1.本发明涉及数据处理技术领域,尤其涉及一种跨场景鲁棒的室内摔倒无线检测方法、系统、终端及计算机可读存储介质。
背景技术:
2.室内摔倒检测对于独居老人、敬老院的老人、术后康复中的病人或残疾人等健康问题有着重要的作用,而现有的基于运动传感器的方法通常要求个人佩戴专门的设备来跟踪身体的运动,这样的方法不仅增加了设备部署成本,还带来了生活上的不便。依赖于相机或可见光传感器的方法只能在一定的光照条件下很好地工作,这些环境很容易受到低光照条件、烟雾或不透明障碍物的干扰。总的来说,上述技术在硬件安装和维护需求方面涉及到额外的开销。为了克服上述限制,近年来随着无线局域网技术的发展,wifi信号几乎完全覆盖室内区域,与上述方法相比,wifi具有低成本、保护隐私等优点。
3.已有的 wi-fi 室内摔倒检测主要依靠信号接收强度(received signal strength,rss)的方式,但 rss 属于 mac 层信号,存在不稳定、粗粒度、易受环境因素干扰等固有缺陷,对于人体动作无法进行高精度的识别。近年来,研究人员开始利用信道状态信息(channel state information,csi)来进行wifi感知研究,相较于 rss,csi具有更好的时频稳定性和更细粒度的信道感知信息,可以更灵敏地感知无线环境中的人体动作的变化。因此,基于csi 信号的摔倒监测技术在室内环境下具有更好的应用前景和研究价值。
4.目前基于csi的摔倒检测算法主要分为传统的机器学习算法和新兴的深度学习算法,但是上述的两种方法都有其优缺点。前者主要依靠提取csi矩阵的统计特征,如均值、标准差、方差、波峰波谷数量等统计信息,并使用机器学习模型(如逻辑回归、支持向量机等)学习不同动作情况下csi测量矩阵之间的特征差异,从而对识别摔倒动作。其缺点在于大多数机器学习算法的性能依赖于所提取的特征的准确度,特征处理过程很耗时而且需要专业知识,大多数应用的特征都需要专家确定,然后编码为一种数据类型,并且该类算法无法处理高维度的数据,需要先对csi矩阵进行特征计算和降维处理。
5.而深度学习无需人工设定特征,只需要将csi矩阵的幅值信息和相位信息经过一定的预处理(分割、降噪等),然后输入到神经网络模型(如深度神经网络、卷积神经网络、循环神经网络等)进行监督训练,自动训练模型计算权重偏量并提取数据特征来进行分类。
6.虽然深度学习削减了对每一个问题设计特征提取器的工作,但该类方法也有其缺点,它依赖于大量训练数据的迭代,需要进行大量的矩阵运算,对硬件资源需求较大。通常情况下,训练一个深度学习算法需要很长的时间。
7.另外,模型的鲁棒性不管在机器学习算法中还是深度学习算法中都是需要面对的问题。即实验环境的变化(例如场景的更换、实验人员的替换或者是收发设备位置的更换)会严重影响到模型的表现。导致这个问题的原因一是csi矩阵对于环境的变化很敏感,二是单一场景训练模型都会产生过拟合问题,即模型只学会了处理单个场景的数据。
8.可知现有的基于csi的摔倒检测方法有以下的技术缺陷:要进行深度学习训练需
要大量样本,而大量摔倒的数据样本采集成本很高,且在跨场景下模型的鲁棒性较差。
9.因此,现有技术还有待于改进和发展。
技术实现要素:
10.本发明的主要目的在于提供一种跨场景鲁棒的室内摔倒无线检测方法、系统、终端及计算机可读存储介质,旨在解决现有技术中基于csi的摔倒检测方法要进行深度学习训练需要大量样本,而大量摔倒的数据样本采集成本很高,且在跨场景下模型的鲁棒性较差的问题。
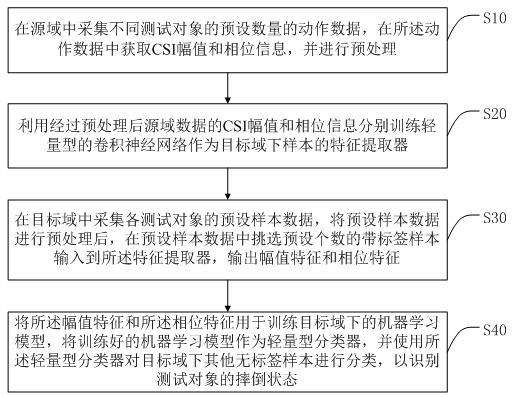
11.为实现上述目的,本发明提供一种跨场景鲁棒的室内摔倒无线检测方法,所述跨场景鲁棒的室内摔倒无线检测方法包括如下步骤:在源域中采集不同测试对象的预设数量的动作数据,在所述动作数据中获取csi幅值和相位信息,并进行预处理;利用经过预处理后源域数据的csi幅值和相位信息分别训练轻量型的卷积神经网络作为目标域下样本的特征提取器;在目标域中采集各测试对象的预设样本数据,将预设样本数据进行预处理后,在预设样本数据中挑选预设个数的带标签样本输入到所述特征提取器,输出幅值特征和相位特征;将所述幅值特征和所述相位特征用于训练目标域下的机器学习模型,将训练好的机器学习模型作为轻量型分类器,并使用所述轻量型分类器对目标域下其他无标签样本进行分类,以识别测试对象的摔倒状态。
