1.本发明属于智能立体仓库分拣调度领域,特别是涉及基于行为依赖图的多车型协同分拣调度方法。
背景技术:
2.本发明涉及的系统为基于滚动时间窗口的多车型协同分拣调度系统,其中智能立体仓库分为三层,每层放置多个高层货架存放中小件零部件,同时存在多辆分拣车和搬运车。由于仓库后端需要成套零部件,因此涉及分拣车和搬运车两种车型协同完成整个订单任务,其中搬运车负责将所需零部件存放的料盘取下来,分拣车负责分拣整个订单所需的所有零部件,通过车上搭载的机械臂将搬运车取下的料盘中所需零部件放置在分拣车料框中。
3.围绕上述场景需求,智能立体仓库分拣调度系统包含三个模块,即高效任务分配、实时路径规划、动态多车调度。高效任务分配模块是整个环节的基础,直接决定智能仓库分拣调度系统的分拣效率。首先当多个订单并发时,需根据订单的优先级顺序分配合适的分拣车执行订单任务,其次由于每个订单包含多个零部件,而搬运车散落在仓库不同位置,需根据搬运车实时位置以及零部件位置综合考量选择合适的搬运车执行搬运任务;实时路径规划模块决定订单最终完成时间,其中分拣车需根据订单中零部件位置确定拣选顺序,同时确定分拣车运行的最优路径,搬运车需根据当前位置与零部件位置,确定搬运车与零部件之间的最优路径;动态多车调度模块是智能立体仓库分拣调度系统的核心环节,在同一个环境中并发运行的多台搬运车分拣车容易出现冲突与死锁问题,因此确定调度算法避免出现以上问题。
4.拣货作业是自动化仓库的一项重要内容,优化拣货作业能够明显提高仓库运作效率。目前,更多学者研究智能立体仓库分拣调度系统的单一模块,例如:马清悦等人以拣货时间最小化为目标设计启发式算法进行拣选路径的设计;有学者结合hopfiled网络模型,采用改进的遗传算法研究自动化立体仓库中固定货架拣选作业路径优化问题,以上研究只单独考虑多车路径规划模块。有学者在各种不同的agv(automated guided vehicle)调度规则下建立了agv运行时间的模型,并用传统的启发式算法解决问题;还有学者提出了应用排队和仿真模型来区分关键性能参数并比较不同调度规则方法,以上研究只单独考虑多车调度模块。
5.系统中的搬运车和分拣车在任务执行过程中扮演着不同的角色,重点在于协调多方面的任务要求,在规定的范围内既合理又不过多地增加协调过程,任务分配的好坏直接影响整个系统的效率,并且直接关系到系统中各个机器人是否最大限度发挥自身能力,避免占有更多资源。
技术实现要素:
6.针对以上技术问题,本发明提供分拣调度效率高的基于行为依赖图的多车型协同
分拣调度方法。
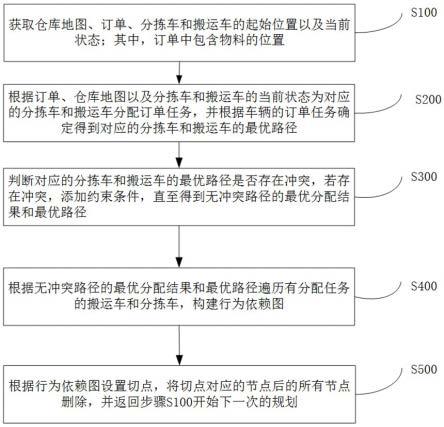
7.本发明解决其技术问题采用的技术方案是:基于行为依赖图的多车型协同分拣调度方法,方法包括以下步骤:步骤s100:获取仓库地图、订单、分拣车和搬运车的起始位置以及当前状态;其中,订单中包含物料的位置;步骤s200:根据订单、仓库地图以及分拣车和搬运车的当前状态为对应的分拣车和搬运车分配订单任务,并根据车辆的订单任务确定得到对应的分拣车和搬运车的最优路径;步骤s300:判断对应的分拣车和搬运车的最优路径是否存在冲突,若存在冲突,添加约束条件,直至得到无冲突路径的最优分配结果和最优路径;步骤s400:根据无冲突路径的最优分配结果和最优路径遍历有分配任务的搬运车和分拣车,构建行为依赖图;步骤s500:根据行为依赖图设置切点,将切点对应的节点后的所有节点删除,并返回步骤s100开始下一次的规划。
8.优选地,步骤s200包括:步骤s210:根据分拣车的当前状态以及订单,为当前处于空闲状态的分拣车分配订单任务;步骤s220:根据订单中零件位置构建处于空间状态的分拣车的分配矩阵,基于仓库图和分配矩阵获得成本矩阵,通过成本矩阵获取分拣车的零部件分拣顺序;步骤s230:根据零部件分拣顺序计算处于空闲状态的搬运车到达分拣点的最短路径距离,确认由最短路径距离的搬运车执行任务到分拣点;步骤s240:通过a*算法为所获取的分配结果计算对应的分拣车和搬运车的最优路径。
9.优选地,步骤s300包括:当计算的路径存在冲突时,添加约束条件,并返回步骤s220得出下一次的分配和最优路径,若没有路径冲突存在,则当前最优路径为最终规划结果;若路径冲突仍然存在,则根据下一次的分配和最优路径判断是否存在冲突,直至得到无冲突路径的最优分配结果和最优路径。
10.优选地,路径存在冲突包括顶点冲突和边冲突。
