一种基于3d云图的矿石块度智能识别方法及系统
技术领域
1.本技术涉及矿石识别技术领域,尤其涉及一种基于3d云图的矿石块度智能识别方法及系统。
背景技术:
2.矿石性质智能感知与识别是智能矿业领域实现选矿生产过程智能化的基础。智能选矿的核心发展方向:矿石性质识别、浮选装备智能化和基因选矿技术。矿石有价元素品位、粒度和粉碎特性是矿石的各种物理化学性质中最重要的三项基本性质。这三项基本性质决定了实现各有用组分的分选分离、产品的合理利用或综合利用所适用的理论依据和工艺措施,在实际生产中三者的波动更是直接影响选矿作业生产稳定和经济效益,对选矿生产的高效智能控制具有十分重要的意义。
3.其中,对于矿石的粒度识别,随着图像处理及智能控制等方法快速发展,机器视觉技术开始被研究应用于矿石粒度信息的在线监测,但是矿石图像存在矿石粘连、无法有效分割定位,导致粒度分析准确率较低的问题。随着技术的发展,用于在线矿石颗粒粒度测量的商业系统逐渐出现,例如,专利申请号为:cn201810202367.x,名称为《一种基于深度学习的矿石力度检测方法》,虽然能够通过机器学习预测矿石粒度,但是采用的是二维图片学习,预测精度较低;又例如,名称为《基于三维激光点云的爆堆块度分析》,其虽然能够识别矿石粒度大小及分布,但是更专注于大块矿石的识别,在烧结技术领域中,矿石粒度一般在10mm以下,该论文的分析方法满足不了精度需求。
4.综上所述,为了能够精准识别烧结技术领域矿石的粒度大小及分布,提供一种高精度的矿石粒度识别方法或系统,是本领域技术人员亟待解决的技术问题。
技术实现要素:
5.为了能够精准识别烧结技术领域矿石的粒度大小及分布,本技术提供一种基于3d云图的矿石块度智能识别方法及系统。
6.本技术实施例一方面提供一种基于3d云图的矿石块度智能识别方法,包括:
7.通过线扫激光发射器和三维相机获取矿石颗粒的三维点云图像,并将三维点云图像转化为三维点云坐标;
8.对所述三维点云坐标进行点云滤波处理,获得滤波点云坐标,所述滤波处理包括降采样、剔除离群点和修复缺失点;
9.提取滤波点云坐标的z坐标值,对所述z坐标值进行k均值聚类分割,获得k1个簇群,所述k1为大于1的正整数;
10.计算每一个簇群的中心点数值,将k1个簇群的中心点数值最大的数值作为分割阈值;
11.将滤波点云坐标中z坐标值大于分割阈值的点云去除,获得目标区域点云坐标;
12.对所述目标区域点云坐标进行颗粒分割处理,获得单个颗粒点云坐标;
13.对所有单个颗粒点云坐标进行粒径计算,获得粒径分布信息,所述粒径分布信息包括粒径大小以及颗粒数量。
14.可选的,所述降采样包括:在所述三维点云坐标区域内,创建多个体素栅格,所述体素栅格的尺寸小于三维相机的分辨率;
15.计算每一个体素栅格内所有点云坐标的中心坐标;
16.利用体素栅格的中心坐标替换体素栅格中所有点云坐标,生成降采样点云坐标。
17.可选的,所述剔除离群点包括:遍历所述降采样点云坐标,选取任一点云坐标作为当前点,并判断当前点与最近k2个领域点的平均距离,计算平均距离的均值和标准差,并获取比例系数,所述比例系数为常数;
18.根据平均距离的均值和标准差,以及比例系数,确定距离阈值;
19.若平均距离大于距离阈值,则删除当前点,获得剔除离群点的点云坐标。
20.可选的,所述修复缺失点包括:获取三维相机的分辨率和间距变化系数,并根据三维相机的分辨率和间距变化系数,计算缺失点阈值;
21.遍历剔除离群点的点云坐标,计算任意相邻点间的距离;
22.判断任意相邻点间的距离与缺失点阈值的大小,若所述任意相邻点间的距离大于所述缺失点阈值,则在所述相邻点间进行局部范围曲面拟合,添加缺失点,获得滤波点云坐标。
