1.本发明涉及交直流互联系统稳定分析技术领域,尤其涉及一种基于稳定裕度的交直流互联系统稳定边界确定方法。
背景技术:
2.近年来,随着电网的扩建与输送容量的不断提高,采用电网换相换流器的高压直流输电系统在电力系统大量应用。直流线路故障引发的交直流互联系统暂态稳定问题愈发突出,严重威胁系统稳定运行。
3.目前,针对交直流互联系统暂态功角稳定问题的研究方法主要分为时域仿真法、人工智能法和暂态能量函数法。时域仿真法通过求解系统的微分代数方程组,以获得系统状态量随时间的变化轨迹,具有适用性强、精度高等优势,但同时存在所需计算量大、计算设备要求高等缺陷。人工智能法通过复杂数据关系的拟合,实现基于数据驱动的问题分析,但由于其未考虑物理因果关系的约束,研究结果的可解释性较差。暂态能量函数法通过构建暂态能量函数分析电力系统暂态稳定性,具有计算速度快、可实现稳定裕度量化评估等优点。然而,现有方法大多仅考虑交流线路故障情况下的稳定评估,同时将直流等效为准稳态模型,无法详细计及直流线路故障中,换流器导通拓扑变化以及直流电气量的大幅波动对于能量函数的影响,使得暂态能量函数法在直流线路故障情况下失效,进而也无法确定系统准确的稳定边界,使得系统发生直流故障时难以进行及时的控制。
4.因此,现有的交直流互联系统稳定分析方法,未考虑直流线路发生故障的具体影响,难以准确确定系统稳定边界和对交直流互联系统稳定情况进行准确分析。
技术实现要素:
5.鉴于上述的分析,本发明实施例旨在提供一种基于稳定裕度的交直流互联系统稳定边界确定方法,用以解决现有的交直流互联系统稳定分析方法,未考虑直流线路发生故障的具体影响,难以准确确定系统稳定边界和对交直流互联系统稳定情况进行准确分析的问题。
6.本发明实施例提供了一种基于稳定裕度的交直流互联系统稳定边界确定方法,包括以下步骤:
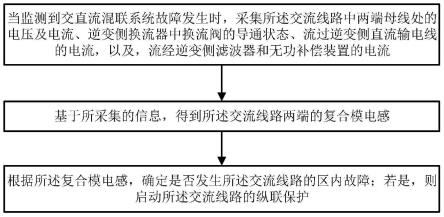
7.当检测到交直流互联系统发生直流线路故障,采集交直流互联系统的运行参数;
8.根据采集的运行参数,得到系统加速能量、系统裕度能量和系统位置能量,进而得到稳定裕度指标;
9.基于所述稳定裕度指标,得到交直流互联系统的稳定边界。
10.进一步地,所述交直流互联系统的运行参数包括:
11.同步机端口、整流器端口y桥、交流线路送端、交流线路受端的变压器变比;同步机内电感、整流器换相电感、交流线路电感以及整流侧平波电抗器电感;同步机等值内电势幅值;系统受端电网电压幅值;系统送端同步机转速;原动机输入同步机端口的功率;故障点
与整流器出口的距离和直流线路单位长度电阻。
12.进一步地,所述系统加速能量w
acc
表示为:
[0013][0014]
式中,为系统在移相触发前过程内的加速能量,为系统在移相触发中过程内的加速能量。
[0015]
进一步地,系统在移相触发前过程内的加速能量表示为:
[0016][0017]
其中,
[0018][0019][0020][0021][0022]
l
eq
=4l
rr
lr;
[0023]
式中,pm为原动机输入同步机端口的功率,δ为送端同步发电机功角,kg、kr、k
acr
、k
aci
分别为同步机端口、整流器端口y桥、交流线路送端、交流线路受端的变压器变比;d为故障点与整流器出口的距离;r为直流线路单位长度电阻;ld、l
rr
、l
ac
、lr分别为同步机内电感、整流器换相电感、交流线路电感以及整流侧平波电抗器电感;em为同步机等值内电势幅值;um分别为受端电网电压幅值;ω送端同步机转速。
[0024]
进一步地,系统在移相触发中过程内的加速能量表示为:
[0025][0026]
其中,
[0027][0028][0029]k15
=kgωld。
[0030]
进一步地,所述系统裕度能量w
mar
表示为:
[0031][0032]
式中,δu为系统故障后不稳定平衡点所对应的功角,δ
sp
为系统故障后稳定平衡点所对应的功角。
[0033]
进一步地,所述系统位置能量w
pos
表示为:
[0034][0035]
进一步地,所述稳定裕度指标η表示为:
[0036][0037]
进一步地,通过以下方式得到所述交直流互联系统的稳定边界:
[0038]
根据η=0,得到移相触发结束时刻对应的功角,进而得到移相触发开始时刻对应的功角,将移相触发开始时刻对应功角对应的移相触发开始时刻作为交直流互联系统的稳定边界。
[0039]
进一步地,还包括基于所述稳定裕度指标评估交直流互联系统的稳定性状态:
[0040]
当移相触发中过程结束时刻所对应的系统稳定裕度指标为正时,系统处于稳定状
态;
[0041]
当移相触发中过程结束时刻所对应的系统稳定裕度指标为零时,系统处于临界稳定状态;
[0042]
当移相触发中过程结束时刻所对应的系统稳定裕度指标为负时,系统处于失稳状态。
[0043]
与现有技术相比,本发明至少可实现如下有益效果之一:
[0044]
本发明提供的一种基于稳定裕度的交直流互联系统稳定边界确定方法在检测到系统发生直流线路故障时,采集交直流互联系统的运行参数,根据运行参数和考虑直流系统故障得到的反映系统转速的加速能量、反映功角摆开幅度的位置能量以及系统抵御失稳能力的裕度能量,建立系统稳定裕度指标,进而得到交直流互联系统稳定边界,能够准确确定系统稳定边界,使得交直流并联系统的控制装置能够根据稳定边界更及时的控制移相触发,保证系统稳定,并且该方法还能够根据稳定裕度指标对交直流互联系统稳定情况进行准确分析。
[0045]
本发明中,上述各技术方案之间还可以相互组合,以实现更多的优选组合方案。本发明的其他特征和优点将在随后的说明书中阐述,并且,部分优点可从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过说明书以及附图中所特别指出的内容中来实现和获得。
附图说明
[0046]
附图仅用于示出具体实施例的目的,而并不认为是对本发明的限制,在整个附图中,相同的参考符号表示相同的部件。
[0047]
图1为本发明实施例1中基于稳定裕度的交直流互联系统稳定边界确定方法流程图;
[0048]
图2为本发明实施例1中交直流互联系统故障前示意图;
[0049]
图3为本发明实施例1中交直流互联系统直流线路接地短路示意图;
[0050]
图4为本发明实施例1中整流器导通状态图;
[0051]
图5为本发明实施例1中交直流互联系统故障后示意图;
[0052]
图6为本发明实施例2中仿真系统结构图;
[0053]
图7为本发明实施例2中临界稳定与失稳对比图;
[0054]
图8为本发明实施例2中故障位置对稳定性影响图;
[0055]
图9为本发明实施例2中故障距离对稳定裕度的影响图;
[0056]
图10为本发明实施例2中移相触发时间对稳定性影响图;
[0057]
图11为本发明实施例2中移相触发时间对稳定裕度的影响图;
[0058]
图12为本发明实施例2中示例系统的稳定域图;
[0059]
图13为本发明实施例2中稳定边界对比图。
具体实施方式
[0060]
下面结合附图来具体描述本发明的优选实施例,其中,附图构成本技术一部分,并与本发明的实施例一起用于阐释本发明的原理,并非用于限定本发明的范围。
[0061]
实施例1
[0062]
本发明的一个具体实施例,公开了一种基于稳定裕度的交直流互联系统稳定边界确定方法,如图1所示,包括以下步骤:
[0063]
s1、当检测到交直流互联系统发生直流线路故障,采集交直流互联系统的运行参数。
[0064]
实施时,所述交直流互联系统的运行参数包括:同步机端口、整流器端口y桥、交流线路送端、交流线路受端的变压器变比;同步机内电感、整流器换相电感、交流线路电感以及整流侧平波电抗器电感;同步机等值内电势幅值;系统受端电网电压幅值;系统送端同步机转速;原动机输入同步机端口的功率;故障点与整流器出口的距离和直流线路单位长度电阻。
[0065]
具体地,直流线路故障为直流线路某处发生金属性短路接地故障;交直流互联系统故障前的系统示意图如图2所示,在直流线路某处发生金属性短路接地故障时,系统尚未感知故障的发生,系统仍采用常规控制方式,并且由于接地点(故障点)的存在,逆变侧对于送端短路电流的影响可忽略不计,因此,交直流互联系统直流线路接地短路时的示意图如图3所示,送端同步机采用二阶模型等值,受端等效为一无穷大电网。
