1.本发明属于自动化采煤技术领域,具体涉及一种煤矿综采工作面三维虚拟仿真决策分布式系统。
背景技术:
2.综采工作面是煤矿生产的第一现场,但开采环境恶劣,经常突发危险情况。智能化煤矿建设过程中可采用虚拟现实、数字孪生等新一代技术与传统采矿工业相结合,基于物理综采面构建虚拟综采面,通过实时数据分析、仿真物理综采面运行工况,并将分析预测结果反馈给物理综采面,为自适应采煤提供虚拟仿真实时交互环境,提升煤矿自动化生产水平,达到安全高效开采的目的。
3.当前,煤矿数字孪生技术尚处于创新初始阶段。申请号为202011263636.7的发明专利提出一种煤矿综采工作面透明化数字孪生自适应开采系统和方法,该发明构建数字孪生三维虚拟开采系统,通过信息驱动虚拟场景中的孪生模型,实现井下采煤作业场所的感知、监控、预测等功能。
4.数字孪生技术的核心要素是模型和数据,基于海量数据分析结果驱动仿真模型运行,从而决策实际工作面装备运行情况。上述发明方案尽管能够完成煤矿综采工作面的仿真和数据分析,但模型仿真与数据分析集成式系统架构无法充分发挥数字孪生技术的性能,长时海量数据存储和处理会严重影响虚拟模型的计算性能,造成虚拟模型失真、控制信号延迟、系统卡顿等问题;此外,综采工作面数字孪生系统的根本目的是通过设备仿真模型有效决策和控制实际综采面装备开采,方案未能实现。
技术实现要素:
5.有鉴于此,本发明实施例提供一种煤矿综采工作面三维虚拟仿真决策分布式系统,有利于增强虚拟仿真系统的鲁棒性和安全可靠性,提高数据资源的可共享性;同时可实现虚拟综采工作面与实体综采工作面的同步监测和决策控制。
6.为达到上述发明目的,本发明采用具体技术方案如下:
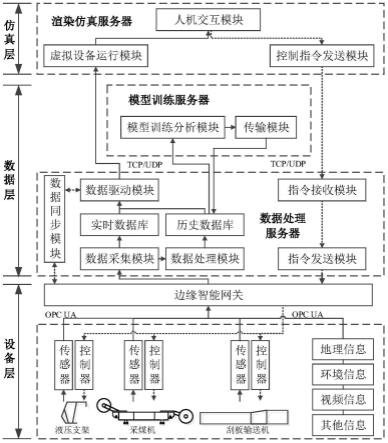
7.本发明实施例提供一种煤矿综采工作面三维虚拟仿真决策分布式系统,包括煤机装备实体、边缘智能网关、数据处理服务器、模型训练服务器和渲染仿真服务器;所述煤机装备实体、边缘智能网关、数据处理服务器、模型训练服务器和渲染仿真服务器在物理架构上呈设备层、数据层及仿真层的三级分布式架构,各层级间具备物理隔离防护,并采用标准化网络通讯协议进行通信;
8.所述煤机装备实体至少包括液压支架、采煤机、刮板机、破碎机、转载机及其状态监测传感器和plc控制器;
9.所述的边缘智能网关用于实时采集所述煤机装备实体状态监测传感器的监测数据,并进行数据预处理和数据传输;
10.所述的数据处理服务器用于实现数据存储、统计分析和数据分发及驱动;
11.所述的模型训练服务器用于对多源感知数据、视频数据以及历史数据进行综合分析挖掘,通过训练实现系统监控数据的特征识别与预测,并构建工作面装备实体动作预测模型,将训练好的模型发送至数据处理服务器运行;
12.所述的渲染仿真服务器用于构建和运行虚拟场景与仿真模型,根据数据处理服务器计算结果驱动仿真模型完成虚拟动作,并进行模型渲染与可视化展示。
13.进一步地,所述边缘智能网关采集的数据至少包括工作面地理信息数据、工作面煤机装备实体状态监测数据、工作面环境监测数据及工作面视频监测数据;
14.所述的工作面地理信息数据具体是:在工作面巷道及切眼掘进完毕后,通过巷道顶底板扫描、定向钻探及物探方式得到的工作面切眼顶底板高度数据和工作面两巷顶底板高度数据;
15.所述工作面煤机装备实体状态监测数据至少包括:液压支架、采煤机、刮板机、破碎机及转载机等运行状态监测传感器数据;
16.所述工作面环境监测数据至少包括人员定位数据、顶板压力数据、通风瓦斯数据及温度数据;
17.所述工作面视频监测数据具体指利用安装在液压支架的摄像头采集的视频图像进行检测的数据,至少包括多个液压支架护帮板的打开角度、多个刮板机的位置。
