1.本发明涉及根据权利要求1的前序部分所述的用于确定第一轴和第二轴之间的扭矩和/或旋转角度的装置,该第一轴和第二轴经由传动装置连结使得它们能够相对于彼此绕旋转轴线旋转。
背景技术:
2.已知,在移动轴,例如机器人的臂处使用旋转角度测量系统来控制电机,例如伺服电机,该旋转角度测量系统确定控制所需的信息,例如速度和旋转角度位置。电机通常具有驱动轴,该驱动轴将电机施加的力经由传动装置传递到从动轴。众所周知,传动装置是弹性和非线性的,这使得电机的转速在通过传动装置增加或降低传动比之后不会表现为线性。因此,负载下传动装置的弹性引起从动轴的预期旋转角度位置和从动轴的实际旋转角度位置之间的旋转角度偏移。在已知系统中,为了避免这种旋转角度偏移,在从动轴上布置有第二旋转角度测量系统,该第二旋转角度测量系统直接检测从动轴的运动。为了确定作用在两个轴之间的扭矩,使用附加的传感器,例如应变仪。总之,需要大量的传感器,因此这样的系统既复杂又昂贵。
技术实现要素:
3.因此,本发明的目的是提供一种用于确定第一轴和第二轴之间的扭矩和/或旋转角度的装置,该装置构造更简单并且可更廉价地制造。
4.根据本发明,该目的通过具有权利要求1的特征、一种用于确定第一轴和第二轴之间的扭矩和/或旋转角度的装置来实现。
5.本发明有利的设计方案和改进方案在从属权利要求中给出。
6.根据本发明的一种用于确定第一轴和第二轴之间的扭矩和/或旋转角度的装置,第一轴和第二轴通过传动装置相对于彼此绕旋转轴线可旋转地连结,其中,第一轴具有第一端部区域、第二端部区域以及平行于旋转轴线从第一端部区域朝第二端部区域指向的第一方向矢量,并且第二轴具有第一端部区域、第二端部区域以及平行于旋转轴线从第一端部区域朝第二端部区域指向的第二方向矢量,其特征在于,第一轴构成为空心轴,并且第二轴同轴布置在第一轴中,使得第一方向矢量和第二方向矢量取向相同;以及,第一轴的第一端部区域具有第一测量标准件,第二轴的第一端部区域具有第二测量标准件,其中,第一测量标准件由第一传感器扫描,第二测量标准件由第二传感器扫描。
7.因此,本发明的基本思想是将一个轴插入构成为空心轴的另一个轴中,并且在两个轴的同一端部处以在空间上彼此靠近的方式布置测量标准件,这些测量标准件可由两个也在空间上彼此靠近的方式布置的传感器扫描。代替两个局部分离的旋转角度测量系统,可扫描两个以在空间上彼此靠近的方式布置的测量标准件,由此可确定两个轴中每一个的旋转角度位置。同时,这种布置还能够以简单的方式确定扭矩,该扭矩从第二轴例如从动轴的预期旋转角度位置和第二轴例如从动轴的实际旋转角度位置之间的旋转角度偏移产生,
例如在与第一轴连接的电机的预定转速下,或者通过固定第一轴并在负载下测量第二轴处产生的旋转角度。
8.根据本发明的一个有利设计方案,两个传感器布置在两个轴的第一端部区域的前方,这实现了一种紧凑的结构。
9.特别优选地,两个传感器布置在单个印刷电路板上,由此可减少所需部件的数量。
10.本发明的一个特别有利的改进方案规定的是,传感器构成为光学扫描元件,并且测量标准件构成为反射测量标准件。这种角度测量系统特别稳固并且实现了待检测旋转角度的高分辨率。
11.优选地,两个测量标准件以绕转方式构成,以便可以以简单的方式检测旋转角度。
12.特别优选地,第一测量标准件布置在盘环形第一元件上,所述盘环形第一元件布置在第一轴的第一端部区域处,并且第二测量标准件布置在盘环形第二元件上,所述盘环形第二元件布置在第二轴的第一端部区域处。这实现了一种紧凑的结构。
13.有利地,两个测量标准件彼此同心布置,这可简化对所检测的旋转角度的评估。
14.根据本发明的一个特别优选的实施方式,两个测量标准件布置在同一平面中,这可进一步简化对所检测的旋转角度的评估。
15.优选地,第一轴是传动装置的驱动轴,并且第二轴是传动装置的从动轴。由于构成为空心轴的第一轴形成传动装置的驱动轴,因而可以实现将驱动器以节省空间的方式布置在第一轴上。尤其地,第一轴可以为此有利地与电动机的转子抗旋转地连接。
16.优选地,传动装置是张力轴传动装置,由此可以实现在小空间内的高的传动比增加或减少。