12.可选地,所述的跨场景鲁棒的室内摔倒无线检测方法,其中,所述源域和所述目标域为不同的检测场景,两个检测场景在环境上具有明显的差异。
13.可选地,所述的跨场景鲁棒的室内摔倒无线检测方法,其中,将csi幅值和相位信息进行预处理,包括:对所述csi幅值和所述相位信息进行去噪处理,再分别进行窗口分段处理。
14.可选地,所述的跨场景鲁棒的室内摔倒无线检测方法,其中,所述利用经过预处理后源域数据的csi幅值和相位信息分别训练轻量型的卷积神经网络作为目标域下样本的特征提取器,具体包括:获取经过预处理的csi幅值和相位信息;将经过预处理后源域数据的csi幅值和相位信息进行多次迭代训练轻量型的卷积神经网络;当轻量型的卷积神经网络训练达到要求时保存网络模型并冻结网络参数,并将训练完成的轻量型的卷积神经网络作为目标域下样本的特征提取器。
15.可选地,所述的跨场景鲁棒的室内摔倒无线检测方法,其中,所述轻量型的卷积神经网络包括4个卷积块和1个全连接层,其中,每个卷积块包含16个卷积核、1个批量标准化层、1个relu激活函数和1个池化层,其中,每个卷积核尺寸为2
×
2。
16.可选地,所述的跨场景鲁棒的室内摔倒无线检测方法,其中,在源域中采集不同测试对象的预设数量的动作数据和在目标域中采集各测试对象的预设样本数据均包括多个测试对象的4类动作类型,分别为步行摔倒、坐着、步行和坐下。
17.可选地,所述的跨场景鲁棒的室内摔倒无线检测方法,其中,所述机器学习模型为逻辑回归模型或支持向量机模型或神经网络模型。
18.此外,为实现上述目的,本发明还提供一种跨场景鲁棒的室内摔倒无线检测系统,其中,所述跨场景鲁棒的室内摔倒无线检测系统包括:源域数据采集与处理模块,用于在源域中采集不同测试对象的预设数量的动作数据,在所述动作数据中获取csi幅值和相位信息,并进行预处理;训练特征提取器模块,用于利用经过预处理后源域数据的csi幅值和相位信息分别训练轻量型的卷积神经网络作为目标域下样本的特征提取器;特征提取模块,用于在目标域中采集各测试对象的预设样本数据,将预设样本数据进行预处理后,在预设样本数据中挑选预设个数的带标签样本输入到所述特征提取器,输出幅值特征和相位特征;摔倒状态检测模块,用于将所述幅值特征和所述相位特征用于训练目标域下的机器学习模型,将训练好的机器学习模型作为轻量型分类器,并使用所述轻量型分类器对目标域下其他无标签样本进行分类,以识别测试对象的摔倒状态。
19.此外,为实现上述目的,本发明还提供一种终端,其中,所述终端包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的跨场景鲁棒的室内摔倒无线检测程序,所述跨场景鲁棒的室内摔倒无线检测程序被所述处理器执行时实现如上所述的跨场景鲁棒的室内摔倒无线检测方法的步骤。
20.此外,为实现上述目的,本发明还提供一种计算机可读存储介质,其中,所述计算机可读存储介质存储有跨场景鲁棒的室内摔倒无线检测程序,所述跨场景鲁棒的室内摔倒无线检测程序被处理器执行时实现如上所述的跨场景鲁棒的室内摔倒无线检测方法的步骤。
21.本发明中,在源域中采集不同测试对象的预设数量的动作数据,在所述动作数据中获取csi幅值和相位信息,并进行预处理;利用经过预处理后源域数据的csi幅值和相位信息分别训练轻量型的卷积神经网络作为目标域下样本的特征提取器;在目标域中采集各测试对象的预设样本数据,将预设样本数据进行预处理后,在预设样本数据中挑选预设个数的带标签样本输入到所述特征提取器,输出幅值特征和相位特征;将所述幅值特征和所述相位特征用于训练目标域下的机器学习模型,将训练好的机器学习模型作为轻量型分类器,并使用所述轻量型分类器对目标域下其他无标签样本进行分类,以识别测试对象的摔倒状态。本发明实现了对目标域人员摔倒状态的准确检测。
附图说明