18.进一步地,所述边缘智能网关,具体用于自适应识别所述煤机装备实体状态监测传感器的通讯协议,对采集数据进行包括滤波、去除粗大误差、点表对应、特征提取及视频图像特征识别在内的预处理,,并实现数据实时采集与控制指令的双向高效传输。
19.进一步地,所述数据处理服务器包括数据采集模块、实时数据库、历史数据库、数据处理模块、数据驱动模块、数据同步模块、指令接收模块和指令发送模块组成。
20.所述数据采集模块,用于采集所述边缘智能网关传输的煤机装备实体的监测传感器的状态数据和plc控制器的控制数据,环境数据、视频识别数据等;
21.所述实时数据库,用于存储驱动工作面虚拟仿真动作的实时数据;
22.所述历史数据库,用于存储所述数据采集模块采集的全部数据和所述数据处理模块处理后的数据;
23.所述数据处理模块,用于对数据进行统计分析和特征挖掘,具体为对所有采集到的数据进行时间戳对应检测及处理、基于支架工作阻力提取支架循环末阻力和初撑力、基于液压支架顶梁倾角、掩护梁倾角和底座倾角计算支架采高以及基于立柱工作阻力和倾角数据计算支架顶梁受力和受力作用点;
24.所述数据驱动模块,用于定时将所需数据发送至所述渲染仿真服务器,以驱动虚拟设备运行;
25.所述的数据同步模块,用于将边缘智能网关、数据处理服务器、渲染仿真服务器之间的数据进行时间同步;
26.所述指令接收模块,用于接收来自所述渲染仿真服务器的控制指令发送模块的控制信号;
27.所述指令发送模块,用于发送所述控制信号至所述煤机装备实体的plc控制器。
28.进一步地,为满足所述渲染仿真服务器的三维仿真模型与所述物理实体的液压支架、采煤机、刮板机、破碎机及转载机装备运动的同步性或最小时延性的要求,所述数据同
步模块定时发送数据采集指令至边缘智能网关和数据驱动模块,以保证数据驱动模块的发送数据频率和边缘智能网关的数据采集频率相同;或者,由于个别传感器的采样频率无法统一,所述边缘智能网关实际数据采样频率较低,无法与数据驱动模块的发送数据频率保持一致时,所述数据同步模块用于使数据驱动模块在边缘智能网关没有采集到实际数据的时刻使用上一时刻的数据驱动三维虚拟模型,直至边缘智能网关采集到新数据,再使用新数据驱动三维虚拟模型。
29.进一步地,所述的模型训练服务器包括模型训练分析模块和传输模块,所述模型训练分析模块具体用于根据采集到的立柱压力建立液压支架载荷预测模型、根据支架循环末阻力和初撑力建立支架循环末阻力和初撑力预测模型、基于支架循环末阻力对来压步距判断、基于立柱工作阻力对支架工况聚类分析、根据采集到的采煤机滚筒高度建立采煤机滚筒高度预测模型、根据计算得到的液压支架采高建立液压支架采高预测模型、基于液压支架顶梁倾角和底座倾角数据进行工作面顶板和底板截割曲线分析、以及根据支架推移千斤顶的推移数据建立支架推移直线度超前预测模型;所述传输模块用于将所述模型训练分析模块分析和预测结果传输至所述数据处理服务器的历史数据库。
30.进一步地,所述的渲染仿真服务器包括:虚拟设备运行模块、控制指令发送模块和人机交互模块组成;
31.所述虚拟设备运行模块包括:液压支架三维虚拟模型、采煤机三维虚拟模型、刮板输送机三维虚拟模型、破碎机三维虚拟模型、转载机三维虚拟模型以及采场环境三维虚拟模型;
32.所述控制指令发送模块,用于向所述数据处理服务器的指令接收模块发送虚拟设备控制信号;
33.所述人机交互模块,用于可视化所述虚拟设备运行模块的运行情况,并控制所述液压支架三维虚拟模型的升高、降低、移架、推溜、收回护帮板、打开护帮板等操作,控制所述采煤机三维虚拟模型至少执行启动、停止、滚筒调高、调速操作,以及控制刮板输送机三维虚拟模型、破碎机三维虚拟模型和转载机三维虚拟模型至少执行启动和停止操作。
