1.本发明属于办公设备技术领域,特别涉及一种升降桌。
背景技术:
2.学生或劳动者使用桌子学习或办公时,出于身体情况、具体处理事务或自身喜好,往往会需求改变桌面高度和角度;如学生画图时,如图纸幅面较大,往往需要大角度调整桌面角度,抬升桌面使其翻起,方便学生可以轻松够到远处图纸,合理布置整个图纸的画面布局;而对于使用笔记本电脑工作的劳动者,其在长期伏案工作的过程中,出于自身办公习惯,往往需求小角度调整桌面角度,稍微抬起桌面,将电脑键盘的角度调整至更适合敲击的角度位置上,以便获得更轻松、舒适的键盘手感。
3.为实现上述功能,现有技术中通常以纯机械结构形式或机械结构与气压元件组合的形式来构造书桌。
4.在申请号为“202023306422.1”的中国专利申请文件中记载了一种翻板升降桌,其中即记载:包括桌面,桌面背部安装有支撑架,支撑架上连接有升降柱,所述桌面包括固定板与翻板,所述固定板固定安装在支撑架上,所述翻板转动连接在支撑架上,翻板与支撑架之间设置有支撑杆,所述翻板处于水平状态时与固定板组成水平桌面,翻板转动后通过支撑杆支撑使其保持倾斜状态。该专利申请文件中所载翻转升降桌即为现有技术中典型的以纯结构结构构造具有桌面倾斜功能的升降桌的形式。
5.上述专利申请文件中所载技术方案应用到实际中时,由于其倾斜状态需要通过支撑杆支撑保持,用户使用该技术方案提供的升降桌时,必须手动抬起翻板,支起支撑杆使其保持倾斜状态抵持翻板才能调整桌面的倾斜角度,这样的调整过程不仅操作繁琐、不利于年龄较小的用户单独操作,用户将倾斜状态下的翻板收回的过程中,如果没有事先抓稳翻板,翻板失去支撑杆支撑的瞬间还容易急速落下砸伤人手,存在一定的安全隐患。
6.现有技术中以机械结构与气压元件组合实现桌面倾斜的形式也被广泛应用在不同的升降桌中;以申请号为“202120217932.7”的中国专利申请文件为例,在该专利申请文件中即记载了一种防夹的气动升降桌,其中即详细记载:包括升降立柱和桌板,所述升降立柱包括伸缩套管和设于所述伸缩套管内部以驱动伸缩套管伸缩的气弹簧,所述气弹簧包括阀门开关,所述伸缩套管的顶部转动安装有用于按压所述阀门开关的扳手,所述升降立柱顶部固定设有位于所述桌板下方的安装座,所述桌板的一侧铰接在所述安装座上,所述桌板上设有应急开关,所述应急开关与所述扳手通过控制线连接,向上翻转所述桌板以使所述应急开关拉动所述控制线,所述控制线拉动所述扳手转动并按压所述阀门开关以控制所述升降立柱上升。
7.从上述专利申请文件记载中不难看出,上述专利申请文件中所载技术方案应用到实际中时,由于气弹簧以阀门开关控制工作,而阀门开关则必须以人力掰动扳手后控制其通断,但在具体生活中,具体使用具有桌面倾斜功能的升降桌的用户中不乏学龄儿童,儿童力气不够,很难自行掰动扳手调整桌面倾斜角度;而与此同时,由于上述气弹簧自身为压力
器件,其在使用过程中必须严格保证气密性,一旦气弹簧自身气密性被破坏,将非常容易发生漏气失效甚至爆炸的危险,安全性和稳定性较差,长时间使用将存在安全隐患,不利于广泛使用。
技术实现要素:
8.为解决上述问题,本发明的目的在于提供一种升降桌,该升降桌以电动推杆组件与倾斜桌面组件的配合实现桌面倾斜,解决现有技术中桌面倾斜功能操作困难的问题。
9.本发明的另一个目的在于提供一种具有防夹手功能的升降桌,该升降桌结构简洁、升降方便、桌面倾斜时结构稳固可靠,桌面角度调整过程中还具备防夹手功能,方便各个年龄层用户使用。