22.图1是本发明跨场景鲁棒的室内摔倒无线检测方法的较佳实施例的流程图;图2是本发明跨场景鲁棒的室内摔倒无线检测方法的较佳实施例的总体数据处理流程示意图;图3是本发明跨场景鲁棒的室内摔倒无线检测方法的较佳实施例中拥挤室内场景的示意图;图4是本发明跨场景鲁棒的室内摔倒无线检测方法的较佳实施例中拥挤室内场景设备位置更换的示意图;
图5是本发明跨场景鲁棒的室内摔倒无线检测方法的较佳实施例中空旷室内场景的示意图;图6是本发明跨场景鲁棒的室内摔倒无线检测方法的较佳实施例中空旷室内场景非视距的情况下的示意图;图7是本发明跨场景鲁棒的室内摔倒无线检测方法的较佳实施例中幅度样本预处理过程的示意图;图8是本发明跨场景鲁棒的室内摔倒无线检测方法的较佳实施例中相位样本预处理过程的示意图;图9是本发明跨场景鲁棒的室内摔倒无线检测方法的较佳实施例中cnn模型结构的示意图;图10是本发明跨场景鲁棒的室内摔倒无线检测方法的较佳实施例中训练样本的数据维度在cnn中的变化示意图;图11是本发明跨场景鲁棒的室内摔倒无线检测方法的较佳实施例中在目标域中随机选出5个样本作为小样本学习的训练样本进行分类后的结果示意图;图12是本发明跨场景鲁棒的室内摔倒无线检测方法的较佳实施例中在目标域中随机选出15个样本作为小样本学习的训练样本进行分类后的结果示意图;图13是本发明跨场景鲁棒的室内摔倒无线检测系统的较佳实施例的原理示意图;图14为本发明终端的较佳实施例的运行环境示意图。
具体实施方式
23.为使本发明的目的、技术方案及优点更加清楚、明确,以下参照附图并举实施例对本发明进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
24.本发明较佳实施例所述的跨场景鲁棒的室内摔倒无线检测方法,如图1和图2所示,所述跨场景鲁棒的室内摔倒无线检测方法包括以下步骤:步骤s10、在源域中采集不同测试对象的预设数量的动作数据,在所述动作数据中获取csi幅值和相位信息,并进行预处理。
25.其中,源域表示原场景,对应的目标域表示新环境,所述源域和所述目标域为不同的检测场景,两个检测场景在环境上具有明显的差异,先在原场景(源域)中采集不同测试对象的一定数量的动作数据(样本),在所述样本中获取csi幅值和相位信息,并进行预处理,预处理为:对所述csi幅值和所述相位信息进行去噪处理,再分别进行窗口分段处理。
26.步骤s20、利用经过预处理后源域数据的csi幅值和相位信息分别训练轻量型的卷积神经网络作为目标域下样本的特征提取器。
27.具体地,获取经过预处理源域数据的csi幅值和相位信息;将经过预处理后源域数据的csi幅值和相位信息进行多次迭代训练轻量型的卷积神经网络;当轻量型的卷积神经网络训练达到要求时(例如源域数据经多次迭代达到较高准确度)保存网络模型并冻结网络参数,并将训练完成的轻量型的卷积神经网络作为目标域下样本的特征提取器。
28.步骤s30、在目标域中采集各测试对象的预设样本数据,将预设样本数据进行预处理后,在预设样本数据中挑选预设个数的带标签样本输入到所述特征提取器,输出幅值特
征和相位特征。
29.其中,目标域表示新环境,在新环境下中,采集各测试对象的一定样本数据,将预设样本数据进行预处理后,在预设样本数据中挑选预设个数的带标签样本,输入到所述特征提取器,输出幅值特征和相位特征组成特征图(即幅值-相位特征图)。
30.步骤s40、将所述幅值特征和所述相位特征用于训练目标域下的机器学习模型,将训练好的机器学习模型作为轻量型分类器,并使用所述轻量型分类器对目标域下其他无标签样本进行分类,以识别测试对象的摔倒状态。
31.其中,利用特征图(幅值-相位特征图)来训练一个轻量型分类器(即小型分类器),利用特征图(幅值-相位特征图)训练目标域下的机器学习模型从而得到轻量型分类器,再利用轻量型分类器对目标域下其他无标签样本进行分类,以识别测试对象的摔倒状态。