34.另一方面,所述煤矿综采工作面三维虚拟仿真决策分布式系统具有三种运行模式,分别为时序动作仿真模式、实时数据驱动运行模式和数据驱动仿真优化模式;
35.所述时序动作仿真模式是指无实际数据进出所述渲染仿真服务器的虚拟设备运行模块,通过所述人机交互模块对所述液压支架三维虚拟模型、采煤机三维虚拟模型、刮板输送机三维虚拟模型、破碎机三维虚拟模型、转载机三维虚拟模型进行启动、停止和动作操作控制的一种运行模式;
36.在所述时序动作仿真模式下,所述人机交互模块用于对所述液压支架三维虚拟模型进行升架、降架、推溜、移架、护帮板和成组推溜控制,对采煤机三维虚拟模型进行启动、停止、滚筒高度、速度的控制和调整,对刮板输送机三维虚拟模型、破碎机三维虚拟模型和转载机三维虚拟模型进行启动和停止的控制;
37.所述实时数据驱动运行模式是指利用所述数据处理服务器的数据采集模块实时采集综采数据,利用所述数据驱动模块定时将所需数据发送至所述渲染仿真服务器,驱动所述渲染仿真服务器的虚拟设备运行模块中的各个三维虚拟模型,并对实际生产中的所述煤机装备实体运行状态进行实时监测的一种运行模式;
38.所述数据驱动仿真优化模式是指利用存储在所述数据处理服务器的历史数据库的一定数量的数据,将其传输至所述模型训练服务器的模型训练分析模块进行预测分析,利用结果数据驱动所述渲染仿真服务器的虚拟设备运行模块中的各个三维虚拟模型的一种运行模式。
39.进一步地,在所述数据驱动仿真优化模式下,渲染仿真服务器利用存储在所述数据处理服务器的数据库的一定数量的历史数据,和所述模型训练服务器的模型训练分析模块,进行相关指标预测模型的训练,得出多组预测分析结果数据,再利用所述数据驱动模块定时将数据发送至所述渲染仿真服务器,以驱动所述渲染仿真服务器的虚拟设备运行模块中的各个三维虚拟模型,验证预测分析结果数据开采效果;其中,所述相关指标预测模型至少包含:立柱压力建立液压支架载荷预测模型、支架循环末阻力和初撑力预测模型、采煤机滚筒高度预测模型、液压支架采高预测模型及支架推移直线度超前预测模型。
40.本发明的有益效果在于:
41.本发明能够提供一种煤矿综采工作面三维虚拟仿真决策分布式系统,所述系统具备模型仿真和数据处理分布式架构,可通过部署数据处理服务器、模型训练服务器和渲染仿真服务器分别完成模型的计算功能和数据的采集存储和处理功能,有利于数字孪生系统充分发挥计算性能,增强系统的鲁棒性、安全可靠性和计算迁移能力,提高数据资源的可共享性。同时,系统通过边缘智能网关,可实现综采工作面多源数据实时采集,数据预处理,有利于整个系统数据驱动的快捷性。
附图说明
42.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图。
43.图1是本发明煤矿综采工作面三维虚拟仿真决策分布式系统一实施例架构示意图。
具体实施方式
44.下面结合附图对本发明实施例进行详细描述。
45.应当明确,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
46.参看图1,本发明实施例提供的煤矿综采工作面三维虚拟仿真决策分布式系统包括煤机装备实体、边缘智能网关、数据处理服务器、模型训练服务器和渲染仿真服务器;所述煤机装备实体、边缘智能网关、数据处理服务器、模型训练服务器和渲染仿真服务器在物理架构上呈设备层、数据层及仿真层的三级分布式架构,各层级间具备物理隔离防护,并采用标准化网络通讯协议进行通信;如图1所示,从设备层至仿真层为数据上行,用实线箭头表示,从仿真层至设备层为数据下行,用虚线箭头表示,双向虚线箭头为数据同步指令要求。
47.所述煤机装备实体至少包括液压支架、采煤机、刮板机、破碎机、转载机及其状态监测传感器和plc控制器;
48.所述的边缘智能网关用于实时采集所述煤机装备实体状态监测传感器的监测数据,并进行数据预处理和数据传输;