23.可选的,在添加缺失点的步骤之后,还包括:计算缺失点的相邻点与所述缺失点之间的距离;
24.判断缺失点的相邻点与所述缺失点之间的距离与缺失点阈值的大小,若缺失点的相邻点与所述缺失点之间的距离大于缺失点阈值,则在缺失点的相邻点与所述缺失点之间进行局部范围曲面拟合,添加新的缺失点。
25.可选的,所述体素栅格的尺寸为0.2mm。
26.可选的,所述间距变化系数为2。
27.可选的,所述对所述目标区域点云坐标进行颗粒分割处理,获得单个颗粒点云坐标的步骤包括:
28.遍历目标区域点云坐标,采用kd树搜索每个点云的k3个领域点,通过每个点云的k3个领域点就算每个点云的法线和曲率;
29.根据所述法线和所述曲率,以及利用所述区域生长法对所述目标区域点云坐标进行颗粒分割,获得单个颗粒点云坐标。
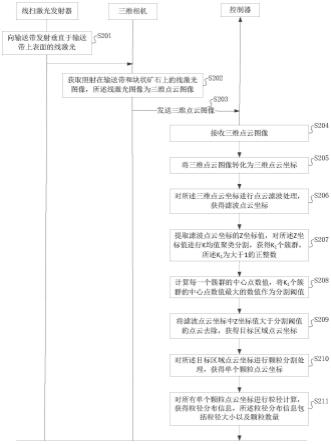
30.本技术实施例另一方面提供一种基于3d云图的矿石块度智能识别系统,包括控制器,以及连接所述控制器的线扫激光发射器和三维相机;
31.所述线扫激光发射器和三维相机设置在输送带的正上方,所述输送带用于输送块状矿石,所述线扫激光发射器用于向输送带发射垂直于输送带上表面的线激光;所述3d相机用于获取照射在输送带和块状矿石上的线激光图像,所述线激光图像为三维点云图像;
32.所述控制器还被配置为执行以下步骤:
33.通过线扫激光发射器和三维相机获取矿石颗粒的三维点云图像,并将三维点云图像转化为三维点云坐标;
34.对所述三维点云坐标进行点云滤波处理,获得滤波点云坐标,所述滤波处理包括
降采样、剔除离群点和修复缺失点;
35.提取滤波点云坐标的z坐标值,对所述z坐标值进行k均值聚类分割,获得k1个簇群,所述k1为大于2的正整数;
36.计算每一个簇群的中心点数值,将k1个簇群的中心点数值最大的数值作为分割阈值;
37.将滤波点云坐标中z坐标值大于分割阈值的点云去除,获得目标区域点云坐标;
38.对所述目标区域点云坐标进行颗粒分割处理,获得单个颗粒点云坐标,所述颗粒分割处理包括超体素区域聚类、区域凹凸性标记和区域颗粒聚类;
39.对所有单个颗粒点云坐标进行粒径计算,获得粒径分布信息,所述粒径分布信息包括粒径大小以及颗粒数量。
40.可选的,其特征在于,所述三维相机的像素为500万,分辨率为0.3mm。
41.由以上方案可知,本技术提供一种基于3d云图的矿石块度智能识别方法及系统,所述一种基于3d云图的矿石块度智能识别系统,包括控制器,以及连接所述控制器的线扫激光发射器和三维相机。所述线扫激光发射器和三维相机设置在输送带的正上方,所述输送带用于输送块状矿石,所述线扫激光发射器用于向输送带发射垂直于输送带上表面的线激光;所述3d相机为3d工业相机,像素为500万,分辨率为0.3mm,用于获取照射在输送带和块状矿石上的线激光图像,所述线激光图像为三维点云图像。
42.在实际应用过程中,所述控制器用于执行一种基于3d云图的矿石块度智能识别方法,通过线扫激光发射器和三维相机获取矿石颗粒的三维点云图像,并将三维点云图像转化为三维点云坐标;对所述三维点云坐标进行点云滤波处理,获得滤波点云坐标,所述滤波处理包括降采样、剔除离群点和修复缺失点;提取滤波点云坐标的z坐标值,对所述z坐标值进行k均值聚类分割,获得k1个簇群,所述k1为大于1的正整数;计算每一个簇群的中心点数值,将k1个簇群的中心点数值最大的数值作为分割阈值;将滤波点云坐标中z坐标值大于分割阈值的点云去除,获得目标区域点云坐标;对所述目标区域点云坐标进行颗粒分割处理,获得单个颗粒点云坐标;对所有单个颗粒点云坐标进行粒径计算,获得粒径分布信息,所述粒径分布信息包括粒径大小以及颗粒数量。
