1.本发明属于大气光学领域,具体涉及一种动态大气湍流相位屏的生成方法。
背景技术:
2.大气湍流是一种不规则的大气随机运动。由于大气中横向风速的存在,会影响到大气湍流随时间的变化。通常用相位屏方式仿真大气湍流时,往往假定大气湍流的统计特征是静态的,不考虑相位屏之间的时间相关性,这不利于仿真大气湍流的非平稳性特征。
3.为了仿真大气湍流在横向风速影响下,随时间变化的动态性,并且实现长时间的模拟,研究者分别提出了基于相位协方差的插值方法产生无限长湍流相位屏[ass
é
mat,optics express,2006,14(3):988-999],基于相位协方差的多点插值预测方法[向劲松,强激光与粒子束,2012,24(5):1071-1075],基于统计插值的相位屏生成方法[wu,2009,optics express,2009,17(17):14649-14664],基于旋转相位屏的动态大气湍流数值模拟[李盾,红外与激光工程,2017,46(12):1211003],基于lc-slm的相位屏加载方式形成动态的湍流相位屏[丛明慧,光通信技术,2020,44(10):28-32]。
[0004]
不同于这些已报道的动态相位屏生成方法,本发明提出一种基于次谐波法和双向二分拉格朗日插值的动态相位屏生成方法,能够实现大气湍流所引起的光波相位的连续变化,从而模拟大气湍流随时间的演化过程。
技术实现要素:
[0005]
本发明的目的在于提出一种动态大气湍流相位屏的生成方法,该方法生成的动态大气湍流相位屏包含两个部分:空域不相关的粗粒度大气湍流相位屏以及时域相关的细粒度大气湍流相位屏,通过两种层级相位屏的融合,实现大气湍流所引起的光波相位的连续变化,模拟大气湍流随时间的演化过程。
[0006]
为了实现上述目的,本发明所采用的技术方案为:
[0007]
一种动态大气湍流相位屏的生成方法,包括以下步骤:
[0008]
步骤1,利用次谐波法生成空域不相关的若干大气湍流相位屏,分别记为φ1,φ2,
…
,φn;
[0009]
步骤2,在两个空域不相关的相邻大气湍流相位屏φi和φ
i 1
之间,利用双向二分拉格朗日插值生成时间相关的m层大气湍流相位屏φ
ij
,φ
ij 1
,
…
,φ
ij m
;
[0010]
步骤3,若步骤2中所述的m层时间相关的大气湍流相位屏已经完全生成,那么,计算出这m层大气湍流相位屏所产生的相位变化,并记录下来;
[0011]
步骤4,释放步骤2中已经生成的时间相关的m层大气湍流相位屏所占用的存储空间,用于存放下一个m层的时间相关大气湍流相位屏;
[0012]
步骤5,判断仿真是否结束,若未结束,重复步骤2~步骤4。
[0013]
与现有方法相比,本发明其显著优点在于:
[0014]
(1)本发明提出双向二分拉格朗日插值模拟时间相关的大气湍流相位屏生成,该
方法先插值生成中间层的大气湍流相位屏,然后分别从左右两个方面同时快速二分插值,插值速度快,能够实现时间相关大气湍流相位屏的快速模拟。
[0015]
(2)本发明提出对较早生成的时间相关大气湍流相位屏进行相位计算后,释放所占用空间,优化对内存资源的消耗,有利于实现长距离和超长距离的大气湍流相位屏仿真。
附图说明
[0016]
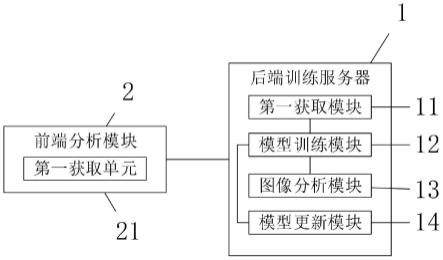
图1为本发明的动态大气湍流相位屏的生成方法步骤。
[0017]
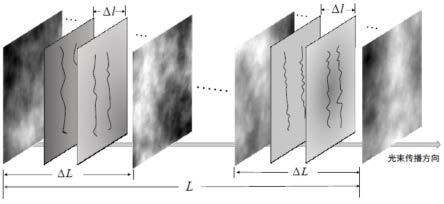
图2为时域相关多层大气湍流相位屏。
[0018]