49.所述的数据处理服务器用于实现数据存储、统计分析和数据分发及驱动;
50.所述的模型训练服务器用于对多源感知数据、视频数据以及历史数据进行综合分析挖掘,通过训练实现系统监控数据的特征识别与预测,并构建工作面装备实体动作预测模型,将训练好的模型发送至数据处理服务器运行;
51.所述的渲染仿真服务器用于构建和运行虚拟场景与仿真模型,根据数据处理服务器计算结果驱动仿真模型完成虚拟动作,并进行模型渲染与可视化展示。
52.进一步地,所述边缘智能网关采集的数据至少包括工作面地理信息数据、工作面煤机装备实体状态监测数据、工作面环境监测数据、工作面视频监测数据等;
53.所述的工作面地理信息数据具体指的是,在工作面巷道及切眼掘进完毕后,通过巷道顶底板扫描、定向钻探及物探等方法得到的工作面切眼顶底板高度数据和工作面两巷顶底板高度数据;
54.所述工作面煤机装备实体状态监测数据至少包括:液压支架、采煤机、刮板机、破碎机及转载机等运行状态监测传感器数据;
55.所述工作面环境监测数据至少包括人员定位数据、顶板压力数据、通风瓦斯数据、温度数据等;
56.所述工作面视频监测数据具体指利用安装在液压支架的摄像头采集的视频图像进行检测的数据,至少包括多个液压支架护帮板的打开角度、多个刮板机的位置等,以确保整个系统模型驱动数据的全面性。
57.进一步地,所述边缘智能网关,其特征在于能够自适应识别所述煤机装备实体状态监测传感器的通讯协议,可对采集数据进行预处理,包括滤波、去除粗大误差、点表对应、特征提取,视频图像特征识别等,并实现数据实时采集与控制指令的双向高效传输。
58.所述点表对应是指将预定位置的压力传感器采集的数据与数据库中的映射表关联起来;例如,有一个1号压力传感器,然后在数据库系统中可标注为001表,将1号压力传感器采集的对应的数据存储到这个001标识的数据库映射表中。
59.进一步地,所述数据处理服务器包括数据采集模块、实时数据库、历史数据库、数据处理模块、数据驱动模块、数据同步模块、指令接收模块和指令发送模块组成。
60.所述数据采集模块,用于采集所述边缘智能网关传输的煤机装备实体的监测传感器的状态数据和plc控制器的控制数据,环境数据、视频识别数据等;
61.所述实时数据库,用于存储驱动工作面虚拟仿真动作的实时数据;
62.所述历史数据库,用于存储所述数据采集模块采集的全部数据和所述数据处理模块处理后的数据;
63.所述数据处理模块,用于对数据进行统计分析和特征挖掘,具体为对所有采集到的数据进行时间戳对应检测及处理、基于支架工作阻力提取支架循环末阻力和初撑力、基于液压支架顶梁倾角、掩护梁倾角和底座倾角计算支架采高以及基于立柱工作阻力和倾角数据计算支架顶梁受力和受力作用点;
64.在一些实施例中,所述数据处理模块,具体还用于对所有采集到的数据进行时间戳对应检测及处理、基于支架工作阻力提取支架循环末阻力和初撑力、基于液压支架顶梁倾角、掩护梁倾角和底座倾角计算支架采高以及基于立柱工作阻力和倾角数据计算支架顶梁受力和受力作用点;
65.其中,对所有采集到的数据进行时间戳对应检测及处理包含:检测采集到的各液压支架的数据对应的时间戳是否连续或存在缺失,若不连续或存在缺失,则对各液压支架的数据进行插值处理。
66.示例性地,若某个支架2在2021.01.01 12:01:04采集到了数据,在2021.01.01 12:01:05没有采集到数据,在2021.01.01 12:01:06又采集到了数据,因此,则在检测到时间戳为2021.01.01 12:01:05时数据缺失或不连续,则采用插值处理方法将上一相邻时间戳采集的数据,即用2021.01.01 12:01:04采集的数据补充至2021.01.01 12:01:05时刻,以将采集的数据拟合成连续曲线,便于后续的计算分析。