10.为实现上述目的,本发明的技术方案如下:
11.一种具有防夹手功能的电动倾斜桌面的升降桌,该升降桌包括有升降桌体、电动推杆组件、倾斜桌面组件以及用于感应是否有人体部位被夹住的触摸传感器,:倾斜桌面组件设置在升降桌体上,与升降桌体连接;电动推杆组件的机身与升降桌体连接,其推杆伸出抵持倾斜桌面组件的下表面,触摸传感器设置在升降桌体与倾斜桌面组件之间,且触摸传感器还与电动推杆组件交互。触摸传感器为电容型触摸传感器、压力型触摸传感器、红外感应型触摸传感器中一种或多种组合。
12.电动推杆组件以电力驱动,将其与外部电源连接后,电动推杆组件在外部电源的控制下工作,改变外部电源与电动推杆组件的通断情况及控制情况,即可非常方便地改变电动推杆组件的工作情况,改变电动推杆组件的长度,进而控制倾斜桌面组件被顶起、以一定角度倾斜,或回落、与升降桌体齐平。使用电动推杆组件顶起或收回倾斜桌面组件,由于电动推杆组件以外部电源驱动、内部电-磁-力转换以对外输出驱动力,实现方便、控制便捷、能大幅提升用户的使用好感。
13.设置触摸传感器将为本技术提供的升降桌提供控制基础,将触摸传感器设置在升降桌体与倾斜桌面组件之间,则当倾斜桌面组件被电动推杆顶起倾斜时,触摸传感器将实时感受升降桌体与倾斜桌面组件之间的空间,如触摸传感器感应到用户触摸,则代表此时用户存在身体部位被夹的危险,触摸传感器将通过与电动推杆组件的交互将该情况反馈给电动推杆组件,控制电动推杆组件停止工作以保护用户,避免被夹。
14.本技术提供的升降桌应用到实际中时,触摸传感器根据具体使用场景需求,可选用电容型触摸传感器、光电型触摸传感器、红外线感应型触摸传感器等具体传感器应用其中,本领域技术人员可根据本技术记载选用具体使用的传感器类型及型号。
15.在本技术提供的技术方案中,升降桌体包括有桌面支撑架、第一桌面以及至少一个电动升降支柱;电动升降支柱设置在桌面支撑架的下方,且每一个电动升降支柱均与桌面支撑架连接,电动升降支柱伸长或缩短时,桌面支撑架随之升降;第一桌面设置在桌面支撑架上方,且第一桌面与桌面支撑架连接。
16.进一步地,每一个电动升降支柱中均包括有支撑桌脚、支柱套管以及升降电机;支撑桌脚放置在支柱套管下方,支撑套管的下部与支撑桌脚连接;升降电机的机身与桌面支撑架连接,其电机输出轴伸出,伸入支柱套管中。第一桌面设置在桌面支撑架上,当升降电机工作时,桌面支撑架随之升降,带动第一桌面升降,进而实现桌面高度调节,升降电机自
身的控制是现有技术,并非本技术要求的保护核心,本领域技术人员通过查阅技术资料,即可非常方便地实施该技术方案。
17.进一步地,电动推杆组件包括有推杆支架以及电动推杆;推杆支架设置桌面支撑架的下方,与桌面支撑架连接,电动推杆的机身与推杆支架连接,电动推杆的推杆伸出,与倾斜桌面组件铰接。电动推杆作为一种直线执行机构,将其与外部电源连接后,其推杆将受控伸长或缩短,在一定行程内做往复运动,将电动推杆的推杆与倾斜桌面组件铰接,则电动推杆将为倾斜桌面组件提供动力,推动倾斜桌面组件倾斜或回落。将电动推杆应用在升降桌中,将其作为倾斜桌面组件的倾斜执行机构为倾斜桌面组件提供驱动力,不仅可减少现有技术中应用气缸等气动元件作为执行机构所需的气源装置和辅助设备,也避免了应用气动元件作为动力来源时气动元件自身的危险性和不稳定性,采用电动推杆作为动力源,将其用于推动倾斜桌面组件时,其推杆伸出长度、保持位置、缩回距离等均仅需执行电动推杆自身的控制操作即可达到预期,使用过程非常方便。