图3为双向二分拉格朗日插值大气湍流相位屏示意(虚线框内插值相位屏)。
具体实施方式
[0019]
根据泰勒假设,在光波传输路径上依次生成多层大气湍流相位屏可以模拟大气湍流随时间的演化。因此随着时间的演化,相位屏的数量越来越多,所需的内存空间也越来越大,这对模拟的硬件配置提出了更高要求。并且,静态的大气湍流相位屏生成方法不考虑时域相关,生成的相位屏之间是时间无关的。
[0020]
为了同时考虑大气湍流相位屏之间的时域相关性和生成多层相位屏对内存的占用,本发明提出双向二分拉格朗日插值实现互不相关的两个大气湍流相位屏之间大气湍流连续变化,通过双向二分拉格朗日插值,得到一系列连续变化的相位屏,作为时间相关的大气相位屏。随着时间推移,大气湍流相位屏不断增多,会消耗大量的存储空间,因此在不影响光波模拟的前提下,本发明将较早生成的时间相关大气湍流相位屏进行相位计算后,释放所占用空间,从而解决了模拟内存空间不足的问题。
[0021]
请参阅图1所示,本发明提出的动态大气湍流相位屏生成方法包含以下步骤:
[0022]
步骤1,利用次谐波法生成空域不相关的若干大气湍流相位屏,分别记为φ1,φ2,
…
,φn。
[0023]
步骤2,在两个空域不相关的相邻大气湍流相位屏φi和φ
i 1
之间,利用双向二分拉格朗日插值生成时间相关的m层大气湍流相位屏φ
ij
,φ
ij 1
,
…
,φ
ij m
。
[0024]
步骤3,若步骤2中所述的m层时间相关的大气湍流相位屏已经完全生成,那么,计算出这m层大气湍流相位屏所产生的相位变化,并记录下来。
[0025]
步骤4,释放步骤2中已经生成的时间相关的m层大气湍流相位屏所占用的存储空间,用于存放下一个m层的时间相关大气湍流相位屏。
[0026]
步骤5,判断仿真是否结束,若未结束,重复步骤2~步骤4。
[0027]
以下针对本发明提出的动态大气湍流相位屏生成方法作具体说明:
[0028]
图2为时域相关多层大气湍流相位屏,相位屏垂直于光束传播方向,l为相位屏的总长度,相距为δl的相位屏为粗粒度的空域不相关大气湍流相位屏,若考虑两个相位屏之间的空域不相关,那么δl应该大于等于湍流外尺度。此时空域不相关的大气湍流相位屏个数为l/δl。相距为δl的为细粒度的时域相关大气湍流相位屏,由插值算法产生。
[0029]
本发明提出的动态大气湍流相位屏生成方法,实现过程包括如下步骤:
[0030]
步骤1,利用次谐波法生成空域不相关的若干大气湍流相位屏,分别记为φ1,φ2,
…
,φn,这些空域不相关的大气湍流相位屏,在仿真过程中一直保持在存储空间中。
[0031]
次谐波法是对逆傅里叶变换方法的改进,原始的逆傅里叶变换法不能较好地仿真大气湍流低频特性,利用次谐波法能够弥补大气湍流仿真中的低频不足。
[0032]
该方法首先要得到高频相位屏的表达式,表示为:
[0033][0034]
公式(1)中,m,n和m’,n’是整数,代表相位屏上的格点下标;n
x
和ny分别为x方向和y方向的采样总点数;h(m’,n’)为零均值、单位方差的复高斯白噪声;f(m’,n’)为相位屏谱,采用改进的von-karman谱,即:
[0035][0036]
公式(2)中,r0为大气相干长度;其中l0为大气湍流内尺度;其中l0为大气湍流外尺度;f为极坐标条件下对应的空间频率。
[0037]
然后利用低频子谐波的方法生成低频相位屏,表示为:
[0038][0039]
公式(3)中,j,l,k,r,p分别为整数,n
x
和ny分别为x方向和y方向的采样总点数,n
p
表示次谐波的阶数,其中:
[0040][0041]