[0066]
s2、根据采集的运行参数,得到系统加速能量、系统裕度能量和系统位置能量,进而得到稳定裕度指标;
[0067]
实施时,所述系统加速能量w
acc
表示为:
[0068][0069]
式中,为系统在移相触发前过程内的加速能量,为系统在移相触发中过程内的加速能量。
[0070]
具体地,系统在移相触发前过程内的加速能量表示为:
[0071][0072]
其中,
[0073][0074][0075]
[0076][0077]
l
eq
=4l
rr
lr;
[0078]
式中,pm为原动机输入同步机端口的功率,δ为送端同步发电机功角,kg、kr、k
acr
、k
aci
分别为同步机端口、整流器端口y桥、交流线路送端、交流线路受端的变压器变比;d为故障点与整流器出口的距离;r为直流线路单位长度电阻;ld、l
rr
、l
ac
、lr分别为同步机内电感、整流器换相电感、交流线路电感以及整流侧平波电抗器电感;em为同步机等值内电势幅值;um分别为受端电网电压幅值;ω送端同步机转速。
[0079]
具体地,系统在移相触发中过程内的加速能量表示为:
[0080][0081]
其中,
[0082][0083][0084]k15
=kgωld。
[0085]
实施时,所述系统裕度能量w
mar
表示为:
[0086]
[0087]
式中,δu为系统故障后不稳定平衡点所对应的功角,δ
sp
为系统故障后稳定平衡点所对应的功角。
[0088]
实施时,所述系统位置能量w
pos
表示为:
[0089][0090]
需要说明的是,步骤s2中确定系统加速能量、系统裕度能量和系统位置能量,是通过以下分析得到:
[0091]
s21、根据交直流互联系统电气参数及网络拓扑,计算系统各端口电压、电流表达式。
[0092]
在移相触发前,以a相电动势相角为零作为参考相位,可以得到同步机内电势表达式为:
[0093][0094]
式中,ea、eb、ec分别表示同步机的a、b、c三相电势。
[0095]
受端电网电压表达式为:
[0096][0097]
式中,ua、ub、uc分别表示受端电网的a、b、c三相电压。
[0098]
以送端同步机a相电流i
ga
作为中间变量,表示各端口电压和电流如下:
[0099]
根据同步机端口的电气结构,可得同步机出口电压表达式:
[0100][0101]
需要说明的是,同步机端口、整流器端口及交流线路端口汇于一点,由图3所示,因此,同步机端口、整流器端口及交流线路端口的电压表达式均如上式所示。
[0102]
根据同步机端口的电气结构,得到同步机端口a相电流i
ga
表达式为:
[0103][0104]
由同步机电动势相位条件可知,d、y两桥均为cb线电压最大,因此晶闸管的导通状态应为d、y桥均为5、6阀导通,此时整流器的网络拓扑如图4所示。d、y两桥整流侧变压器低压侧a、b、c三相电流分别为0、-i
dc
、i
dc
。需要说明的是在该故障条件下,不存在其他导通情况。
[0105]
结合同步机端口电压表达式,可以得到直流线路电流i
dc
的表达式为:
[0106]
[0107]
其中:
[0108][0109]
式中,i
′
gc
表示同步机c相电流的导数。
[0110]
由图4所示的导通状态,可以得到整流器端口电流与直流电流的关系:
[0111][0112]
联立直流线路表达式(10)及整流器端口与直流电流的关系式(11),可以得到整流器端口a相电流:
[0113][0114]
根据交流线路两端电压及线路的电气结构,可以得到交流线路端口a相电流表达式:
[0115][0116]
将中间变量i
ga
消除,得到各端口电压显式表达式,具体如下:
[0117]
根据kcl定理,有:
[0118]ira
i
aca
=i
ga
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(14)