32.模型鲁棒性挑战普遍存在于在相同场景中对不同实验人员的行为检测、不同场景中对相同实验人员的行为检测、不同场景对不同实验人员的行为检测中。即在某环境下经过充分训练的模型,一旦检测环境发生了变化,模型的表现会急剧下降。将不同场景、不同实验人员采集到的数据分别划分为源域和目标域数据,跨场景或者跨实验人员的摔倒检测问题的难点是在新的环境下往往只有非常有限的标注样本,难以充分训练深度学习中的小型分类器模型。针对这一问题,本发明采用了小样本学习(few shot learning,fsl),使学习系统能够从少量样本中学习,目标是只依靠目标域上少量的训练样本(每个类别1/5/15个样本),就能实现对目标域准确的摔倒检测。
33.本发明设计的无线环境下基于小样本学习的高鲁棒性人体摔倒监测方法,利用小样本学习只需要采集少量目标域数据就可以达到高精度的分类效果,可以缓解摔倒数据样本采集困难的问题,并且可以在不同的环境背景下实现鲁棒的摔倒检测,此方法首先对csi的幅度和相位进行了预处理(去噪、归一化、窗口截取片段),再利用卷积神经网络cnn来提取csi矩阵中的幅度和相位信息特征:利用原场景(源域)中采集的样本训练csi矩阵幅度和相位的特征提取器,然后采集新的实验人员在该场景(目标域)下的样本数据,分别将少量(1/5/15个)带标签样本输入训练好的特征提取器以获得相应数据特征,用于训练小型分类器模型(轻量型分类器)以实现对目标域无标签样本进行分类。
34.在实验人员变换的情况下,只需要采集新的实验人员5个样本,就可以快速训练出效果很好的小型分类器模型,实验样本的动作类型有:
①
缓慢步行后摔倒;
②
坐着;
③
步行;
④
坐下,将这四种动作进行四分类时,准确率可达到96%以上。本发明解决了深度学习模型跨域情况下模型鲁棒性较差和实际应用部署中面临的摔倒数据采集困难等问题。此外,对数据进行预处理的方法能够有效地对原始数据进行去噪,并且截取出动作相关的部分,这为后续模型的训练奠定了良好基础。
35.检测场景如图3、图4、图5和图6所示,图3表示源域(los),代表场景a,图4表示设备位置更换(nlos),代表场景b,图5表示房间更换(los),代表场景c,图6表示房间和设备位置更换(nlos),代表场景d,这里选择的都是比较典型的场景,包括较为拥挤的房间(场景a和场景b)和较为空旷的房间(场景c和场景d),场景a为常见的室内场景,收集实验人员(即测试对象)在视距环境下做出不同动作的数据作为源域数据;通过改变收发设备摆放的位置以及更换实验人员来收集目标域数据,目标域一共有3个目标场景,场景b与场景a是在同一个办公室,不过改变了收发设备的位置,场景c和场景d都是在另一个较为空旷的实验室,其
中场景c代表视距(los)场景,即无线信号无遮挡地在发信端与接收端之间直线传播;场景d代表nlos场景,也就是在有障碍物的情况下,无线信号只能通过反射,散射和衍射方式到达接收端。本发明的目标是基于fsl跨任务学习的思想,使源域数据训练出来的模型可以应用在场景b、场景c、场景d等目标域场景中,并且在更换实验人员的情况下也可以取得较高的准确率,将采集每个实验场景下的不同实验人员摔倒与非摔倒的共四个动作的csi数据,在样本采集过程中,实验人员将在标注的地方完成相应的动作(动作没有规定一致)。
36.如图2所示,采集到的csi数据首先进行预处理,然后根据房间不同、实验人员的不同和收发设备摆放位置不同将采集的数据分别划分为源域数据和目标域数据,其中场景a中除了实验人员甲的数据都用来作为源域数据,实验人员甲在场景a的数据以及其他所有人员在场景b、场景c、场景d采集到的数据都作为目标域数据;源域数据将用于训练一个特征提取器,训练完之后,保存其模型参数;然后将目标域数据输入到特征提取器中得到特征图,利用特征图来训练一个小型分类器。其中,训练分类器仅需要使用少量样本(每种动作的类别选取1/5/15个样本)。
37.在实际中,wifi技术基于ieee 802.11a/g/n协议,支持多输入多输出(multi-input multi-output,mimo)和正交频分复用(orthogonal frequency-division multiplexing,ofdm)技术,使用了多根天线和多个测量子载波。通过修改网卡驱动,可以采集到无线网卡上的csi信息。在图3-图6的实验场景中,分别采集了房间内多个实验人员做多个动作的csi,采集到的原始csi流为4维的复数矩阵,,其中,c表示维度,t是时间维度,是接收天线数量,nt是发射天线数量, 则是子载波数量。对于采集到的csi数据,首先根据幅值和相位信息的特性,分别对两者进行了不同的预处理(这里的不同是处理细节的不同)。