17.如上所述的根据本发明的装置特别优选地用于机器人中,因为在机器人的情况下特别需要精确地控制它们的运动。因此,根据本发明的机器人包括根据本发明的装置。
附图说明
18.下面参照附图详细说明本发明的实施例。在附图中:
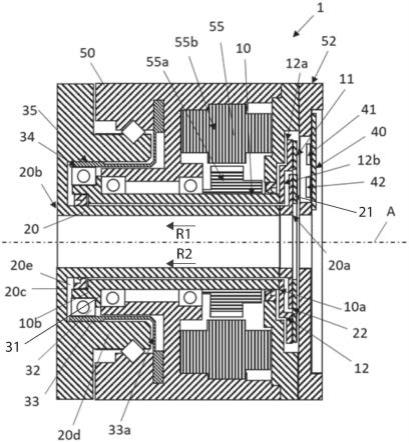
19.图1示出根据本发明用于确定第一轴和第二轴之间的扭矩和/或旋转角度的装置的实施例的纵截面;和
20.图2示出根据图1装置的部分透明平面图。
具体实施方式
21.图1和2示出用于确定第一轴10和第二轴20之间的扭矩和/或旋转角度的装置1的两个视图,该第一轴10和该第二轴20通过传动装置30相对于彼此绕旋转轴线a可旋转地连结。第一轴10具有第一端部区域10a、第二端部区域10b以及第一方向矢量r1,该第一方向矢量r1平行于旋转轴线a延伸并从第一端部区域10a指向第二端部区域10b。第二轴20具有第一端部区域20a、第二端部区域20b以及第二方向矢量r2,该第二方向矢量r2平行于旋转轴线a延伸并从第一端部区域20a指向第二端部区域20b。第一轴10构成为空心轴,第二轴20同轴布置在第一轴10中。该布置如此进行,使得第一方向矢量r1和第二方向矢量r2取向相同,或者换句话说,第一轴的第一端部区域10a和第二轴的第一端部区域20a指向同一侧。在这里,第二轴20的第一端部区域20a可位于第一轴10的第一端部区域10a内,尤其是与该第一
端部区域10a齐平,或略微突出超过该第一端部区域10a。
22.第一轴10的第一端部区域10a具有第一测量标准件11,而第二轴20的第一端部区域20a具有第二测量标准件21。测量标准件11、21可周向地构成。为此,测量标准件11、21可例如布置在轴10、20的外表面上。在所示的示例性实施例中,在第一轴10的第一端部区域10a处布置有盘环形的第一元件12,第一测量标准件11尤其周向地布置在该盘环形的第一元件12处或其上,而在第二轴20的第一端部区域20a处布置有盘环形的第二元件22,第二测量标准件21尤其周向地布置在该盘环形的第二元件22处或其上。测量标准件11、21尤其彼此同心地布置。盘环形的元件12、22各自具有一平面,该平面尤其垂直于旋转轴线a布置,其中,特别地,两个盘环形元件12、22和/或两个测量标准件11、21布置在同一平面中。为此,盘环形的第一元件21可以为阶梯式设计,使得盘环形第一元件12的外部区域12a布置在盘环形第二元件22的径向外部并与其布置在同一平面中,而盘环形第一元件12的内部区域12b布置在盘环形第二元件22的轴向后方。
23.测量标准件11、21允许通过一次绕转进行至少一次相对角度确定。优选地,测量标准件11、21是绝对测量标准件,其允许通过大量绕转进行角度确定。
24.第一测量标准件11由第一传感器41扫描,而第二测量标准件21由第二传感器42扫描。扫描可尤其以光学方式进行。为此,测量标准件11、21构成为反射式,而传感器41、42构成为光学扫描元件。
25.传感器41、42例如布置在两个轴10、20的第一端部区域10a、20a的前侧,从而测量标准件11、21基本上平行于旋转轴线a进行扫描。替代地,扫描也可在轴10、20的径向方向上进行。
26.传感器41、42特别优选地布置在单个印刷电路板40上。由传感器41、42检测到的扫描信号转发到评估单元,以确定第一轴10和第二轴20的旋转角度位置,并且在必要时还如下所述用于确定作用在轴10、20之间的扭矩。旋转角度位置可彼此独立地确定,即,第一轴10的旋转角度位置可通过借助第一传感器41扫描第一测量标准件11来确定,并且第二轴20的旋转角度位置可通过借助第二传感器42扫描第二测量标准件21来确定。在传动装置30的弹性已知的情况下,即已知在电机50以预定转速操作中无负载时,两个轴10、20之间存在何种角度差的情况下,根据操作中有负载时两个轴10、20之间的角度差可确定扭矩。
27.装置1可具有壳体50,该壳体50例如由盖52封闭。在这里,印刷电路板40可布置在盖52中,由此可容易地接近传感器系统。
