1.本发明涉及航海仿真技术领域,尤其是涉及一种复杂环境下船舶仿真模拟及风险评估方法。
背景技术:
2.船舶模拟器通过虚拟现实技术来数字化模拟船舶的航行过程。尤其以其安全性高、经济性高、节省人力等优点在船舶通航安全研究中得到广泛应用,为港口、航道建设以及船舶航行提供论证和技术支撑。现有船舶仿真模拟技术对于模拟环境的设置存在局限性,主角体现在以下几个方面:风大多基于恒定速度和方向的海洋平面风,流场信息不能随时间变化而变化,波浪模型是基于理想波浪谱下的恒定传播方向的长峰规则波,不能随空间的变化而变化。而实际的海洋环境中,风、浪、流都具有相当的随机性,并且随时间和空间的变化而变化。现有仿真模拟设备对于复杂环境下长时间的运动仿真仍然存在较多局限性,不能较为准确的评估港口及航道工程的通航风险,因此急需提出复杂环境下的船舶仿真模拟及风险评估方法,为制定针对性更强的安全保障措施提供基础。
技术实现要素:
3.有鉴于此,本发明旨在提出一种复杂环境下船舶仿真模拟及风险评估方法,从而解决现有技术的不足,为解决船舶运动仿真环境的局限性、风险评估的不确定性,本发明设计了一种复杂环境下的仿真模拟及风险评估方法,能够实现航海模拟器中船舶在风浪流等复杂环境下的实时运动仿真,为制定针对性更强的安全保障措施提供基础。
4.为实现上述目的,本发明提出的技术方案是:一种复杂环境下船舶仿真模拟及风险评估方法,其方法包括:s1、通过气象站获取港口的历史或实时的风场数据,其风场数据包括风向、风速、位置,经预处理后得到风场数据集;其中,所述预处理包括无效数据剔除、缺失数据填补以及数据归一化;s2、利用数学模型,并基于所述风场数据集、地形数据等对目标港口的潮流、波浪进行计算,获取目标港口的潮流、波浪数据;s3、通过设置计算区域,给定具体的时间和空间分辨率,得到空对齐后的风、海流和波浪场数据;s4、通过sqlite构建本地数据库,按时间和空间分辨率构建数据库,所述数据库中主要存储数据为经纬度网格点、对应点的风向、风速、流向、流速、波向、波平均周期和有义波高数据;s5、建立风浪流耦合的船舶运动数学模型;s6、基于s4中的数据库进行风浪流耦合及力矩的计算;s7、将风浪流耦合的船舶运动数学模型集成至仿真模拟设备中,实现风浪流耦合下船舶的实时运动仿真;
s8、将所述风浪流耦合的船舶运动数学模型加入船舶数据库中,用于与实际航行轨迹数据进行环境重现和验证;s9、建立综合风险评价指标层次结构;s10、多次重复步骤s1-s8,并利用历史数据、实测资料确定获得环境风险指标及权重;s11、利用层次分析法和模糊综合评价法计算航道风险值。
5.进一步的,所述风浪流耦合的船舶运动数学模型的建立包括风浪流扰动的建模,所述风浪流扰动的建模包括海平面风的扰动建模、海流的扰动建模和波浪的扰动建模。
6.进一步的,所述海平面风的扰动建模中的风力根据具体的研究对象选择不同的载荷系数,其公式为:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)式中:l为船长,ρa为空气密度,c
x
,cy,cn,ck为纵向、横向、艏摇、横摇的风载荷系数,ua视为相对风速,a
l
和af分别为船舶侧面和正面受风投影面积。
7.进一步的,将海流对船体的漂移作用考虑为平移作用,计算时主要考虑流向流速对船舶速度矢量的改变,其公式为:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)式中:uc和vc表示原始海流的速率分量,u、v为纵向、横向速度,vc为流速矢量,为船艏向,为流向,ur和vr为矢量运算后的船舶分速度。
8.进一步的,所述波浪的扰动建模包括一阶波浪干扰建模和二阶波浪扰动建模;一阶波浪干扰建模计算公式为:式中:u为船速,ω
k
为波浪离散频率;χ
e 为波浪遭遇角;η
kn
为波高并利用波浪谱s
w
、波浪离散频率ω
k 和波浪扩散角θ
n 计算;ε
nk
为不规则波浪中的随机相位;φ