[0119]
将整流器端口a相电流式(12)、交流线路端口a相电流式(13)及同步机端口a相电流式(9)代入上式,可以得到同步机a相电流的显式表达式:
[0120]iga
=m1sinωt m2cosωt
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(15)
[0121]
其中:
[0122][0123]
[0124][0125][0126][0127]
l
eq
=4l
rr
lr;
[0128]
将同步机端口a相电流显式表达式(15)代入同步机端口a相电压表达式(9),可得其显式表达式:
[0129]uga
=(k
14
k
15
m2)sinωt-k
15
m1cosωt
ꢀꢀꢀꢀꢀꢀ
(16)
[0130]
将同步机端口a相电流显式表达式(15)代入整流器端口a相电流表达式(12),可得其显式表达式:
[0131][0132]
将同步机端口a相电流显式表达式(15)代入交流线路端口a相电流表达式(13),可得其显式表达式:
[0133]iaca
=(k
12-k
13
m1)sinωt (k
11-k
13
m2)cosωt
ꢀꢀꢀꢀꢀ
(18)
[0134]
s22、根据系统各端口电压、电流和系统的动态能量函数方程,按移相触发前、移相触发中及移相触发后过程进行积分,得到系统加速能量、位置能量及裕度能量解析表达式。
[0135]
构建动态能量函数如下:
[0136]
通过对节点瞬时电压及节点瞬时电流沿轨迹积分,构建动态能量表达式为:
[0137]
w=∫pmdδ-[∫iddu
q-iqdud ∫(idud iquq)dδ]
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(19)
[0138]
式中,xd、xq分别表示同步机、整流器、交流线路的端口电压、电流在dq坐标系下的分量;pm为原动机输入同步机端口的功率。可以理解的,整流器和交流线路的端口内不含原动机,因此其恒为零,对于同步机端口,认为是一定值,因此,pm表示原动机输入同步机端口的功率。
[0139]
需要说明的是,上述dq坐标系下的分量是由dq变换得到的,dq变换的表达式为:
[0140][0141]
其中,xa、xb、xc分别表示电气量在静止坐标系下的a、b、c相分量,xd、xq分别表示电气量在同步旋转坐标系下的d、q轴分量。
[0142]
根据同步机端口电压、电流和动态能量表达式,可得系统在移相触发前过程内的加速能量表达式为:
[0143][0144]
当直流保护系统检测到直流线路存在故障时,送端控制系统将进行移相触发操作,将触发角调至120
°
,迫使短路电流回落。移相触发过程中,交直流互联系统的网络拓扑与故障中状态下无异,仍如图3所示。
[0145]
触发角的改变,导致整流器导通情况与电动势相位之间的关系产生变化。在移相触发过程中,同步机电动势的相位应为:
[0146][0147]
根据式(22)依照步骤s21的过程再次求解系统同步机端口的电压、电流,并将其代入式(19),可得到系统在移相触发中过程内的加速能量表达式:
[0148][0149]
在直流系统切除后,系统转换为交流系统,其拓扑结构如图5所示。根据其拓扑结构,可以得到同步机端口电压电流表达式为:
[0150][0151]
根据式(23)和式(19),得到系统位置能量解析表达式为:
[0152][0153]
其中,δu为系统故障后不稳定平衡点所对应的功角,δ
sp
为系统故障后稳定平衡点所对应的功角。
[0154]
位置能量在扰动过程当中累积,但需要按照移相触发后过程的系统拓扑进行计算,因此,位置能量表达式与稳定裕度表达式相似,仅积分上下限不同,系统位置能量解析表达式为:
[0155][0156]
需要说明的是,以其他相分析可得到相同的系统加速能量、系统位置能量和系统裕度能量表达式。
[0157]
可以理解的,通过考虑直流系统发生故障后的直流系统换流器详细拓扑构造动态能量,得到系统加速能量、系统位置能量和系统裕度能量,有利于降低计算量,缩短结果求解时间。