67.所述数据驱动模块,用于定时将所需数据发送至所述渲染仿真服务器,以驱动虚拟设备运行;
68.所述的数据同步模块,用于将边缘智能网关、数据处理服务器、渲染仿真服务器之间的数据进行时间同步;
69.所述指令接收模块,用于接收来自所述渲染仿真服务器的控制指令发送模块的控制信号;
70.所述指令发送模块,用于发送所述控制信号至所述煤机装备实体的plc控制器。
71.进一步地,为满足所述渲染仿真服务器的三维仿真模型与所述物理实体的液压支架、采煤机、刮板机、破碎机及转载机装备运动的同步性或最小时延性的要求,所述数据同步模块定时发送数据采集指令至边缘智能网关和数据驱动模块,以保证数据驱动模块的发送数据频率和边缘智能网关的数据采集频率相同;或者,由于个别传感器的采样频率无法统一,所述边缘智能网关实际数据采样频率较低,无法与数据驱动模块的发送数据频率保持一致时,数据同步模块要求数据驱动模块在边缘智能网关没有采集到实际数据的时刻使用上一时刻的数据驱动三维虚拟模型,直至边缘智能网关采集到新数据,再使用新数据驱动三维虚拟模型。
72.进一步地,所述的模型训练服务器包括模型训练分析模块和传输模块,所述模型训练分析模块具体用于根据采集到的立柱压力建立液压支架载荷预测模型、根据支架循环末阻力和初撑力建立支架循环末阻力和初撑力预测模型、基于支架循环末阻力对来压步距判断、基于立柱工作阻力对支架工况聚类分析、根据采集到的采煤机滚筒高度建立采煤机滚筒高度预测模型、根据计算得到的液压支架采高建立液压支架采高预测模型、基于液压支架顶梁倾角和底座倾角数据进行工作面顶板和底板截割曲线分析、以及根据支架推移千斤顶的推移数据建立支架推移直线度超前预测模型;所述传输模块用于将所述模型训练分析模块分析和预测结果传输至所述数据处理服务器的历史数据库。
73.进一步地,所述的渲染仿真服务器包括虚拟设备运行模块、控制指令发送模块和人机交互模块;
74.所述虚拟设备运行模块包括:液压支架三维虚拟模型、采煤机三维虚拟模型、刮板输送机三维虚拟模型、破碎机三维虚拟模型、转载机三维虚拟模型以及采场环境三维虚拟
模型;
75.所述控制指令发送模块,用于向所述数据处理服务器的指令接收模块发送虚拟设备控制信号;
76.所述人机交互模块,用于可视化所述虚拟设备运行模块的运行情况,并控制所述液压支架三维虚拟模型的升高、降低、移架、推溜、收回护帮板、打开护帮板等操作,控制所述采煤机三维虚拟模型至少执行启动、停止、滚筒调高、调速操作,以及控制刮板输送机三维虚拟模型、破碎机三维虚拟模型和转载机三维虚拟模型至少执行启动和停止操作。
77.作为一可选地实施例,所述数据驱动模块定时发送数据的时间为1s,发送数据包含液压支架升架开关量、降架开关量、移架开关量、推溜开关量、成组推溜开关量、成组推溜支架个数、液压支架立柱压力、液压支架顶梁掩护梁和底座倾角、采煤机上行下行信号、左右滚筒高度、采煤机位置(液压支架架号)、采煤机牵引速度、刮板输送机运行状态、破碎机运行状态和转载机运行状态;
78.对于综采工作面倾向方向非连续监测采样点的数据,所述数据处理模块利用插值算法进行数据插值补充之后,再通过数据驱动模块发送至所述渲染仿真服务器。
79.另一方面,所述系统具有三种运行模式,分别为时序动作仿真模式、实时数据驱动运行模式和数据驱动仿真优化模式;
80.所述时序动作仿真模式是指无实际数据进出所述渲染仿真服务器的虚拟设备运行模块,仅通过所述人机交互模块对所述液压支架三维虚拟模型、采煤机三维虚拟模型、刮板输送机三维虚拟模型、破碎机三维虚拟模型、转载机三维虚拟模型进行启动、停止和动作操作控制的一种运行模式;
