技术特征:
1.一种沥青路面施工过程平整度实时检测方法,用于在沥青路面被车辆碾压过程中实时对路面平整度进行检测,其特征在于,包括以下步骤:步骤s1:处理模块通过响应性平整度测量方法来获取路面的平整度数据,根据高精度加速度计获得车辆的动态垂直加速度并且根据动态垂直加速度计算获得加速度均方根;步骤s2:处理模块建立空间坐标与实际平面距离坐标的转换模型,以在平面坐标进行实际距离地显示;步骤s3:处理模块对获得的国际平整度指数iri进行可视化显示,从而对路面的碾压进行调整。2.根据权利要求1所述的一种沥青路面施工过程平整度实时检测方法,其特征在于,步骤s1具体实施为以下步骤:步骤s1.1:通过如下公式对获得的一组加速度值a={a1,a2,
…
,a
n
}进行异常值检验并且剔除处理,公式为:其中,为加速度平均值,std为加速度标准差,n为每秒内的加速度值数量,即加速度计输出频率,如果a
i
为异常值,则使用替换来剔除异常值;步骤s1.2:通过如下公式对异常值检验并且剔除处理后获得的一组加速度值a
′
={a
′1,a
′2,
…
,a
′
n
}进行滤波处理,以获得加速度的滑动滤波平滑数据,公式为:其中,a
′
i
为滤波后i个加速度值,n为加速度值的个数,m为滤波窗口内的加速度值个数;步骤s1.3:通过如下公式对滤波处理后的加速度值进行计算,以获得加速度均方根,公式为:其中,a
′
i
为滤波后第i个加速度值,为滤波后加速度平均值,n为加速度值的个数;步骤s1.4:通过如下公式将获得的加速度均方根进行计算,以获得国际平整度指数iri,公式为:iri=a b*rmsva;其中,a和b为标定后得到的转换系数,均由车辆携带的检测设备标定过程获得。3.根据权利要求2所述的一种沥青路面施工过程平整度实时检测方法,其特征在于,步骤s2具体实施为以下步骤:步骤s2.0:经纬高坐标转换为空间坐标;步骤s2.1:以gps测量获得的纬度作为自变量x并且经度作为应变量y,从而计算车辆行
驶方向的旋转矩阵;步骤s2.2:计算x坐标的真实距离;步骤s2.3:计算y坐标的真实距离。4.根据权利要求3所述的一种沥青路面施工过程平整度实时检测方法,其特征在于,步骤s2.0具体实施为以下步骤:步骤s2.0.1:gps测量的经纬高数据是在大地坐标系下的坐标值,首先将数据转换到到空间直角坐标系中,即:其中,l为经度,b为纬度,h为大地高,a为地球椭球的长半轴,b为地球椭球的短半轴。5.根据权利要求4所述的一种沥青路面施工过程平整度实时检测方法,其特征在于,步骤s2.1具体实施为以下步骤:步骤s2.1.1:获取车辆起点经纬度数据p0(x0,y0),沿车辆行驶方向每间隔1米分别获取4组经纬度数据,并全部减去初始位置p0,使得轨迹从坐标原点开始,4组数据记为p1(x1,y1),p2(x2,y2),p3(x3,y3),p4(x4,y4);步骤s2.1.2:构建行驶轨迹拟合直线y=kx,其中平面坐标系行驶方向为自下而上,因此根据轨迹计算旋转矩阵并将经纬度数据进行修正转化为平面坐标。6.根据权利要求5所述的一种沥青路面施工过程平整度实时检测方法,其特征在于,步骤s2.1.2中的轨迹计算旋转矩阵具体实施为以下步骤:步骤s2.1.2.1:当行驶轨迹在第一和第四象限时,旋转矩阵为:其中,步骤s2.1.2.2:当行驶轨迹在第二和第三象限时,旋转矩阵为:其中步骤s2.1.2.3:根据所求得的旋转矩阵修正平面坐标,以获得修正后的坐标(x
′
,y
′