38.如图7所示,对于幅值信息,需要进行一定的标准化使其适应模型的输入,采用了基于层的标准化(layer normalization),首先对每一对天线对的数据进行了归一化处理,此时矩阵大小为 ,其中,是截取窗口的大小,然后在矩阵维度上合并接收天线数量、发射天线数量,再与子载波数合并,此时矩阵大小为,其中,是收发天线数合并后的数量(即收发天线对数量);去噪过程包括如下步骤:对矩阵做保留贡献度为0.9的主成分分析(pca),接着对每对收发天线对中的114个子载波上的样本进行滤波以消除峰值和离群值,再通过均方差的选取保留方差最大的15个子载波,最后按照固定的时间窗口对含有动作(步行摔倒、坐着、步行、坐下)的区间进行截取,得到最终分段数据的矩阵大小为 。
39.如图8所示,原始csi相位信息中包含了载波时间偏移(carrier frequency offset,cfo)和采样时间偏移(sampling time offset,sto)这两种主要的噪声,本发明通过计算两两收发天线对之间的相位差,有效地消除了噪声分量;为了进行校准和补偿由于硬件上的缺陷以及在传输过程中因环境噪声的影响引起的误差,假设这些相位偏差都是线性的,引入一种线性变换的方法对归一化后的相位进行处理:;
其中,;;;其中,是经过线性变化校准后的相位,k是子载波数,是解卷绕之后的相位,是原始相位,取值1-m,和表示系数,是定时误差偏移(或者说时延),是设备引起的随机相位偏移,是测量过程中的随机噪声,是第m个子载波的相位,是子载波索引,是第m个子载波,n为fft点数,n = 128。
40.线性去噪后每条子载波上能比较真实地反映出真实相位的变化情况。后续对相位的处理类似于对幅度的处理,保留方差最大的15个子载波,按照固定的时间窗口进行截取,得到最终分段数据的矩阵大小为 ,其中是截取窗口大小。
41.经过预处理的幅值信息和相位差信息都是3维矩阵,大小为3
×
600
×
15,(其中,数字3表示选取后的天线对数量,600为窗口截取后的时间维度,15为选取的子载波数量)。采集到的数据经过上述预处理后,将数据格式重构为3
×
25
×
24,以便后续的训练,接着对每个样本打标签,将样本保存为 ,其中,为幅值矩阵,为相位差矩阵,为样本,为标签。本次实验除了采集人员甲的四种动作的数据作为目标域数据集之外,还有五个实验人员参与实验,主要作为源域数据集。针对不同的场景,不同实验人员,不同动作采集的数据,将会划分不同的训练集和测试集。在场景a详细样本分类可见下表1:表1:在场景a详细样本分类(1)更换实验人员:将除实验人员甲以外的5个试验人员在场景a的los数据作为源域数据,实验人员甲在场景a的los数据作为目标域数据,四种动作分别打标签为0-3。
42.(2)更换实验人员和收发设备位置:将除实验人员甲以外的5个试验人员在场景a的los数据作为源域数据,实验人员甲在场景b的nlos数据作为目标域数据,四种动作分别打标签为0-3。
43.(3)更换实验人员和更换房间:将除实验人员甲以外的5个试验人员在场景a的los数据作为源域数据,实验人员甲在场景c的los数据作为目标域数据,四种动作分别打标签
为0-3。
44.(4)更换实验人员、收发设备位置和更换房间:将除实验人员甲以外的5个试验人员在场景a的los数据作为源域数据,实验人员甲在场景d的nlos数据作为目标域数据,四种动作分别打标签为0-3。
45.利用元学习的知识迁移概念,本发明的第一阶段是分类训练阶段,先利用源域的样本训练出一个先验模型,第二阶段是元学习阶段,在得到了第一阶段分类训练的特征编码器(先验模型和特征编码器是同一个,只不过在不同的阶段叫法不同)情况下,从目标域中采样n-way k-shot的任务进行有效的特征提取,降低了对目标域训练数据量的需求,在目标域中利用小样本便实现了优秀的分类性能。