[0158]
实施时,步骤s2中的所述稳定裕度指标η表示为:
[0159][0160]
可以理解的,系统加速能量与系统位置能量反映系统的失稳倾向,而系统裕度能量定量刻画了系统抵御失稳的能力,将裕度能量与其余2部分能量作差,可以得到系统剩余能量表达式,即稳定裕度指标η。
[0161]
s3、基于所述稳定裕度指标,得到交直流互联系统的稳定边界。
[0162]
实施时,通过以下方式得到所述交直流互联系统的稳定边界:
[0163]
根据η=0,得到移相触发结束时刻对应的功角,进而得到移相触发开始时刻对应的功角,将移相触发开始时刻对应功角对应的移相触发开始时刻作为交直流互联系统的稳定边界,表示为:
[0164]
ts|η(tc)=0;
[0165]
式中,ts表示移相触发开始时刻,tc表示移相触发结束时刻。
[0166]
具体地,根据η=0得到的移相触发结束时刻对应的功角得到移相触发开始时刻对应的功角,具体为:
[0167]
移相触发过程的结束时刻为直流电流的过零点时刻,以a相电动势相角为零作参考相位,在移相触发过程中,直流端口的等效电压为:
[0168][0169]
式中,u
gb
、u
gb
分别表示同步机的b、c相电压。
[0170]
根据式(27)及网络拓扑,得到移相触发过程内直流电流表达式为:
[0171][0172]
式中,i
d0
为移相触发开始时刻ts的直流电流。
[0173]
令式(28)为零,可得到移相触发过程的结束时刻tc与移相触发开始时刻ts的关系式:
[0174][0175]
根据式(10)和式(15)可得出在移相触发开始时刻ts时的直流电流i
d0
为:
[0176][0177]
联立式(29)和式(30),可得出移相触发开始时刻ts。
[0178]
需要说明的是,以其他相分析可得到相同的联立公式(29)和(30)。
[0179]
实施时,本实施例方法还包括基于所述稳定裕度指标评估交直流互联系统的稳定性状态:
[0180]
当移相触发中过程结束时刻所对应的系统稳定裕度指标为正时,系统处于稳定状态;
[0181]
当移相触发中过程结束时刻所对应的系统稳定裕度指标为零时,系统处于临界稳定状态;
[0182]
当移相触发中过程结束时刻所对应的系统稳定裕度指标为负时,系统处于失稳状态。
[0183]
需要说明的是,通过以下分析得到交直流互联系统的稳定边界:
[0184]wacc
在移相触发前过程及移相触发过程中均会累积。对于w
pos
,其累积与否由功角的摆开决定,由于选取了δ
sp
为位置能量零点,则当功角由故障前系统的功角δ0摆向δ
sp
过程中,w
pos
减小,当功角由δ
sp
摆向δu过程中,w
pos
增大。考虑到w
mar
为一定值,因此,在移相触发前及移相触发过程中,η持续降低。在移相触发后过程,系统故障点消失,进入恢复状态,故障轨迹继续滑向失稳边界,但同时同步机转子减速,系统加速能量逐渐耗散,η恢复上升。
[0185]
因此,稳定裕度指标在移相触发结束时刻达到极小值,根据该时刻下稳定裕度指标的正负,即可预判系统的稳定性:当η|δ=δc=0时,系统第一摆稳定,η|δ=δc<0,系统将第一摆失稳,其中,δc为移相触发结束时刻对应的功角。
[0186]
η是各动作流程的起始、结束时刻所对应的功角的函数,然而δ0、δu、δ
sp
均为系统的固有功角,与系统的拓扑结构以及故障前的运行状态相关。δc为移相触发结束时刻对应的功角,可被看作移相触发开始时刻对应的功角δs的函数。因此,δs是影响系统稳定裕度的关键因素。通过改变δs,使得η|δ=δc=0,系统处于临界稳定状态,且δs所对应的移相触发开始时刻即为交直流互联系统的稳定边界。
[0187]