28.第一轴10可以是传动装置30的驱动轴,而第二轴20可以是传动装置30的从动轴。第一轴10尤其是电机50的电机轴,该电机50优选地构成为电动机,尤其是伺服电机。电机50具有转子55a和定子55b,转子55a与第一轴10抗旋转地连结。
29.传动装置30将第一轴10的第二端部区域20a与第二轴20的第二端部区域20b连结。传动装置可以例如构成为张力轴传动装置。为此,可在第一轴10的第二端部区域10b处布置有径向突出部31,该径向突出部31具有垂直于旋转轴线a的椭圆形截面,在该径向突出部31的外圆周上布置有滚珠轴承32,该滚珠轴承32例如构成为滚柱轴承。在滚柱轴承32的外圆周上布置有柔性薄壁套筒33,该柔性薄壁套筒33通过绕转式轴环33a以固定支承的方式布置在壳体50中。套筒33的外侧具有外齿部34。在第二轴的第二端部区域20b处布置有径向突出部20c,该径向突出部20c在其面向第一端部区域20a方向的表面处具有绕转式突出部
20d,从而形成绕转式槽20e,该绕转式槽20e在第一端部区域20a的方向上打开。在槽20e中布置有内齿部35,套筒33的外齿部34接合在该内齿部35中。在这里,外齿部34和内齿部35之间的齿数存在差异,例如相差一个或两个齿。当第一轴10绕旋转轴线a旋转时,椭圆形突出部31使套筒33变形,并且由于齿差而实现了第二轴20相对于第一轴10的旋转。在这里,在齿数大的情况下,可实现高的传动比增加或减少。
30.装置1尤其用在机器人中,例如用在机器人的移动关节中。
31.装置1能够以简单的方式确定第一轴10和第二轴20的旋转角度位置,因为轴10、20的旋转角度位置、尤其是电机50的旋转角度位置和从动轴20的旋转角度位置以及因此传动装置30的输出可分别使用传感器41、42彼此独立地确定。装置1例如能够以下述方式,但也尤其在没有附加机械部件的情况下,进一步确定作用在两个轴10、20之间的扭矩。如果第一轴10被固定在其位置处并且待确定的扭矩作用在第二轴20上,则在第二轴20和第一轴10之间出现角度差,因为传动装置30具有弹性并且在施加扭矩时类似于扭力杆起作用。在传动装置的弹性已知的情况下,可根据角度差的大小确定扭矩。传动装置的已知弹性可例如这样来确定,即,在没有额外作用扭矩的情况下,在整个移动区域内确定第一轴10即电机轴或驱动轴和第二轴20即从动轴之间的角度差。
32.附图标记说明:
[0033]1ꢀꢀꢀꢀꢀꢀ
装置
[0034]
10
ꢀꢀꢀꢀꢀ
第一轴
[0035]
10a
ꢀꢀꢀꢀ
第一端部区域
[0036]
10b
ꢀꢀꢀꢀ
第二端部区域
[0037]
11
ꢀꢀꢀꢀꢀ
第一测量标准件
[0038]
12
ꢀꢀꢀꢀꢀ
盘环形第一元件
[0039]
12a
ꢀꢀꢀꢀ
外部区域
[0040]
12b
ꢀꢀꢀꢀ
内部区域
[0041]
20
ꢀꢀꢀꢀꢀ
第二轴
[0042]
20a
ꢀꢀꢀꢀ
第一端部区域
[0043]
20b
ꢀꢀꢀꢀ
第二端部区域
[0044]
20c
ꢀꢀꢀꢀ
径向突出部
[0045]
20d
ꢀꢀꢀꢀ
绕转式突出部
[0046]
20e
ꢀꢀꢀꢀ
槽
[0047]
21
ꢀꢀꢀꢀꢀ
第二测量标准件
[0048]
22
ꢀꢀꢀꢀꢀ
盘环形第二元件
[0049]
30
ꢀꢀꢀꢀꢀ
传动装置
[0050]
31
ꢀꢀꢀꢀꢀ
突出部
[0051]
32
ꢀꢀꢀꢀꢀ
滚珠轴承
[0052]
33
ꢀꢀꢀꢀꢀ
套筒
[0053]
33a
ꢀꢀꢀꢀ
轴环
[0054]
34
ꢀꢀꢀꢀꢀ
外齿部
[0055]
35
ꢀꢀꢀꢀꢀ
内齿部
[0056]
40
ꢀꢀꢀꢀꢀ
印刷电路板
[0057]
41
ꢀꢀꢀꢀꢀ
传感器
[0058]
42
ꢀꢀꢀꢀꢀ
传感器
[0059]
50
ꢀꢀꢀꢀꢀ
壳体
[0060]
52
ꢀꢀꢀꢀꢀ
盖
[0061]
55
ꢀꢀꢀꢀꢀ
电机
[0062]
55a
ꢀꢀꢀꢀ
转子
[0063]
55b
ꢀꢀꢀꢀ
定子
[0064]aꢀꢀꢀꢀꢀꢀ
旋转轴线
[0065]
r1
ꢀꢀꢀꢀꢀ
第一方向矢量
[0066]
r2
ꢀꢀꢀꢀꢀ
第二方向矢量
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
