1.本发明涉及成像技术领域,具体为一种海底监控成像系统及方法。
背景技术:
2.海洋资源丰富,价值巨大。为了较深入的了解海洋水域内部情况,对海洋内部目标物进行监控识别,海洋监控成像系统得到广泛应用。由于海洋水域内部情况复杂,如暗流、暗礁、鱼群以及其他悬浮物等都会对系统造成影响,使系统设备频繁抖动,影响成像效果,因此现有技术中,有在系统中设置稳定结构,以降低抖动对水下摄像头造成的影响。然而,现有技术中,仍然存在的不足之处在于:现有的海底监控成像系统,通常不具备自动检测水下摄像机抖动幅度的功能,或者是单独额外设置用于检测水下摄像机抖动幅度的结构,增加海底成像系统的成本,而且增加整个设备的重量和体积,实用性差。
技术实现要素:
3.本发明目的之一在于提供一种可以实时自动检测水下摄像机当前抖动幅度的海底监控成像系统。
4.一种海底监控成像系统,包括水下机器人,所述水下机器人包括防水密封壳、位于防水密封壳内部的水下摄像机、辅助照明设备和嵌入式计算机系统,在所述防水密封壳和水下摄像机之间设有稳定结构,所述稳定结构包括水下摄像机安装座、套设在水下摄像机安装座外周的安装环和沿安装环周向均布的多个连接块,所述连接块的内侧面具有与所述水下摄像机安装座外壁曲度一致的曲面,所述稳定结构还包括弹簧,所述弹簧的一端与连接块固定,在防水密封壳的内壁与所述弹簧等数量的设置有压力传感器,所述弹簧的另一端与所述压力传感器固定连接,所述压力传感器与所述嵌入式计算机系统电连接,所述压力传感器,用于采集弹簧施予其的压力数据,所述嵌入式计算机系统,用于接收采集的压力数据,并根据压力数据计算出弹簧周期性的压缩和伸长长度,以此分析出水下摄像机的当前抖动幅度。
5.本发明的有益效果在于:水下摄像机在水下工作时,难免会因为水下水流的流动,悬浮物等的影响而产生抖动,在防水密封壳受到影响而抖动的时候,由于在防水密封壳内壁和水下摄像机之间设置了稳定结构,稳定结构中的弹簧对水下摄像机在拍摄时起到减少抖动的作用,可以提高采集的图像的清晰度;同时,弹簧的另一端,即位于防水密封壳内壁一端与压力传感器固定连接,水下摄像机抖动的幅度越大,带动一侧的弹簧对压力传感器施加的压力越大,压力传感器采集到的压力数据越大,反之压力传感器采集到的压力越小,在弹性系数一定的情况下,由于弹簧所受压力与压缩或伸长长度存在相关性,因此,压力传感器与所述嵌入式计算机系统电连接,嵌入式计算机系统可以根据压力数据计算出弹簧周期性的压缩和伸长长度,从而分析出水下摄像机的当前抖动幅度。
6.本发明的创新之处在于:1、弹簧不仅对水下摄像机起到减少抖动,稳定的作用,还起到类似于压力传感的作用,即通过弹簧的周期性的压缩和伸长长度,来计算出水下摄像
机的当前抖动幅度。2、采用本发明方案,无需单独额外增加用于检测水下摄像机抖动幅度的结构,不会增加监控成像系统中整体设备的重量和体积,压力传感器成本很低,因此也几乎不会增加整个系统的成本,具备较好的实用性。
7.进一步地:在所述防水密封壳内部还设有通信模块,所述嵌入式计算机系统与通信模块电连接,还包括地面监控平台,所述通信模块,用于与地面监控平台通信,在地面监控平台存储有抖动幅度阈值,所述地面监控平台,用于接收水下摄像机的当前抖动幅度,并判断当前抖动幅度是否大于抖动幅度阈值,若是,则向嵌入式计算机系统发出停止拍摄信号,嵌入式计算机系统接收到停止拍摄信号后,用于自动关闭水下摄像机。
8.有益效果:在地面监控平台存储有抖动幅度阈值,地面监控平台接收水下摄像机的当前抖动幅度,并判断当前抖动幅度是否大于抖动幅度阈值,若是,则向嵌入式计算机系统发出停止拍摄信号,嵌入式计算机系统接收到停止拍摄信号后,自动关闭水下摄像机,说明当前水域水流过急或者悬浮物等影响过大,不适合监控拍摄,避免对机体造成损坏或者拍摄无效的画面。通过本设计,可以根据水域情况,实时的进行自动拍摄或者关机。