11.优选地,步骤s400包括:步骤s410:遍历有分配任务的搬运车和分拣车,添加顶点与节点、节点和节点之间的边,并将添加的边设置为第一类型的边;步骤s420:遍历对应的分拣车和搬运车的节点,如果有其它节点的源点位置等于当前节点的终点位置,并且节点时间小于当前节点时间,那么添加边并将其设置为第二类型的边,完成行为依赖图构建。
12.优选地,步骤s500包括:步骤s510:根据行为依赖图,将已完成路径点的后一个步长位置节点设置为预设集节点;步骤s520:将第一类型和第二类型的边设置为反向边,从预设集节点反向搜索与
该节点相关联的顶点加入到可达集中;步骤s530:遍历每个搬运车和分拣车,计算可达集中节点时刻的最大值,并将该节点设置为切点;步骤s540:将切点对应的节点后的所有节点删除,并返回步骤s100进行下一次的分配和规划。
13.上述基于行为依赖图的多车型协同分拣调度方法,采用基于冲突搜索的最优分配算法对分拣车和搬运车进行任务分配和路径规划,同时根据行为依赖图算法保证系统持续执行并提高其鲁棒性,从而确保所有规划的节点全部执行,有效提高了分拣调度效率。
附图说明
14.图1为本发明一实施例中基于行为依赖图的多车型协同分拣调度方法的流程图;图2为本发明一实施例中的仓库示意图;图3为本发明一实施例中的行为依赖图。
具体实施方式
15.为了使本技术领域的人员更好地理解本发明的技术方案,下面结合附图对本发明作进一步的详细说明。
16.机器人进行分拣需要两台车协同完成,例如,除了搭载机械臂和料盘的分拣车之外,还需要一台用来取料盘的搬运车,智能立体仓库多车协同分拣调度系统的整个分拣过程包括以下步骤:分拣车从其起始点移动到某个进行分拣的位置l;搬运车从起始点移动到零部件所在料盘前(该位置记为p),将料盘从立库上取下,然后移动到进行分拣的位置l(若p=l,则无需进行移动);在l处,分拣车上的机械臂将搬运车上的零部件抓取放入自身搭载的料盘中;搬运车将所搭载的料盘,搬运到p处(若p=l,则无需进行移动),并将之放回立库。
17.在一个实施例中,如图1所示,基于行为依赖图的多车型协同分拣调度方法,方法包括以下步骤:步骤s100:获取仓库地图、订单、分拣车和搬运车的起始位置以及当前状态;其中,订单中包含物料的位置。
18.步骤s200:根据订单、仓库地图以及分拣车和搬运车的当前状态为对应的分拣车和搬运车分配订单任务,并根据车辆的订单任务确定得到对应的分拣车和搬运车的最优路径。
19.在一个实施例中,步骤s200包括:步骤s210:根据分拣车的当前状态以及订单,为当前处于空闲状态的分拣车分配订单任务;步骤s220:根据订单中零件位置构建处于空间状态的分拣车的分配矩阵,基于仓库图和分配矩阵获得成本矩阵,通过成本矩阵获取分拣车的零部件分拣顺序;步骤s230:根据零部件分拣顺序计算处于空闲状态的搬运车到达分拣点的最短路径距离,确认由最短路径距离的搬运车执行任务到分拣点;步骤s240:通过a*算法为所获取的分配结果计算对应的分拣车和搬运车的最优路径。
20.具体地,如图2所示为构建的地图,其中r1代表分拣车,r2和r3代表搬运车,g1、g2分别为仓库(可支持分拣车搬运车同时作业,其余顶点只允许一辆车停留)。
21.当系统产生一个订单,分别需要从仓库g1和g2取零件,r1分拣车当前为空闲状态,因此将该订单分配给r1分拣车;构建分拣车分配矩阵,计算成本矩阵,因此可以获取分拣车分拣顺序为先到b再到a;根据成本矩阵确认搬运车分配,搬运车r2距离b点cost = 3,r3距离b点cost = 5,因此搬运车r2要到b点执行搬运任务;通过a*算法计算分拣车r1和搬运车r2的路径(不考虑其它机器人车的情况下),分拣车r1:k-h-e-b,搬运车r2:c-d-e-b。
22.步骤s300:判断对应的分拣车和搬运车的最优路径是否存在冲突,若存在冲突,添加约束条件,直至得到无冲突路径的最优分配结果和最优路径。
23.在一个实施例中,步骤s300包括:当计算的路径存在冲突时,添加约束条件,并返回步骤s220得出下一次的分配和最优路径,若没有路径冲突存在,则当前最优路径为最终规划结果;若路径冲突仍然存在,则根据下一次的分配和最优路径判断是否存在冲突,直至得到无冲突路径的最优分配结果和最优路径。
24.进一步地,路径存在冲突包括顶点冲突和边冲突。
25.具体地,无向图g =(v, e),其中表示顶点位置(机器人可到达的位置),示连接顶点与顶点之间的边,总共存在机器人n分别处于不同顶点位置,,m个不同的目标点,矩阵a(n