81.在所述时序动作仿真模式下所述人机交互模块用于对所述液压支架三维虚拟模型进行升架、降架、推溜、移架、护帮板和成组推溜控制,对采煤机三维虚拟模型进行启动、停止、滚筒高度、速度的控制和调整,对刮板输送机三维虚拟模型、破碎机三维虚拟模型和转载机三维虚拟模型进行启动和停止的控制;
82.所述实时数据驱动运行模式是指利用所述数据处理服务器的数据采集模块实时采集综采数据,利用所述数据驱动模块定时将所需数据发送至所述渲染仿真服务器,驱动所述渲染仿真服务器的虚拟设备运行模块中的各个三维虚拟模型,并对实际生产中的所述煤机装备实体运行状态进行实时监测的一种运行模式;
83.所述数据驱动仿真优化模式是指利用存储在所述数据处理服务器的历史数据库的一定数量的数据,将其传输至所述模型训练服务器的模型训练分析模块进行预测分析,利用结果数据驱动所述渲染仿真服务器的虚拟设备运行模块中的各个三维虚拟模型的一种运行模式。
84.具体的,在所述数据驱动仿真优化模式下,所述系统通过所述数据驱动模块发送一段时间内的历史数据至渲染仿真服务器;
85.所述渲染仿真服务器,用于根据所述历史数据驱动虚拟设备运行模块中的各个三维虚拟模型运行,通过所述各个三维虚拟模型追溯该时间段内实际生产出现异常情况的具体原因;或者,
86.在所述数据驱动仿真优化模式下,所述系统利用存储在所述数据服务器的数据库的一定数量的历史数据,和所述模型训练服务器的模型训练分析模块,进行相关指标预测
模型的训练,得出多组预测分析结果数据,再利用所述数据驱动模块定时将数据发送至所述渲染仿真服务器,以驱动所述渲染仿真服务器的虚拟设备运行模块中的各个三维虚拟模型,验证预测分析结果数据开采效果;其中,所述相关指标预测模型包含:立柱压力建立液压支架载荷预测模型、支架循环末阻力和初撑力预测模型、采煤机滚筒高度预测模型、液压支架采高预测模型及支架推移直线度超前预测模型。
87.本实施例中,在所述数据驱动仿真优化模式下,可利用一段时间内的历史数据去驱动所述模型服务器的虚拟设备运行模块中的各个三维虚拟模型,可用于追溯该时间段内实际生产出现异常情况的具体原因。
88.另外,利用存储在所述数据处理服务器的数据库的一定数量的历史数据,和所述模型训练服务器的模型训练分析模块,进行相关指标预测模型的训练,得出多组预测分析结果数据,再利用所述数据驱动模块定时将数据发送至所述模型服务器,以驱动所述模型服务器的虚拟设备运行模块中的各个三维虚拟模型,验证预测分析结果数据开采效果。
89.综上,本发明煤矿综采工作面三维虚拟仿真决策分布式系统,采用模型仿真和数据处理分布式架构,即将模型仿真和数据处理部署于不同服务器或工作站,分别完成模型的计算功能和数据的采集存储和处理功能,并在二者之间通过高效通讯方式实现数据驱动模型(上行)和控制信号传输(下行),有利于数字孪生系统充分发挥计算性能,增强系统的鲁棒性和安全可靠性,提高数据资源的可共享性。
90.需要说明的是,在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
91.本说明书中的各个实施例均采用相关的方式描述,各个实施例之间相同相似的部分互相参见即可,每个实施例重点说明的都是与其他实施例的不同之处。
92.本领域普通技术人员可以理解实现上述实施例方法中的全部或部分流程,是可以通过计算机程序来指令相关的硬件来完成,所述的程序可存储于一计算机可读取存储介质中,该程序在执行时,可包括如上述各方法的实施例的流程。其中,所述的存储介质可为磁碟、光盘、只读存储记忆体(read及only memory,rom)或随机存储记忆体(random access memory,ram)等。
93.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。