9.进一步地:在防水密封壳内部与水下摄像机并列设置的还有二维声纳设备,所述二维声纳设备,用于发出声纳探测水下目标并获取声纳图像,所述嵌入式计算机系统包括图像融合子系统,所述图像融合子系统,根据水下摄像机和二维声纳设备视场大小的比例,标记出水下摄像头采集的图像中存在目标的条带区域,条带宽度为目标对应的宽度,图像融合子系统对图像进行灰度化处理、图像滤波、二值化分割、像素消融及聚类算法处理,获取目标的高度。
10.有益效果:通过将水下摄像机和二维声纳设备结合使用,并通过图像融合子系统,根据水下摄像机和二维声纳设备视场大小的比例,标记出水下摄像头采集的图像中存在目标的条带区域,条带宽度为目标对应的宽度,图像融合子系统对图像进行灰度化处理、图像滤波、二值化分割、像素消融及聚类算法处理,获取目标的高度,以此来达到准确的获取目标物的宽度和高度的效果。
11.进一步地:所述的图像滤波采用基于灰度直方图的多图像平均法,连续取同一部位的n幅图像,比较n幅图像的灰度直方图,对其中m幅图像灰度值与其他图像灰度值相差较大的图像,进行叠加平均时将m幅图像去除。
12.有益效果:若m幅图像灰度值与其他图像灰度值相差较大的图像,则说明拍摄该辐图像时,镜头前出现了对图像造成干扰的悬浮物,如鱼群,因此,在进行叠加平均时将m幅图像去除,避免悬浮物造成的影响。
13.进一步地:所述的水下摄像机的镜头采用多个透镜组合,其中若干个透镜的前后两镜面至少有一面是非球面,且其中两个透镜胶合在一起形成透镜组。
14.有益效果:在本发明设计中,水下摄像机的镜头采用多个透镜组合,其中若干个透镜的前后两镜面至少有一面是非球面,采用非球面的设计,避免了全部采用球面镜片产生的球面像差和畸变,有利于相差的校正,减少色差,提高整个视场的像质,并且其中两个透镜胶合在一起形成透镜组,使得成像颜色分明,色彩与像面还原性好。
15.进一步地:所述的水下摄像机包括一个主摄像头和位于主摄像头两侧对称设置的两个辐摄像头,主摄像头采用超清镜头,其中一个辐摄像头采用广角镜头,另一个辐摄像头采用微距镜头,所述水下机器人还包括旋转云台,所述旋转云台包括微调机构,所述嵌入式
计算机系统,还用于控制微调机构,所述的水下摄像机安装座与微调机构连接。
16.有益效果:采用一主,两辐的摄像头方式,可以避免水下拍摄摄像焦距变大,视场角变小的问题,可以拓宽视野,实现微距拍摄;同时,本发明方案中,旋转云台包括微调机构,所述嵌入式计算机系统控制微调机构,所述的水下摄像机安装座与微调机构连接,在将水下摄像机放到水下指定位置后,若拍摄角度等还存在小问题,需要调整的,无需对整个防水密封壳以及内部各设备进行大的调整,以免大的调整对其他设备的拍摄(如二维声纳设备)角度造成影响,比如在只有两个辐摄像头拍摄角度有小问题时,可以采用微调机构带动水下摄像头安装座小角度转动来实现微调。由于安装环是套设在水下摄像头安装座外周的,因此水下摄像头安装座的转动,不会对安装环造成影响。
17.进一步地:在所述水下摄像头安装座外周开有一圈凹槽,所述安装环和连接块均位于凹槽内,所述水下摄像头安装座在微调机构带动下可在安装环内旋转微调。
18.有益效果:通过凹槽、安装环和连接块的配合设计,在水下摄像头安装座转动时,安装环、连接块和弹簧对水下摄像头安装座起到转动导向的作用。
19.本发明的目的之二在于提供一种可以实时自动检测水下摄像机当前抖动幅度的海底监控成像方法。
20.一种海底监控成像方法,包括通过防水密封壳和水下摄像机之间设置的稳定结构,来对抖动进行消除补偿,所述稳定结构中包括弹簧;还包括通过弹簧与防水密封壳内壁之间设置的压力传感器,来采集弹簧施予压力传感器的压力数据,所述采集的压力数据传给设置在防水密封壳内部的嵌入式计算机系统,嵌入式计算机系统根据压力数据计算出弹簧周期性的压缩和伸长长度,以此分析出水下摄像机的当前抖动幅度。
21.本发明中方法的有益效果在于:
22.稳定结构中的弹簧对水下摄像机在拍摄时起到减少抖动的作用,可以提高采集的图像的清晰度;同时,水下摄像机抖动的幅度越大,带动一侧的弹簧对压力传感器施加的压力越大,压力传感器采集到的压力数据越大,反之压力传感器采集到的压力越小,在弹性系数一定的情况下,弹簧所受压力与压缩或伸长长度存在相关性,因此,嵌入式计算机系统可以根据压力数据计算出弹簧周期性的压缩和伸长长度,从而分析出水下摄像机的当前抖动幅度。
23.进一步地,还包括通过地面监控平台,接收水下摄像机的当前抖动幅度,并判断当前抖动幅度是否大于抖动幅度阈值,若是,则向嵌入式计算机系统发出停止拍摄信号,嵌入式计算机系统接收到停止拍摄信号后,并自动关闭水下摄像机。
24.有益效果:通过地面监控平台,接收水下摄像机的当前抖动幅度,并判断当前抖动幅度是否大于抖动幅度阈值,若是,则向嵌入式计算机系统发出停止拍摄信号,可以根据水域情况,实时的进行自动拍摄或者关机。
25.进一步地,还包括通过与水下摄像机并列设置的二维声纳设备,发出声纳探测水下目标并获取声纳图像,通过嵌入式计算机系统中的图像融合子系统,根据水下摄像机和二维声纳设备视场大小的比例,标记出水下摄像头采集的图像中存在目标的条带区域,条带宽度为目标对应的宽度,图像融合子系统对图像进行灰度化处理、图像滤波、二值化分割、像素消融及聚类算法处理,获取目标的高度。
26.有益效果:通过上述方法,将水下摄像机和二维声纳设备结合使用,并通过图像融
合子系统,可以准确的获取到目标物的宽度和高度数据。
附图说明
27.图1为本发明一种海底监控成像系统实施例的结构示意图;
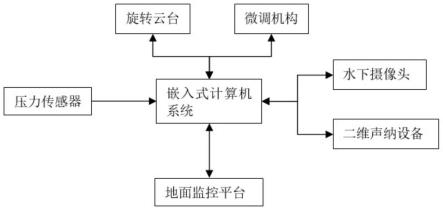
28.图2为本发明一种海底监控成像系统实施例的示意性框图。
具体实施方式
29.下面通过具体实施方式进一步详细说明:
30.说明书附图中的附图标记包括:防水密封壳1、水下摄像机2、二维声纳设备3、水下摄像机安装座4、安装环5、连接块6、弹簧7、压力传感器8、微调机构9、旋转云台10。
31.如附图1和附图2所示,本实施例所公开的一种海底监控成像系统,包括水下机器人,所述水下机器人包括旋转云台、工作设备和嵌入式计算机系统,旋转云台和工作设备分别与嵌入式计算机系统电连接,嵌入式计算机系统,用于控制旋转云台旋转,进而通过旋转云台带动工作设备旋转,从而实现拍摄角度等的调节,嵌入式计算机系统,还用于与工作设备进行指令和数据的交互,从而达到控制工作设备工作与否,以及对工作设备采集到的数据进行分析的目的。以上均为现有技术,在此不再赘述。对于本系统,进一步具体阐述如下:
32.如附图1所示,本实施例中,所述的工作设备包括防水密封壳、位于防水密封壳内部的水下摄像机和辅助照明设备,其中,嵌入式计算机系统也设置在防水密封壳内。
33.在本实施例中,所述的水下摄像机的镜头采用多个透镜组合,本实施例中采用八个透镜组合,其中若干个透镜的前后两镜面至少有一面是非球面,具体是第二、第四、第七和第八透镜的前后两个镜面至少有一面是非球面,且其中两个透镜胶合在一起形成透镜组,具体是第五和第六透镜胶合在一起形成透镜组,以此达到较好的还原色彩和像面的效果。
34.本实施例中,具体的所述的水下摄像机包括一个主摄像头和位于主摄像头两侧对称设置的两个辐摄像头,主摄像头采用超清镜头,其中一个辐摄像头采用广角镜头,另一个辐摄像头采用微距镜头。辅助照明设备包括分别与主摄像头和两个辐摄像头对应设置的三个照明设备,本实施例中,照明设备采用水下固态冷光源。
35.在防水密封壳内部与水下摄像机并列设置的还有二维声纳设备,所述二维声纳设备,用于发出声纳探测水下目标并获取声纳图像,所述嵌入式计算机系统包括图像融合子系统,所述图像融合子系统,根据水下摄像机和二维声纳设备视场大小的比例,标记出水下摄像头采集的图像中存在目标的条带区域,条带宽度为目标对应的宽度,图像融合子系统对图像进行灰度化处理、图像滤波、二值化分割、像素消融及聚类算法处理,获取目标的高度。