18.应该申明,本技术提供的技术方案应用到实际中时,为更方便用户操作,本领域技术人员可视具体应用场景需求,将升降电机和电动推杆的控制交互端口集成为一体,以固定式控制按钮或遥控器等形式向用户开放,方便用户按需操作以控制平台高度以及倾斜角度,升降电机和电动推杆的控制端口是其自身结构的一部分,其各自的工作原理以及控制方式均是成熟且广为应用的,本领域技术进人仅需查阅不同生产厂商提供的技术资料,选用合适的型号应用其中即可实施本技术提供的技术方案,升降电机和电动推杆自身的工作原理及其控制方式并非本技术的保护核心,不在本技术要求保护的范围内,而所有在本技术提供的技术方案的基础上,对升降电机和电动推杆作出简单变形也应包括在本技术要求的保护范围内。
19.进一步地,倾斜桌面组件包括有第二桌面、支架铰链以及推杆铰链;第二桌面设置在桌面支撑架的上方、第一桌面旁;支架铰链设置在桌面支撑架与第二桌面之间,用于连接二者;推杆铰链设置在电动推杆的推杆与第二桌面之间,用于连接二者。电动推杆通过推杆支架与桌面支撑架连接,则电动推杆将以桌面支撑架为施力基础,当其推杆伸长时,将抵持第二桌面将其顶起,由于第二桌面通过支架铰链与桌面支撑架铰接,则当推杆伸长时,第二桌面将以支架铰链为旋转中心绕其铰接点旋转,第二桌面的倾斜角度得到改变。
20.进一步地,触摸传感器铺设在桌面支撑架面向第二桌面一侧的位置处。当电动推杆的推杆伸长,第二桌面被顶起时,第二桌面将远离桌面支撑架,触摸传感器暴露出来,能充分感受用户的触摸并及时将触摸信号与电动推杆交互,此时一旦用户误将手、胳膊等人体部位放置在第二桌面与桌面支撑架之间,触摸传感器将及时感应到,及时反馈控制电动推杆工作,避免用户被夹。
21.进一步地,第二桌面与第一桌面之间留存防夹手间隙。当电动推杆缩至最短,第二桌面将被完全放下至与第一桌面齐平的高度位置。而当第二桌面完全放下至与第一桌面齐平的高度位置处时,第二桌面与第一桌面之间留存的防夹手间隙将为用户留出足够空间,避免用户在第二桌面升降的过程中被第一桌面与第二桌面共同挤压夹伤。
22.进一步地,该升降桌还包括有桌面置物架;桌面置物架设置在升降桌体的上方,与升降桌体连接。设置桌面置物架有利于拓展第一桌面上方空间,方便用户放置书籍、台灯、文具等日常用品。
23.进一步地,该升降桌还包括有用于监控用户坐姿、帮助用户矫正不良坐姿的坐姿检测器;坐姿检测器设置在桌面置物架上,与桌面置物架可拆卸式连接。坐姿检测器中内置事先完成训练的坐姿检测模型,该模型可接收前端检测数据,对前端检测数据进行自主分析,并给出用户当前坐姿优劣的判断。保持坐姿检测器的检测端面朝用户,坐姿检测器本身将通过红外线、视觉、毫米雷达波等检测手段检测用户的实施坐姿以及实时用眼距离等参数,检测到上述实时数据后,实时数据送入坐姿检测模型中,如坐姿检测模型判断用户当前存在坐姿歪斜、用眼距离过近等不良姿态,坐姿检测器将通过自身自带的声音、闪光等手段提醒用户矫正坐姿。设置坐姿检测器对于学龄用户而言可以帮助其养成良好的学习习惯,健康成长;对于成年用户而言,设置坐姿检测器也将帮助成年用户保持良好办公姿态,避免长时间以不良坐姿伏案工作对成年用户的身体造成不良影响,有利于与成年人身体健康。
24.本发明的优势在于:相比于现有技术,在本技术中提供的升降桌结构简洁、桌面的升降、倾斜过程均十分方便稳定,方便各个年龄层用户使用。
附图说明
25.图1是具体实施方式中提供的具有防夹手功能的电动倾斜桌面的升降桌的第一视角整体结构示意图。