与现有技术相比,本实施例提供的一种基于稳定裕度的交直流互联系统稳定边界确定方法在检测到系统发生直流线路故障时,采集交直流互联系统的运行参数,根据运行参数和考虑直流系统故障得到的反映系统转速的加速能量、反映功角摆开幅度的位置能量以及系统抵御失稳能力的裕度能量,建立系统稳定裕度指标,进而得到交直流互联系统稳定边界,能够准确确定系统稳定边界,使得交直流并联系统的控制装置能够根据稳定边界更及时的控制移相触发,保证系统稳定,解决了现有的稳定边界确定方法采用准稳态模型对直流端口进行等效,使得得到的稳定边界适用性差的问题,并且该方法还能够根据稳定裕度指标对交直流互联系统稳定情况进行准确分析。
[0188]
实施例2
[0189]
为验证本发明实施例1的有效性,本发明的一个具体实施例2中搭建了如图6所示的交直流并联系统仿真结构图为例,设置交直流并联系统运行参数如下表所示。
[0190][0191]
考虑本发明的适用性,本实施例中首先对所提稳定裕度指标进行验证,之后分别对不同移相触发时间即不同故障距离进行验证,最后给出了示例系统的稳定域及稳定边界。
[0192]
(1)针对稳定裕度指标进行验证
[0193]
本实施例所搭建的交直流互联系统的δ
sp
为123.14
°
,经仿真验证可得,当故障类型
为金属性接地故障,且在t=2.185s进行移相触发操作时,系统恰处于临界稳定状态。在相同的故障类型下,将移相触发时间调整为t=2.200s进行仿真,结果如图7所示。
[0194]
在图7中,灰色面为稳定裕度所划定的稳定边界,黑色面为功角所划定的稳定边界;a、b点分别为临界稳定轨迹与失稳域的切点,c、d点分别为失稳轨迹与失稳域的交点。
[0195]
由图7可以看出,在t=2.194s时,临界稳定轨迹的稳定裕度指标降为零,与稳定裕度边界相切于a点,在t=2.477s时,临界稳定轨迹的功角达到δ
sp
,与功角边界相切于b点,整条轨迹均处于稳定域内,由于相切点的存在,此时系统处于临界稳定状态。同时可以看出,在t=2.209s时,失稳轨迹先由c点穿过稳定裕度边界,在t=2.600s时,失稳轨迹的功角达到δ
sp
,由稳定裕度边界下方d点穿过功角边界,此时系统失稳。
[0196]
此外由图7还可以看出,对于稳定轨迹,其稳定裕度指标在δ<δc时总是减小,在δ>δc时总是增大,η|δ=δc为稳定故障轨迹稳定裕度极小值点,且该值为零时,系统轨迹刚好切过功角稳定边界面。
[0197]
综上所述,稳定裕度指标可以反映系统的稳定性,且较时域仿真法更为提前。
[0198]
(2)针对不同故障位置进行验证
[0199]
在移相触发时间为t=2.185s时,分别将故障位置调整至187.3km及374.5km,并同样仿真至单摆最远点,结果如图8所示。
[0200]
在图8中,系统故障轨迹为由a点向d点运动。a点对应于系统故障发生时刻,在故障发生后,送端同步机转速增加,功角逐渐摆开,加速能量开始累积。当系统轨迹到达b点时,转速升至1.022p.u.,功角摆开至73.96
°
,加速能量累积5.040
×
10-4
p.u.,系统进行移相触发操作,直流线路累积的能量返送至送端系统,系统加速能量累积速率有所增加。当系统轨迹到达c点时,直流电流几乎为零,系统转速达到峰值1.023p.u.,加速能量累积同样达到峰值5.558
×
10-4
p.u.,功角摆开至76.21
°
,系统进行去游离操作,闭锁高压直流部分。系统进入故障后状态,此时同步机逐渐减速,转子功角摆开幅度放缓,加速能量逐渐耗散。d点为故障后不稳定平衡点,当故障轨迹到达d点时,同步机转降至额定转速,系统加速能量降至零,宣告系统处于临界稳定状态。a-b段对应移相触发前过程,b-c段对应移相触发过程,c-d段对应移相触发后过程。
[0201]
由图8可以看出,在相同移相触发时间、不同故障位置的情况下,交直流互联系统的故障轨迹具有趋势类似,但并无重叠。当故障位置为187.3km时,其故障全过程中的转速峰值由整流器出口短路时的1.023pu降至1.018pu,加速能量峰值由5.558
×
10-4
pu降至3.315pu,功角的摆开峰值同样从123.1
°
降至92.62
°
。可知,随着故障距离的增加,同步机转子加速趋势放缓,加速能量累积减少,且摆动幅度降低。因此,故障距离的增加舒缓了交直流互联系统暂态稳定的威胁程度。
[0202]