36.本实施例中,辅助照明设备还包括与二维声纳设备配合使用的激光辅助照明设备,即激光器。
37.本实施例所述的图像滤波采用基于灰度直方图的多图像平均法,连续取同一部位的n幅图像,比较n幅图像的灰度直方图,对其中m幅图像灰度值与其他图像灰度值相差较大的图像,进行叠加平均时将m幅图像去除。
38.本实施例中,在所述防水密封壳和水下摄像机之间设有稳定结构,所述稳定结构
包括水下摄像机安装座,本实施例中,所述旋转云台包括微调机构,所述嵌入式计算机系统,还用于控制微调机构,所述的水下摄像机安装座与微调机构连接。
39.稳定结构还包括套设在水下摄像机安装座外周的安装环和沿安装环周向均布的多个连接块,本实施例为两个,所述连接块的内侧面具有与所述水下摄像机安装座外壁曲度一致的曲面。在所述水下摄像头安装座外周开有一圈凹槽,所述安装环和连接块均位于凹槽内,所述水下摄像头安装座在微调机构带动下可在安装环内旋转微调。
40.所述稳定结构还包括弹簧,所述弹簧的一端与连接块固定,在防水密封壳的内壁与所述弹簧等数量的设置有压力传感器,所述弹簧的另一端与所述压力传感器固定连接。
41.所述压力传感器与所述嵌入式计算机系统电连接,所述压力传感器,用于采集弹簧施予其的压力数据,所述嵌入式计算机系统,用于接收采集的压力数据,并根据压力数据计算出弹簧周期性的压缩和伸长长度,以此分析出水下摄像机的当前抖动幅度。
42.在所述防水密封壳内部还设有通信模块,所述嵌入式计算机系统与通信模块电连接,还包括地面监控平台,所述通信模块,用于与地面监控平台通信,在地面监控平台存储有抖动幅度阈值,所述地面监控平台,用于接收水下摄像机的当前抖动幅度,并判断当前抖动幅度是否大于抖动幅度阈值,若是,则向嵌入式计算机系统发出停止拍摄信号,嵌入式计算机系统接收到停止拍摄信号后,用于自动关闭水下摄像机。
43.本实施例还公开了一种基于海底监控成像系统的海底监控成像方法,该方法包括通过防水密封壳和水下摄像机之间设置的稳定结构,来对抖动进行消除补偿,所述稳定结构中包括弹簧;其特征在于:还包括通过弹簧与防水密封壳内壁之间设置的压力传感器,来采集弹簧施予压力传感器的压力数据,所述采集的压力数据传给设置在防水密封壳内部的嵌入式计算机系统,嵌入式计算机系统根据压力数据计算出弹簧周期性的压缩和伸长长度,以此分析出水下摄像机的当前抖动幅度。
44.在本方法中,还包括通过地面监控平台,接收水下摄像机的当前抖动幅度,并判断当前抖动幅度是否大于抖动幅度阈值,若是,则向嵌入式计算机系统发出停止拍摄信号,嵌入式计算机系统接收到停止拍摄信号后,并自动关闭水下摄像机。
45.在本方法中,还包括通过与水下摄像机并列设置的二维声纳设备,发出声纳探测水下目标并获取声纳图像,通过嵌入式计算机系统中的图像融合子系统,根据水下摄像机和二维声纳设备视场大小的比例,标记出水下摄像头采集的图像中存在目标的条带区域,条带宽度为目标对应的宽度,图像融合子系统对图像进行灰度化处理、图像滤波、二值化分割、像素消融及聚类算法处理,获取目标的高度。
46.以上所述的仅是本发明的实施例,所属领域普通技术人员知晓申请日或者优先权日之前发明所属技术领域所有的普通技术知识,能够获知该领域中所有的现有技术,并且具有应用该日期之前常规实验手段的能力,所属领域普通技术人员可以在本技术给出的启示下,结合自身能力完善并实施本方案,一些典型的公知结构或者公知方法不应当成为所属领域普通技术人员实施本技术的障碍。
47.应当指出,对于本领域的技术人员来说,在不脱离本发明结构的前提下,还可以作出若干变形和改进,这些也应该视为本发明的保护范围,这些都不会影响本发明实施的效果和专利的实用性。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。