46.假设令源域数据集为 ,其中, 是训练集,则是测试集,其中是源域数据的总数,是源域数据中用于训练的数据个数,是源域数据中用于测试的数据个数,是源域中的训练集的数据,是对应的标签,是源域中的测试集的数据,是对应的标签。目标域数据集为 ,其中 是训练集,是测试集,是目标域数据中用于训练的数据个数,是目标域数据中用于测试的数据个数,是目标域中的训练集的数据,是对应的标签,是目标域中的测试集的数据,是对应的标签。本发明的方法主要是在源域训练一个特征提取器,特征提取器的目标是用于提取目标域数据的特征,生成低维度的特征图,然后利用目标域的特征图训练一个分类器。
47.本发明在源域只训练特征提取器,一旦训练完毕,该特征提取器的参数将不再变化。给定充足的源域样本,本发明选择使用卷积神经网络(convolution neural network, cnn)来提取csi的特征。
48.本发明的cnn特征提取器模型结构如图9所示:该模型具有4个卷积块和1个全连接层,其中,每个卷积块包含16个卷积核(2
×
2 conv2d),每个卷积核尺寸为2
×
2,一个批量标准化层(batchnorm2d)和一个relu激活函数,以及一个池化层(maxpool2d),总体参数量为3584,各层的可训练的参数量如下表(网络模型各层参数量)所示:
表2:网络模型各层参数量在源域的目的是训练特征提取器 ,而特征提取器的目标则是寻找优化参数,即:;其中,为交叉熵损失函数,表示训练集。对于csi矩阵的幅值和相位信
息,本发明提出特征提取器由两个子模型组,用于提取幅值信息,则用于提取相位差信息,两个子模型的架构都如图9所示,它们的训练是独立的。
49.如果场景发生了变换(例如wifi收发设备位置更换、实验人员更换、检测的场景改变等),即使上述的模型在前一个场景识别性能优异(比如98%以上),如果将其直接拿来作为新场景(即目标域)的分类器,由于新场景下数据特性不同,其分类性能可能急剧下降(比如下降到60%)。
50.针对上述问题,本发明利用元学习的知识迁移思想进一步提高模型的鲁棒性。将预先训练好的cnn模型作为新场景或新实验人员数据的特征提取器:在新场景中,只需要将目标域中采集的样本输入到特征提取器cnn中,即可获得相对应的特征图(feature map)。
51.样本在cnn中的变化如图10所示,其中,csi矩阵包含了幅值和相位信息,其数组维度为3
×
25
×
24,经过卷积神经网络的处理之后,特征得到提炼,数组大小发生变化;根据所选取的神经网络层位置的不同,所构建特征图的大小也不同。本发明经过充分实验,发现取倒数第三个卷积块的输出得到的特征图效果最佳,其大小为16
×7×
6,再将其展开成1
×
672(672=16
×7×
6)大小的二维特征矩阵。
52.本发明在目标域使用传统的机器学习算法,使用轻量化的分类器将所得的联合特征进行训练和预测,该轻量级网络由θ={w,b}参数化,其中w是权值,b则是偏置项,r是正则项,该轻量级网络是在目标域的小样本训练数据集上训练的,目标为:;本发明分别测试了逻辑回归模型(logistic regression,lr)、支持向量机(support vector machine,svm)和神经网络(neural networks,nn)作为轻量化分类器的分类性能。实验结果表明,使用特征提取器提取的特征训练出来的lr和svm的表现都很好,只需要新场景下的5个样本就可以达到相当好的性能,测试准确率最高能达到96%以上,如果将样本增加到15个,性能会进一步得到提升,测试准确率最高能达到98%以上,因此本发明的机器学习模型优选为逻辑回归模型(lr)或支持向量机模型(svm)。相比之下,使用nn作为分类器的性能略差一些。
53.本发明采集了多个实验人员在4个场景中包括
①
步行后摔倒
②
坐着
③
步行
④
坐下4类动作的样本,其中,4个场景指的是分别在两个不同的房间(见图3-图6)采集了los和nlos完成动作的数据。
54.在实验中,将四种动作分别看作了二分类(仅检测是否摔倒)、三分类(步行摔倒、坐着和步行)和四分类;同时对比了利用lr模型、svm模型和nn模型作为分类器的分类性能。