26.图2是具体实施方式中提供的具有防夹手功能的电动倾斜桌面的升降桌的第二视角整体结构示意图。
27.图3是具体实施方式中提供的具有防夹手功能的电动倾斜桌面的升降桌的第三视角整体结构示意图。
28.图4是具体实施方式中提供的具有防夹手功能的电动倾斜桌面的升降桌的第四视角整体结构示意图。
具体实施方式
29.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
30.为实现上述目的,本发明的技术方案如下:
31.请参阅图1-4。
32.在本具体实施方式中提供一种具有防夹手功能的电动倾斜桌面的升降桌,该升降桌包括有升降桌体1、电动推杆组件2以及倾斜桌面组件3:倾斜桌面组件3设置在升降桌体1上,与升降桌体2连接;电动推杆组件3的机身与升降桌体2连接,其推杆伸出抵持倾斜桌面组件3的下表面。
33.进一步的,在本具体实施方式中,该升降桌还包括有用于感应是否有人体部位被夹住的触摸传感器(图未示),该触摸传感器设置在升降桌体1与倾斜桌面组件3之间,且触摸传感器还与电动推杆组件2交互。
34.进一步的,在本具体实施方式中,触摸传感器为电容型触摸传感器、压力型触摸传感器、红外感应型触摸传感器中一种或多种组合。
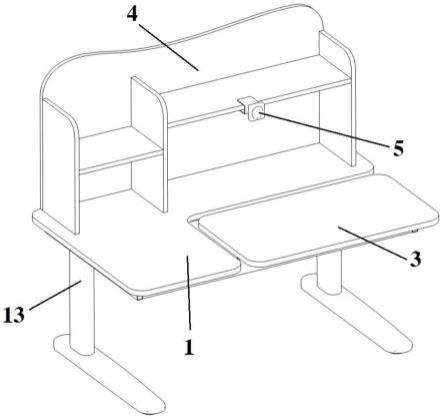
35.进一步的,在本具体实施方式中,升降桌体1包括有桌面支撑架11、第一桌面12以
及至少一个电动升降支柱13;电动升降支柱13设置在桌面支撑架11的下方,且每一个电动升降支柱13均与桌面支撑架11连接,电动升降支柱13伸长或缩短时,桌面支撑架11随之升降;第一桌面12设置在桌面支撑架11上方,且第一桌面12与桌面支撑架11连接。
36.进一步的,在本具体实施方式中,每一个电动升降支柱13中均包括有支撑桌脚131、支柱套管132以及升降电机133;支撑桌脚131放置在支柱套管132下方,支撑套管132的下部与支撑桌脚131连接;升降电机133的机身与桌面支撑架11连接,其电机输出轴伸出,伸入支柱套管132中。
37.进一步的,在本具体实施方式中,电动推杆组件2包括有推杆支架21以及电动推杆22;推杆支架21设置桌面支撑架11的下方,与桌面支撑架11连接,电动推杆22的机身与推杆支架21连接,电动推杆22的推杆伸出,与倾斜桌面组件3铰接。
38.进一步的,在本具体实施方式中,倾斜桌面组件3包括有第二桌面31、支架铰链32以及推杆铰链33;第二桌面31设置在桌面支撑架11的上方、第一桌面12旁;支架铰链32设置在桌面支撑架11与第二桌面31之间,用于连接二者;推杆铰链33设置在电动推杆22的推杆与第二桌面31之间,用于连接二者。
39.进一步的,在本具体实施方式中,触摸传感器铺设在桌面支撑架11面向第二桌面31一侧的位置处。
40.进一步的,在本具体实施方式中,第二桌面31与第一桌面12之间留存防夹手间隙a。
41.进一步的,在本具体实施方式中,该升降桌还包括有桌面置物架4;桌面置物架4设置在升降桌体1的上方,与升降桌体1连接。
42.进一步的,在本具体实施方式中,该升降桌还包括有用于监控用户坐姿、帮助用户矫正不良坐姿的坐姿检测器5;坐姿检测器5设置在桌面置物架4上,与桌面置物架4可拆卸式连接。
43.以上仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。