公式(4)中,δx和δy分别为x方向和y方向的采样间隔;为相位屏的空间谱,其与折射率功率谱φn之间的关系为:
[0042][0043]
公式(5)中,k,r,的含义与公式(4)相同;k为波数,k=2π/λ,λ为光波波长。
[0044]
基于改进的von-karman谱,那么折射率功率谱φn表示为:
[0045][0046]
公式(6)中,为折射率结构函数;κ0=2π/l0,κm=5.92/l0,其中l0和l0分别为大气湍流外尺度和内尺度。
[0047]
将公式(4)~(6)带入公式(3),可以求得低频相位屏φ
sh
,最终联合公式(1)可以得到由次谐波法产生的大气湍流相位屏为:
[0048]
φ=φ
hf
φ
sh (7)
[0049]
步骤2,在两个空域不相关的相邻大气湍流相位屏φi和φ
i 1
之间,利用双向二分
拉格朗日插值生成时间相关的m层大气湍流相位屏φ
ij
,φ
ij 1
,
…
,φ
ij m
。
[0050]
双向二分拉格朗日插值的基本思想如图3所示,选取相邻两个空域不相关的大气湍流相位屏,其相位屏间距设为δl,第一次插值生成δl/2处的大气湍流相位屏。然后向左右两个方向同时插值得到δl/4处的大气湍流相位屏,进而再向左右两个方向插值得到δl/8处的大气湍流相位屏,以此类推,最终得到插值的m层大气湍流相位屏。
[0051]
插值的计算方法如下:
[0052]
(1)设待插值处左侧相位屏第i行、第j列的像素点亮度为待插值处右侧相位屏第i行、第j列的像素点的亮度为
[0053]
(2)计算待插值处左右两侧相位屏第i行、第j列的像素点亮度平均值:
[0054][0055]
(3)利用待插值处左右两侧相位屏,计算待插值处的拉格朗日插值。尽管大气湍流相位屏是二维的,但是考虑到插值相位屏上像素点的位置要能够与左右两侧相位屏的像素点位置对应,这样相当于转化为光束传播方向上,求取相同像素坐标处亮度值的插值,用x表示相位屏的序号,用i表示相位屏的亮度值,k 1表示总点数。根据拉格朗日插值多项式,待插值相位屏第i行、第j列的像素点亮度表示如下:
[0056][0057]
公式(9)中,im为已知的第m个相位屏在第i行、第j列处的亮度值,lm(x)为加权系统函数,其表达式为:
[0058][0059]
(4)待插值处相位屏第i行、第j列的最终像素点亮度为左右两侧相位屏亮度平均值与拉格朗日插值相乘后的平方根,由下式给出:
[0060][0061]
(5)对相位屏的i行从1到n
x
遍历,j列从1到ny遍历,即可得到完整的一个插值相位屏。
[0062]
(6)以此插值相位屏为基础,分别向左右两个方向重复步骤(1)~步骤(5),直到生成m层时间相关的相位屏,停止插值。
[0063]
步骤3,若步骤2中所述的m层时间相关的大气湍流相位屏已经完全生成,那么,计算出这m层大气湍流相位屏所产生的相位变化,并记录下来。
[0064]
步骤4,释放步骤2中已经生成的时间相关的m层大气湍流相位屏所占用的存储空间,用于存放下一个m层的时间相关大气湍流相位屏。
[0065]
步骤5,判断仿真是否结束,若未结束,重复步骤2~步骤4。
[0066]
以上内容仅仅是对本发明的构思所作的举例和说明,所属本技术领域的技术人员对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,只要不偏离发明的构思或者超越本权利要求书所定义的范围,均应属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。