55.在场景a更换实验人员的数据作为测试集的实验结果如图11(5 shot:在目标域中随机选出5个样本进行训练)和图12(15 shot:在目标域中随机选出15个样本进行训练)所示,图11和图12为lr、svm和nn分类器在3种分类情况下的结果。
56.从图11和图12中可以看到,三种分类情况下,本发明方法中的lr和svm模型都取得了较高的准确率,特别是在增加训练样本数为15个时,平均准确率接近97%。
57.在更换实验人员情况下15 shot四分类的混淆矩阵如下表3(lr分类器的分类结
果)和表4(svm分类器的分类结果)所示:表3:lr分类器的分类结果表4:svm分类器的分类结果从混淆矩阵可以看出,在大多数情况下准确率是比较高的,即使有错误的情况出现,也是个别样本出现了较大的偏差,但这个数量是属于可接受范围内的。
58.本发明在源域训练特征提取器并将其用于提取目标域数据的特征;使用多层的cnn作为csi矩阵的特征提取器,对csi的幅值和相位分别训练相应的子模型;目标域的少量训练样本输入特征提取器,再将获得的特征图用于训练具有针对性的小型机器学习模型svm。
59.有益效果:(1)本发明使用无线局域网wifi信号的信道状态信息csi进行室内摔倒检测,相比于摄像头和雷达,基于csi的摔倒检测方法具有更好的隐私保护性和普适性。
60.(2)对幅度和相位的预处理方法,对幅度信息先进行归一化,再通过主成分分析(pca)和hampel滤波,然后通过方差大小来选取表现最明显的子载波,再通过时间窗口截取需要的样本;对于相位信息,通过两两收发天线对之间的相位差来消除噪声,再进行归一化,并且引入了一种线性变换的方法对相位进行校准来补偿原始相位的误差。
61.(3)本发明提出使用深度学习模型cnn作为csi信号的特征提取器,相比于单独的基于幅值的方法,包含更丰富的信息,提高了后续模型的检测准确度。
62.(4)本发明提出使用小样本学习的方法提高检测系统鲁棒性,只需要新场景下的5个样本,即可以训练出针对新场景的性能优异的轻量级分类器,解决了机器学习模型、深度学习模型迁移到新场景下性能下降的鲁棒性问题,同时,小样本学习还一定程度上避免了
模型在新场景应用过程中的数据采集难、训练难等问题。
63.进一步地,本发明还可以更改在源域训练的cnn特征提取器的结构,如更改卷积层的数量、将部分或全部全卷积层更换成循环神经网络(rnn)层等;更改目标域的针对性的轻量级模型结构,如将lr模型换成余弦相似度模型等;更改小样本学习算法,放弃在目标域训练针对性模型,转而使用目标域的少量样本来微调源域的cnn模型的参数,使源域训练的模型能适应目标域的数据;在小样本学习之前加入一个生成对抗网络(generative adversarial network, gan) 模块,先将目标域的样本放入gan模型中进行数据增强,之后再对增强后的数据进行小样本学习。
64.进一步地,如图13所示,基于上述跨场景鲁棒的室内摔倒无线检测方法,本发明还相应提供了一种跨场景鲁棒的室内摔倒无线检测系统,其中,所述跨场景鲁棒的室内摔倒无线检测系统包括:源域数据采集与处理模块51,用于在源域中采集不同测试对象的预设数量的动作数据,在所述动作数据中获取csi幅值和相位信息,并进行预处理;训练特征提取器模块52,用于利用经过预处理后源域数据的csi幅值和相位信息分别训练轻量型的卷积神经网络作为目标域下样本的特征提取器;特征提取模块53,用于在目标域中采集各测试对象的预设样本数据,将预设样本数据进行预处理后,在预设样本数据中挑选预设个数的带标签样本输入到所述特征提取器,输出幅值特征和相位特征;摔倒状态检测模块54,用于将所述幅值特征和所述相位特征用于训练目标域下的机器学习模型,将训练好的机器学习模型作为轻量型分类器,并使用所述轻量型分类器对目标域下其他无标签样本进行分类,以识别测试对象的摔倒状态。
65.进一步地,如图14所示,基于上述跨场景鲁棒的室内摔倒无线检测方法和系统,本发明还相应提供了一种终端,所述终端包括处理器10、存储器20及显示器30。图14仅示出了终端的部分组件,但是应理解的是,并不要求实施所有示出的组件,可以替代的实施更多或者更少的组件。