nk
为波浪载荷系数的相位值。
9.二阶波浪扰动建模即平均漂移作用的建模,利用不同频率和遭遇角下的二阶波浪载荷系数积分计算无量纲平均漂移力系数,根据船舶尺度计算实际所受到的漂移力和力
矩,其公式为:式中:l为船长,b为船宽,u为船速,ω
k
为波浪离散频率;χ
e 为波浪遭遇角;s
w
为波浪谱;ω
k
为波浪离散频率;θ
n
为波浪扩散角θ
n
;φ
nk
为波浪载荷系数的相位值,c为平均二阶波浪载荷系数;h
1/3
是有义波高;ρ为海水密度;g为重力加速度。
10.进一步的,通过专家咨询方法建立综合风险评价指标层次结构,根据评价的目的,主要综合考虑航道条件和船舶操纵条件两个指标。综合评价函数为:式中:g——设定船舶通过拟建航道时所承担的危险程度;q——为航道环境风险指标;e——为船舶操纵风险指标。
11.进一步的,通过历史数据、实测资料确定环境风险指标体系,具体包括气象条件、地理环境条件和水域设施状况,航道环境风险指标q定义为:式中:q
1-航道长度,评价指标为航道长度/航道宽度;q
2-航道宽度,评价指标为平均船宽/航道宽度;q
3-航道弯曲状况,评价指标为航道最大弯曲角度;q
4-能角度,评价指标为年均能角度不良标准天数,指标范围5-60天/年;q
5-风,年均6级以上风的标准天数,标准风的天数=6-7级平均风的天数 15
×
8级以上风均天数;q
6-流,航道与流的交叉角度;q7交通量,每天船舶通航艘次;q
8-vts管理,表示船舶交通服务管理水平的高低,利用专家打分;q
9-助航设施,主要考虑浮标数目(平均每10海里航道一侧的浮标数目)。
12.本发明的有益效果是:1、本发明提出按时间和空间分辨率构建环境数据库的方法,利用该数据库对时空变化的真实环境矢量场进行重现,解决航海模拟器中现有风流浪环境模拟不逼真的局限性问题。
13.2、本发明由于设置了较为逼真的环境数据库,船舶在仿真模拟过程中与实船航行具有较高的相似度,能定量评估不同工况下船舶航行风险,优化了航道风险评估体系,相比现有技术,风险评估更准确。
14.3、本发明提出了系统的通航环境数据模拟、数据库搭建、数据融合、风浪流耦合船舶运动模型,形成了较为完善的船舶通航安全仿真模拟及风险评估成套理论和技术。
附图说明
15.图1为本发明风浪流环境数据库内部结构;图2为本发明风浪流环境数据插值示意图;图3为本发明风浪流环境矢量数据析出图;图4为本发明风浪流数据实时仿真建模过程图;图5为本发明实验例中的2013年6月2日的复杂环境重现图;图6为本发明实验例中2013年6月3日的复杂环境重现图;图7为本发明实验例中2013年6月4日的复杂环境重现图;图8为本发明实验例中2013年6月5日的复杂环境重现图;图9为本发明复杂环境仿真模拟测试结果;图10为本发明船舶操纵评价指标体系的层次结构图。
16.图11为e风7级2000吨级货船进港试验图;
具体实施方式
17.为了更好的理解本发明,下面结合具体实施例和附图对本发明进行进一步的描述。
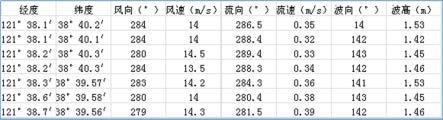
18.一种复杂环境下船舶仿真模拟及风险评估方法,其方法包括:s1、通过气象站获取港口的历史及实时的风场数据,其风场数据包括风向、风速、位置,经预处理后得到风场数据集;其中,所述预处理包括无效数据剔除、缺失数据填补以及数据归一化;s2、利用数学模型,并基于所述风场数据集、地形数据等对目标港口的潮流、波浪进行计算,获取目标港口的潮流、波浪数据;s3、通过设置计算区域,给定具体的时间和空间分辨率,得到空对齐后的风、海流和波浪场数据;s4、通过sqlite构建本地数据库,按时间和空间分辨率构建数据库,所述数据库中主要存储数据为经纬度网格点、对应点的风向、风速、流向、流速、波向、波平均周期和有义波高数据;具体的,数据集库内部结构如图1所示。