);7.根据权利要求6所述的一种沥青路面施工过程平整度实时检测方法,其特征在于,步
骤s2.2具体实施为以下步骤:步骤s2.2.1:以起点p0(x0,y0)为原点,沿行驶方向的垂直方向每间隔1米同样获取4组经纬度数据,并全部减去初始位置p0,并根据步骤s2.1中的方法对4组数据进行坐标旋转变化,最终结果记为p
′1(x
′1,y
′1),p
′2(x
′2,y
′2),p
′3(x
′3,y
′3),p
′4(x
′4,y
′4),其中x
′1,x
′2,x
′3,x
′4为转换后的坐标,而实际对应距离为1,2,3,4米,因此构建真实距离坐标模型如下:其中,x
true
为真实距离坐标,x为经旋转后的坐标,根据最小二乘法原理,求解参数:其中,为旋转后坐标均值,为真实值均值。8.根据权利要求7所述的一种沥青路面施工过程平整度实时检测方法,其特征在于,步骤s2.3具体实施为以下步骤:步骤s2.3.1:根据步骤s2.2中计算得到x值后,根据上一个点的位置和实际距离计算该点的位置y
true
值,过程如下:i.根据两点获得的经度和纬度通过以下公式计算两个位置的距离d:其中,l为经度,b为纬度,h为大地高,r为地球椭球的平均半径;ii.根据距离d和x值计算y轴间距d
y
值:iii.根据行驶轨迹计算:其中,y
′
i
为旋转后的坐标y值,和为坐标原点,因此值为0。9.根据权利要求8所述的一种沥青路面施工过程平整度实时检测方法,其特征在于,步骤s3具体实施为以下步骤:步骤s3.1:对国际平整度指数iri进行实时动态阈值计算,计算过程如下:对某一时刻的iri数据集,记r={r1,r2,
…
,r
n
},将n个数据按数值从小到大进行排列,若某个数值存在多个数据仅取一个,记r={r1,r2,
…
,r
n
},其中r1<r2<
…
<r
n
,n≤n,对r中的每一个数据计算其在r中出现的累计频率,记p={p1,p2,
…
,p
n
},则根据p将阈值划分为:
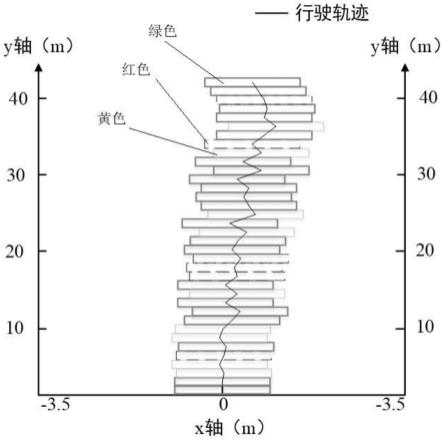
步骤s3.2:对国际平整度指数iri进行可视化显示,采用不同颜色矩形框可视化方法,矩形宽度为车辆的压轮的实际宽度,长度则为纵坐标y值的间隔,矩形填充颜色根据步骤s3.1中计算的阈值分成三类,如下:10.根据权利要求9所述的一种沥青路面施工过程平整度实时检测方法,其特征在于,步骤s1.1之前还包括步骤s1.0:将gps和加速度计进行时间同步。
技术总结
本发明公开了一种青路面施工过程平整度实时检测方法,用于在沥青路面被车辆碾压过程中实时对路面平整度进行检测,包括步骤S1:处理模块通过响应性平整度测量方法来获取路面的平整度数据,根据高精度加速度计获得车辆的动态垂直加速度并且根据动态垂直加速度计算获得加速度均方根。本发明公开的一种青路面施工过程平整度实时检测方法,能在沥青混合料热态情况下,即在沥青路面碾压过程中,实时对路面平整度等指标进行检测,并进行量化和可视化,进而为压路机驾驶员和现场技术人员提供参考,第一时间发现异常状况,使其有针对性地对平整度等未达标路段进行及时纠偏。平整度等未达标路段进行及时纠偏。平整度等未达标路段进行及时纠偏。
技术研发人员:刘燕燕 裘秋波 董海东 纪文强 王良彬 熊分清 王建民 张华东
受保护的技术使用者:浙江顺畅高等级公路养护有限公司
技术研发日:2022.01.17
技术公布日:2022/7/21
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。