66.所述存储器20在一些实施例中可以是所述终端的内部存储单元,例如终端的硬盘或内存。所述存储器20在另一些实施例中也可以是所述终端的外部存储设备,例如所述终端上配备的插接式硬盘,智能存储卡(smart media card, smc),安全数字(secure digital, sd)卡,闪存卡(flash card)等。进一步地,所述存储器20还可以既包括所述终端的内部存储单元也包括外部存储设备。所述存储器20用于存储安装于所述终端的应用软件及各类数据,例如所述安装终端的程序代码等。所述存储器20还可以用于暂时地存储已经输出或者将要输出的数据。在一实施例中,存储器20上存储有跨场景鲁棒的室内摔倒无线检测程序40,该跨场景鲁棒的室内摔倒无线检测程序40可被处理器10所执行,从而实现本技术中跨场景鲁棒的室内摔倒无线检测方法。
67.所述处理器10在一些实施例中可以是一中央处理器(central processing unit, cpu),微处理器或其他数据处理芯片,用于运行所述存储器20中存储的程序代码或处理数据,例如执行所述跨场景鲁棒的室内摔倒无线检测方法等。
68.所述显示器30在一些实施例中可以是led显示器、液晶显示器、触控式液晶显示器以及oled(organic light-emitting diode,有机发光二极管)触摸器等。所述显示器30用
于显示在所述终端的信息以及用于显示可视化的用户界面。所述终端的部件10-30通过系统总线相互通信。
69.在一实施例中,当处理器10执行所述存储器20中跨场景鲁棒的室内摔倒无线检测程序40时实现如上所述跨场景鲁棒的室内摔倒无线检测方法的步骤。
70.本发明还提供一种计算机可读存储介质,其中,所述计算机可读存储介质存储有跨场景鲁棒的室内摔倒无线检测程序,所述跨场景鲁棒的室内摔倒无线检测程序被处理器执行时实现如上所述的跨场景鲁棒的室内摔倒无线检测方法的步骤。
71.综上所述,本发明提供一种跨场景鲁棒的室内摔倒无线检测方法及相关设备,所述方法包括:在源域中采集不同测试对象的预设数量的动作数据,获取csi幅值和相位信息;利用预处理后源域数据的csi幅值和相位信息分别训练轻量型的卷积神经网络作为目标域下样本的特征提取器;在目标域中采集各测试对象的预设样本数据,预处理后在预设样本数据中挑选预设个数的带标签样本输入到所述特征提取器,输出幅值特征和相位特征;将所述幅值特征和所述相位特征用于训练目标域下的机器学习模型,将训练好的机器学习模型作为轻量型分类器,并使用所述轻量型分类器对目标域下其他无标签样本进行分类,以识别测试对象的摔倒状态。本发明实现了对目标域人员摔倒状态的准确检测,能够从少量样本中学习,只依靠目标域上少量的训练样本,就能实现对目标域准确的摔倒检测。
72.需要说明的是,在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者终端不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者终端所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括该要素的过程、方法、物品或者终端中还存在另外的相同要素。
73.当然,本领域普通技术人员可以理解实现上述实施例方法中的全部或部分流程,是可以通过计算机程序来指令相关硬件(如处理器,控制器等)来完成,所述的程序可存储于一计算机可读取的计算机可读存储介质中,所述程序在执行时可包括如上述各方法实施例的流程。其中所述的计算机可读存储介质可为存储器、磁碟、光盘等。
74.应当理解的是,本发明的应用不限于上述的举例,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,所有这些改进和变换都应属于本发明所附权利要求的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。