×
m)表示机器人是否可以分配到某个目标点,如表示机器人i可以到达目标点。
26.在每个时间步长,机器人可以移动到相邻顶点或者在当前顶点停留,表示机器人i在时间t所处的顶点。表示机器人i的路径,需满足以下条件:(1)机器人i的起点为起始顶点,终点为目标点,即;(2)每次行动要么在边上移动,要么在顶点等待,即或。机器人i和i’有两种引发冲突的情况:顶点冲突,在同一时刻t两个机器人在同一顶点位置;边冲突,在一条边两个机器人相向而行。当存在冲突时,需要添加约束条件避免冲突出现,如表示在t时刻禁止机器人占用顶点v。
27.比如,在确定分拣车和搬运车的路径后,分拣车r1:k-h-e-b,搬运车r2:c-d-e-b,上面计算出的路径在t = 2时刻发生顶点冲突,因此添加约束条件(r1,e,2)或(r2,e,2)。与此同时,进行下一次的分配,以防止该冲突无法解决,下一次分配即将搬运车r3分配到b点执行任务;当添加约束条件(r1,e,2)时,分拣车r1在t =1时刻在点h原地不动,而搬运车r2
在t = 2时刻到达e点,即分拣车r1:k-h-h-e-b,搬运车r2:c-d-e-b,此时冲突已经解决,在g1目标点执行拣货任务。
28.分拣车需要到g2执行拣货任务,因此需要分配搬运车达到g2协同分拣车一起执行任务。分别计算搬运车达到g2目标点的成本,搬运车r2:cost = 4,搬运车r3:cost = 3根据成本最低原则选取搬运车r3执行任务;通过a*算法计算分拣车r1和搬运车r3的路径,r1:b-e-d-c-a,r3:i-f-c-a,此时无冲突产生,在g2目标点执行拣货任务,订单所有任务完成。
29.步骤s400:根据无冲突路径的最优分配结果和最优路径遍历有分配任务的搬运车和分拣车,构建行为依赖图。
30.在一个实施例中,步骤s400包括:步骤s410:遍历有分配任务的搬运车和分拣车,添加顶点与节点、节点和节点之间的边,并将添加的边设置为第一类型的边;步骤s420:遍历对应的分拣车和搬运车的节点,如果有其它节点的源点位置等于当前节点的终点位置,并且节点时间小于当前节点时间,那么添加边并将其设置为第二类型的边,完成行为依赖图构建。
31.具体地,如图3所示,根据cbs_ta算法所得到的规划结果,通过遍历所有车辆,为其添加各个节点及节点与节点之间的连边,设置为第一类型的边(对应图中实线);遍历各个节点,如果有其它节点的源点位置等于当前节点的终点位置,并且节点时间小于当前节点时间时,构建第二类型的边(对应图中虚线)。
32.步骤s500:根据行为依赖图设置切点,将切点对应的节点后的所有节点删除,并返回步骤s100开始下一次的规划。
33.在一个实施例中,步骤s500包括:步骤s510:根据行为依赖图,将已完成路径点的后一个步长位置节点设置为预设集节点;步骤s520:将第一类型和第二类型的边设置为反向边,从预设集节点反向搜索与该节点相关联的顶点加入到可达集中;步骤s530:遍历每个搬运车和分拣车,计算可达集中节点时刻的最大值,并将该节点设置为切点;步骤s540:将切点对应的节点后的所有节点删除,并返回步骤s100进行下一次的分配和规划。
34.具体地,根据行为依赖图,设置在1个时间步长后的顶点为预设集节点(图中d1、d2、d3);分别将第一类型和第二类型的边设置为反向边,并从预设集节点反向搜索与该节点相关联的顶点,并加入到可达集中;遍历所有机器人,计算可达集中节点时刻最大值并将其设置为切点(图中c1、c2、c3);在切点对应的节点后的所有节点删除并开始下一次的规划,重新执行cbs-ta算法进行下一次的分配和规划。
35.上述基于行为依赖图多车型协同分拣调度方法,采用基于冲突搜索的最优分配算法(cbs_ta)对分拣车和搬运车进行任务分配和路径规划,同时根据行为依赖图算法保证系统持续执行并提高其鲁棒性,从而确保所有规划的节点全部执行。
36.以上对本发明所提供的基于行为依赖图多车型协同分拣调度方法进行了详细介绍。本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只
是用于帮助理解本发明的核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以对本发明进行若干改进和修饰,这些改进和修饰也落入本发明权利要求的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。