技术特征:
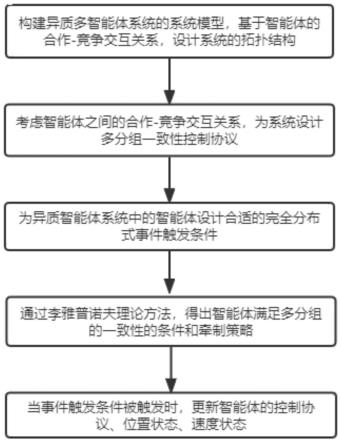
1.基于事件触发的异质无人系统集群协同控制方法,其特征在于,包括以下步骤:步骤1:根据智能体之间达到多分组一致性的前提是信息的交互,确定异质多智能体系统的拓扑结构,并全面考虑智能体之间的合作-竞争交互关系,对异质多智能体系统中的智能体进行分组,并设置每个智能体分组期望的收敛状态值;步骤2:异质多智能体系统包含一阶智能体和二阶智能体,其中一阶智能体只具有位置状态信息,二阶智能体具有位置状态信息和速度状态信息;步骤3:考虑系统中智能体间的合作-竞争交互关系,为系统中的智能体设置多分组一致性控制协议,并考虑智能体的测量误差和系统误差;同分组之间的智能体不仅具有合作交互关系也具有竞争交互关系,同时不同分组间的智能体也不仅具有合作交互关系也具有竞争交互关系;步骤4:为系统中每个智能体设计合适的事件触发条件,当智能体满足当前事件触发条件时,则与相邻的智能体进行相互通信,并更新控制协议;步骤5:基于李雅普诺夫方法构建智能体的牵制策略,同时得出智能体满足多分组一致性的条件;步骤6:基于多分组一致性控制协议的控制输入值,对其通过系统模型计算下一时刻智能体的位置状态信息和速度状态信息,并判断当前的位置状态值和速度状态值是否满足达到多分组一致性的条件,进一步地更新当前智能体的测量误差和全局误差,为了下一次触发做准备。2.根据权利要求1所述基于事件触发的异质无人系统集群协同控制方法,其特征在于:所述异质多智能体系统用动态方程表示为:其中,x
i
(t),v
i
(t)和μ
i
(t)分别为智能体的位置状态、速度状态和控制输入;i
m
和i
n-m
分别为一阶智能体集合和二阶智能体结合;代表智能体位置状态的导数,表示智能体速度状态的导数。3.根据权利要求1所述基于事件触发的异质无人系统集群协同控制方法,其特征在于:步骤3所述多分组一致性控制协议为:其中,k1,k2和k3是智能体控制协议的耦合强度;d
i
表示智能体的牵制增益;c
ij
表示系统中智能体间的交互关系,如果c
ij
=1,表示智能体间是合作交互关系;如果智能体间是竞争交互关系,则c
ij
=-1;x
j
和x
i
分别表示第j个和第i个智能体,a
ij
表示第i个智能体和第j个智
能体的拓扑关系,表示智能体i的相邻节点最近的一次触发时刻;表示智能体i的当前触发时刻;智能体i的下一个触发时刻,表示智能体j的当前分组最终状态;表示智能体i的当前分组最终状态,v
i
表示第i个智能体的速度状态,t当前时间,n
i
第i个智能体的邻居节点集合。4.根据权利要求3所述基于事件触发的异质无人系统集群协同控制方法,其特征在于:使用所述测量误差和全局误差来评判系统中的智能体是否达到分组一致性;其中,关于位置测量误差为:i
n
表示智能体的集合;关于速度测量误差为:关于邻居智能体的测量误差为:x
j
(t)第j个智能体;系统全局误差是当前智能体是否已经达到最终状态值的评判标准,将其设置为:5.根据权利要求4所述基于事件触发的异质无人系统集群协同控制方法,其特征在于:将多分组控制协议修改为:6.根据权利要求1所述基于事件触发的异质无人系统集群协同控制方法,其特征在于:步骤4所述事件触发条件包括一阶智能体和二阶智能体的完全分布式事件触发分别为:和
其中,k1=k1l
min
d
min
,和常数ε
i
∈[0,1);l表示常数,l
ii
第i个智能体的入度。7.根据权利要求1所述基于事件触发的异质无人系统集群协同控制方法,其特征在于:步骤5所述基于李雅普诺夫方法构建智能体的牵制策略为:运用设计的李雅普诺夫函数为:w(t)=w1(t) w2(t)其中,和n代表智能体的总个数,m表示一阶智能体的个数。保证系统中的智能体达到多分组一致性的充分条件为:k1l
ii
d
i
>0,i∈i
m
,k2l
ii
d
i
>0,i∈i
n-m
,k
3-1>0,i∈i
n-m
。8.根据权利要求1所述基于事件触发的异质无人系统集群协同控制方法,其特征在于:步骤6所述判断位置状态值和速度状态值是否满足达到多分组一致性条件的过程包括两个方面:一方面,判断系统中相同分组的位置状态信息是否相同;另一方面,判断二阶智能体的速度状态是否归零;用以下条件进行描述:条件一:其中,x
i
(t)代表智能体的位置状态信息,是第i个智能体所在的分组,当表示智能体i和智能体j位于相同的分组,当表示智能体i和智能体j位于不同的分组;条件二:其中,v
i
(t)代表智能体i的速度状态信息。
技术总结
本发明公开了基于事件触发的异质无人系统集群协同控制方法。无人系统集群控制是多智能体系统一致性协同控制的典型应用,因此,本专利使用多智能体系统进行具体描述。综合考虑智能体之间的合作和竞争交互关系,设计一种新的集群一致性协议,并提出不依赖全局信息的完全分布式事件触发条件。利于李雅普诺夫稳定性定理,得到异质多智能体系统达到多分组一致性的充分和条件,并讨论异质合作-竞争系统中的智能体的牵制策略,从而减少牵制智能体的个数,降低经济控制成本。最后,通过实例验证所提出事件触发的有效性。出事件触发的有效性。出事件触发的有效性。
技术研发人员:纪良浩 刘小椿 杨莎莎 郭兴 于南翔
受保护的技术使用者:重庆邮电大学
技术研发日:2022.03.10
技术公布日:2022/7/26
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。