技术特征:
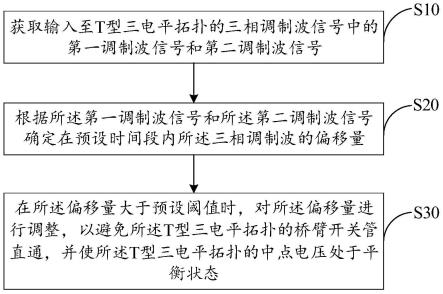
1.一种避免桥臂开关管直通控制方法,其特征在于,所述避免桥臂开关管直通控制方法包括以下步骤:获取输入至t型三电平拓扑的三相调制波信号中的第一调制波信号和第二调制波信号;根据所述第一调制波信号和所述第二调制波信号确定在预设时间段内所述三相调制波的偏移量;在所述偏移量大于预设阈值时,对所述偏移量进行调整,以避免所述t型三电平拓扑的桥臂开关管直通,并使所述t型三电平拓扑的中点电压处于平衡状态。2.如权利要求1所述的避免桥臂开关管直通控制方法,其特征在于,所述获取输入至t型三电平拓扑的三相调制波信号中的第一调制波信号和第二调制波信号的步骤,具体包括:获取输入至t型三电平拓扑的三相调制波信号中的最大电压值和最小电压值;根据所述最大电压值和所述最小电压值确定所述三相调制波中的第一调制波信号和第二调制波信号。3.如权利要求2所述的避免桥臂开关管直通控制方法,其特征在于,所述根据所述第一调制波信号和所述第二调制波信号确定在预设时间段内所述三相调制波的偏移量的步骤之后,还包括:在所述偏移量小于预设阈值时,判定所述t型三电平拓扑的桥臂开关管未处于直通状态。4.如权利要求2所述的避免桥臂开关管直通控制方法,其特征在于,所述在所述偏移量大于预设阈值时,对所述偏移量进行调整,以避免所述t型三电平拓扑的桥臂开关管直通,并使所述t型三电平拓扑的中点电压处于平衡状态的步骤,具体包括:在所述偏移量大于预设阈值时,对所述偏移量进行调整,以使调整后的偏移量满足预设条件;在所述调整后的偏移量满足所述预设条件时,判定所述t型三电平拓扑的桥臂开关管未处于直通状态,并使所述t型三电平拓扑的中点电压处于平衡状态。5.如权利要求4所述的避免桥臂开关管直通控制方法,其特征在于,所述在所述偏移量大于预设阈值时,对所述偏移量进行调整,以使调整后的偏移量满足预设条件的步骤之前,还包括:对所述第一调制波信号和所述第二调制波信号分别进行正值处理,获得处理后的第一调制波信号和处理后的第二调制波信号;根据所述偏移量对所述处理后的第一调制波信号和所述处理后的第二调制波信号分别进行补偿,获得补偿后的第一调制波信号和补偿后的第二调制波信号;根据所述补偿后的第一调制波信号和所述补偿后的第二调制波信号确定预设条件。6.如权利要求5所述的避免桥臂开关管直通控制方法,其特征在于,所述根据所述补偿后的第一调制波信号和所述补偿后的第二调制波信号确定预设条件的步骤,具体包括:通过第一预设公式根据所述补偿后的第一调制波信号和所述补偿后的第二调制波信号确定预设条件,其中,第一预设公式为:
式中,v
i_off
表示偏移量,vin表示补偿后的第一调制波信号,vip表示补偿后的第二调制波信号。7.一种避免桥臂开关管直通的逆变器,其特征在于,所述避免桥臂开关管直通的逆变器包括:逆变模块,包括多组开关桥臂,每组桥臂上有上、下对称的开关管;控制模块,所述控制模块为dsp、cpu、fpga、cpld、arm等控制芯片;驱动模块,输入端连接于所述控制芯片,输出端连接于所述开关管;所述控制模块,用于获取输入至逆变器的三相调制波信号中的第一调制波信号和第二调制波信号;根据所述第一调制波信号和所述第二调制波信号确定在预设时间段内所述三相调制波的偏移量;在所述偏移量大于预设阈值时,对所述偏移量进行调整,以避免所述逆变器的开关桥臂上的开关管直通,并使所述t型三电平拓扑的中点电压处于平衡状态。8.一种避免桥臂开关管直通控制设备,其特征在于,所述设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的避免桥臂开关管直通控制程序,所述避免桥臂开关管直通控制程序配置为实现如权利要求1至6中任一项所述的避免桥臂开关管直通控制方法的步骤。9.一种存储介质,其特征在于,所述存储介质上存储有避免桥臂开关管直通控制程序,所述避免桥臂开关管直通控制程序被处理器执行时实现如权利要求1至6中任一项所述的避免桥臂开关管直通控制方法的步骤。
技术总结
本发明属于三电平拓扑领域,公开一种避免桥臂开关管直通控制方法、逆变器、设备及存储介质。本发明通过获取输入至T型三电平拓扑的三相调制波信号中的第一调制波信号和第二调制波信号,然后根据第一调制波信号和第二调制波信号确定在预设时间段内三相调制波的偏移量,并且在偏移量大于预设阈值时,对偏移量进行调整,以避免T型三电平拓扑的桥臂开关管直通,并使T型三电平拓扑的中点电压处于平衡状态。本发明通过在中点控制偏移量大于预设阈值时,对偏移量进行调整,适用于T型三电平拓扑,并且在偏移量大于预设阈值时,对偏移量进行适应性调整,能够避免T型三电平系统的桥臂开关管直通,并且能够使T型三电平拓扑的中点电压处于平衡状态。处于平衡状态。处于平衡状态。
技术研发人员:刘富广 范发靖 王志川 杨文
受保护的技术使用者:苏州汇川控制技术有限公司
技术研发日:2022.04.27
技术公布日:2022/7/15
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。