°
)。摆臂运行速度为100
°
。根据以上参数可直接计算各个特征频率结果如下:太阳轮转频f1为39.1hz、行星轮转频为f2为11.09hz、支撑盘转频为0.28hz、一级传动啮合频率f
1c
为465.87hz、行星轮故障频率f
sr
为10.81hz。具体诊断方法包括以下步骤:
[0077]
s1、首先把加速度传感器2安装在减速器保持架3上表面,通过加速度传感器2拾取机器人关节臂1往复间歇运动过程中的机械振动的观测信号s(n),并计算rv减速器的相关
理论特征频率;其中n为振动信号s(n)的采样时刻;
[0078]
s2、将步骤s1中所采样得到的观测信号s(n)进行整周信号的截取,得到同时包含一个上升阶段和一个下降阶段的周期运动信号s1(n),如图5所示;
[0079]
s3、通过公式将步骤s2中所得到的周期运动信号s1(n)进行连续小波变换,得到系数矩阵wf(a,b)并刻画出信号的时频图,如图6所示。并根据时频图截取上升运动中稳定阶段的信号(约截取0.5s至1s间的信号),从而得到预处理信号s2(n),如图7所示;
[0080]
s4、neighcoeff算法滤波操作如下:首先对预处理信号s2(n)使用离散小波变换得到小波系数。随后根据公式以及公式对小波系数进行修正,后进行重构完成信号的滤波得到滤波信号x(n),如图8所示;
[0081]
s5、对步骤s4中的滤波信号x(n)进行fft,得到图9。不难发现图9中故障频率为10.94hz以及倍频,实际故障频率(10.94hz)介于行星轮转频f2(11.09hz)与理论的行星轮故障频率f
sr
(10.81hz)之间,误差在0hz~0.2hz之间,无法准确完成故障诊断;
[0082]
s6、考虑到频谱无法判断故障,对步骤s5中的滤波信号x(n)进行倒频谱分析,倒频谱图如10所示;图中不难发现同时存在两条较为明显地谱线,计算可得其中左侧的谱线对应频率为11.09hz代表行星轮转频,而右侧的谱线对应的频率为10.94hz,倒频谱中同时出现了频率为11.09hz和10.94hz的谱线,因此可认定为发生了行星轮多齿磨损故障。
[0083]
实施例3:一种用于rv减速器的故障诊断装置,包括:
[0084]
信号拾取模块,用于通过加速度传感器2拾取关节臂1往复间歇运动过程中的机械振动的观测信号s(n),并计算rv减速器的相关理论特征频率;其中,n为振动信号s(n)的采样时刻;
[0085]
第一获得模块,用于将信号拾取模块所得到的观测信号s(n)进行整周信号的截取,获得同时包含一个上升阶段和一个下降阶段的周期运动信号s1(n);
[0086]
截取模块,用于将第一获得模块所得到的周期运动信号s1(n)进行连续小波变换,并根据时频图同步截取周期运动信号s1(n)上升阶段,样本长度为m的近似平稳振动信号,作为预处理信号s2(n);
[0087]
第二获得模块,用于对截取模块获得的预处理信号s2(n)进行滤波,获得滤波信号x(n);
[0088]
故障诊断模块,用于第三获得模块获得的滤波信号x(n)进行fft,对变换后的频域信号进行故障诊断。
[0089]
实施例4:一种处理器,所述处理器用于运行程序,其中,所述程序运行时执行上述中任意一项所述的用于rv减速器的故障诊断方法。
[0090]
实施例5:一种计算机可读存储介质,所述计算机可读存储介质包括存储的程序,其中,在所述程序运行时控制所述计算机可读存储介质所在设备执行上述中任意一项所述的用于rv减速器的故障诊断方法。
[0091]
上述本发明实施例序号仅仅为了描述,不代表实施例的优劣。
[0092]
在本发明的上述实施例中,对各个实施例的描述都各有侧重,某个实施例中没有详述的部分,可以参见其他实施例的相关描述。
[0093]
上面结合附图对本发明的具体实施方式作了详细说明,但是本发明并不限于上述实施方式,在本领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下做出各种变化。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。