19.s5、建立风浪流耦合的船舶运动数学模型;s6、基于s4中的数据库进行风浪流耦合及力矩的计算;s7、将风浪流耦合的船舶运动数学模型集成至仿真模拟设备中,实现风浪流耦合下船舶的实时运动仿真;具体的,所述风浪流耦合的船舶运动数学模型的建立包括风浪流扰动的建模,所述风浪流扰动的建模包括海平面风的扰动建模、海流的扰动建模和波浪的扰动建模。
20.进一步的,所述海平面风的扰动建模中的风力根据具体的研究对象选择不同的载荷系数,其公式为:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)其中,ρa为空气密度,c
x
,cy,cn,ck为纵向、横向、艏摇、横摇的风载荷系数,ua视为视风风速,a
l
和af分别为船舶侧面和正面受风投影面积。
21.进一步的,将海流对船体的漂移作用考虑为平移作用,计算时主要考虑流向流速对船舶速度矢量的改变,其公式为:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)其中:uc和vc表示原始海流的速率分量,u、v为纵向、横向速度,vc为流速矢量,为船艏向,为流向,ur和vr为矢量运算后的船舶分速度。
22.进一步的,所述波浪的扰动建模包括一阶波浪干扰建模和二阶波浪扰动建模;一阶波浪干扰建模计算公式为:式中:l为船长,b为船宽,u为船速,ω
k
为波浪离散频率;χ
e 为波浪遭遇角;η
kn 为波高并利用波浪谱s
w
、波浪离散频率ω
k 和波浪扩散角θ
n 计算;ε
nk
为不规则波浪中的随机相位;φ
nk
为波浪载荷系数的相位值。
23.二阶波浪扰动建模即平均漂移作用的建模,利用不同频率和遭遇角下的二阶波浪载荷系数积分计算无量纲平均漂移力系数,根据船舶尺度计算实际所受到的漂移力和力矩,其公式为:式中:l为船长,b为船宽,u为船速,ω
k
为波浪离散频率;χ
e 为波浪遭遇角;s
w
为波浪谱;ω
k
为波浪离散频率;θ
n
为波浪扩散角θ
n
;φ
nk
为波浪载荷系数的相位值,c为平均二阶波浪载荷系数;h
1/3
是有义波高;ρ为海水密度;g为重力加速度。
24.具体的,如图2-图3所示,通过设置经度和纬度为组合键,可以根据船舶位置进行快速二维线性插值求取具体的风、流和波浪矢量,同时根据船舶仿真所处的时间,对前后两个数据库进行插值,最终获取到所需的矢量信息。
助航设施,主要考虑浮标数目(平均每10海里航道一侧的浮标数目)。
29.s11、利用层次分析法和模糊综合评价法计算航道风险值。
30.通过船舶参数确定船舶操纵风险体系,包括船舶操纵性能、航行条件和操船信息,如图10所示:图10中:u
1-剩余角速度,转头角为15度的旋回实验中的剩余角速度;u
2-维持舵效的最低船速,一般选取3-6kn之间;u
3-停船冲程,船舶从全速倒车停止0kn的冲程;u
4-初始转首时间,船舶z型试验中的初始转首时间;u
5-相对回转直径;u
6-航道曲率半径和船长之比;u
7-船宽和航道宽度之比;u
8-船舶吃水和水深之比;u
9-偏航角,航行中的最大偏航角;u
10-偏航量,用偏航量/船宽衡量;u
11-舵角,航行中的最大舵角;u
12-富裕宽度,用船宽/富裕宽度衡量。
31.具体的,利用船舶实时运动仿真获取的航行及操纵数据确定船舶操纵条件指标及权重,试验轨迹见图11所示,各指标对船舶操纵风险的影响程度见表1。
32.表1船舶操纵风险影响程度权重表利用层次分析法和模糊综合评价法计算航道风险值,以天津中心渔港航道为例,对不同情况下口门内外的航道风险值进行了定量计算,为制定针对性更强的安全保障措施提供了基础,如表2所示。
33.表2中心渔港各航段综合风险指标值以上对本发明的一个实施例进行了详细说明,但内容仅为本发明的较佳实施例,
不能被认为用于限定本发明的实施范围。凡依本发明申请范围所作的均等变化与改进等,均应仍归属于本发明的专利涵盖范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