在同样的仿真条件下,选取仿真时间t=2s~2.48s内的稳定裕度仿真结果,如图9所示。
[0203]
由图9可以看出,在上述仿真条件下,不同故障位置所对应的稳定裕度变化轨迹不同。故障前,三种故障情况的稳定裕度相同,均为87.22%。随着故障的发展,各情况下的稳定裕度均降低。在移相触发结束时刻,单重故障情况的稳定裕度分别为0.00%、37.62%、57.88%,随后系统稳定裕度上升,系统最终稳定。稳定裕度与零线相切宣告了系统处于临界稳定状态,与实施例1的推导结果一致。
[0204]
此外,在相同移相触发时间、不同故障距离情况下,各过程内稳定裕度变化趋势相同,但随着故障距离的增加,曲线逐渐上移,意味着直流线路故障对系统稳定影响减小,与实施例1的分析保持一致。
[0205]
(3)针对不同移相触发时间进行验证
[0206]
选取故障位置为整流器出口处的情况,移相触发开始时刻选为t=2.185s、t=2.150s以及t=2.100s,对应的系统轨迹运行至单摆最远点时刻分别为t=2.480s、t=2.355s、t=2.304s。分别选取故障发生至单摆最远点仿真结果,如图10所示。
[0207]
由图10可以看出,在移相触发前,三种情况下故障轨迹完全相同,而移相触发开始时刻的不同改变了能量累积轨迹。在t=2.100s进行移相触发时,移相触发结束时刻系统的转速仅为1.017p.u.,功角为48.08
°
,加速能量累积2.874
×
10-4
p.u。当移相触发时间延迟至t=2.150s时,移相触发结束时刻系统转速增加至1.021p.u.,功角摆开至63.57
°
,加速能量累积4.736
×
10-4
p.u.。最后,当移相触发时间延后至t=2.185s时,系统转速达1.023p.u.,功角摆开至76.21
°
,加速能量累积5.558
×
10-4
p.u.,功角最终摆开至123.1
°
。在移相触发后过程中,三种故障情况下的功角摆开最大值逐步增加,分别为84.41
°
,102.4
°
以及123.1
°
。可知,系统最大转速、加速能量累积以及功角摆开幅度等3方面均表明移相触发时间的提前有利于系统稳定。
[0208]
在相同的仿真条件下,从稳定裕度的角度分析:选取t=2s~2.48s时间段内稳定裕度的仿真结果,如图11所示。
[0209]
由图11可以看出,愈早进行移相触发,即愈早结束移相触发前过程所导致的稳定裕度下降。在经历短暂的移相触发过程后,系统进入故障后状态,稳定裕度趋于恢复。在移相触发时间为2.185s时,移相触发过程结束时刻对应的稳定裕度恰好为零,此时系统处于临界稳定状态,与实施例1推导结果一致。移相触发后过程中,系统稳定裕度上升,系统最终稳定。稳定裕度的过零宣告了系统处于临界稳定状态,与实施例1推导结果一致。在移相触发时间为t=2.150s及t=2.100s时,系统在移相触发结束时刻的稳定裕度分别为26.57%及64.89%,表明移相触发时间的提前有利于系统的稳定,与实施例1理论分析一致。
[0210]
(4)针对系统稳定域及稳定边界的验证
[0211]
针对示例系统的仿真模型,将移相触发时间由t=2.016s以0.001s步长调整至t=2.455s,同时将故障位置由0km以1km步长调整至400km,进行多轮仿真。忽略系统失稳的仿真轮次,记录其余各次仿真内,移相触发结束时刻对应的稳定裕度,如图12所示。该稳定域与z轴零值平面的相交线即为交直流互联系统的稳定边界,如图13所示。
[0212]
由图13可以看出,在各故障情况下,利用本方法计算得出的稳定边界均较时域仿真法保守,且误差范围在1%以内,由此表明本发明实施例1方法计算交直流互联系统稳定边界的有效性。
[0213]
本领域技术人员可以理解,实现上述实施例方法的全部或部分流程,可以通过计算机程序来指令相关的硬件来完成,所述的程序可存储于计算机可读存储介质中。其中,所述计算机可读存储介质为磁盘、光盘、只读存储记忆体或随机存储记忆体等。
[0214]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。