附图说明
43.为了更清楚地说明本技术的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,对于本领域普通技术人员而言,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
44.图1为本技术实施例提供的一种基于3d云图的矿石块度智能识别系统整体结构示意图;
45.图2为本技术实施例提供的一种种基于3d云图的矿石块度智能识别方法流程示意图;
46.图3为本技术实施例提供的三维点云坐标的降采样流程示意图;
47.图4为本技术实施例提供的降采样点云坐标的剔除离群点流程示意图;
48.图5为本技术实施例提供的剔除离群点的点云坐标的修复缺失点流程示意图;
49.图6为本技术实施例提供的矿石粒径统计图。
具体实施方式
50.为了能够精准识别烧结技术领域矿石的粒度大小及分布,本技术提供一种基于3d云图的矿石块度智能识别方法及系统。
51.如图1所示,为申请实施例提供的一种基于3d云图的矿石块度智能识别系统整体结构示意图,本技术实施例第一方面提供一种基于3d云图的矿石块度智能识别系统,包括控制器1,以及连接所述控制器1的线扫激光发射器2和三维相机3。
52.所述线扫激光发射器2和三维相机3设置在输送带4的正上方,所述输送带4用于输送块状矿石,所述线扫激光发射器2用于向输送带发射垂直于输送带上表面的线激光;所述3d相机3为3d工业相机,像素为500万,分辨率为0.3mm,用于获取照射在输送带和块状矿石上的线激光图像,所述线激光图像为三维点云图像。
53.所述控制器1还被配置为执行本技术第二方面提供的一种基于3d云图的矿石块度智能识别方法,如图2所示,为本技术实施例提供的一种种基于3d云图的矿石块度智能识别方法流程示意图,所述矿石块度智能识别方法包括步骤s201至步骤s211。
54.所述控制器1通过线扫激光发射器和三维相机获取矿石颗粒的三维点云图像,并将三维点云图像转化为三维点云坐标,具体过程为步骤s201至步骤s205.
55.步骤s201,向输送带发射垂直于输送带上表面的线激光。
56.步骤s202,获取照射在输送带和块状矿石上的线激光图像,所述线激光图像为三维点云图像。
57.通过线扫激光发射器2向输送带4发射垂直于输送带上表面的线激光,并通过所述三维相机3拍摄照射在输送带4和块状矿石上的线激光图像,随着所述输送带4的运动,所述三维相机3可以获得输送带4和块状矿石完整的三维点云图像。
58.步骤s203,发送三维点云图像。
59.步骤s204,接收三维点云图像。
60.步骤s205,将三维点云图像转化为三维点云坐标。
61.所述控制器1接收所述三维相机3发送的三维点云图像,并将所述三维点云图像转化为三维点云坐标,即可由控制器直接进行运算处理的(x,y,z)格式的点云。
62.步骤s206,对所述三维点云坐标进行点云滤波处理,获得滤波点云坐标。
63.其中,所述滤波处理包括降采样、剔除离群点和修复缺失点。
64.如图3所示,本技术实施例提供的三维点云坐标的降采样流程示意图。。
65.步骤s301,在所述三维点云坐标区域内,创建多个体素栅格,所述体素栅格的尺寸小于三维相机的分辨率。
66.即将所述三维点云坐标区域划分为多个小方格,每一个小方格的边长需要小于所述三维相机3的分辨率,本技术实施例中,将所述体素栅格的边长尺寸设置为0.2mm。
67.步骤s302,计算每一个体素栅格内所有点云坐标的中心坐标。
68.步骤s303,利用体素栅格的中心坐标替换体素栅格中所有点云坐标,生成降采样点云坐标。
69.对每一个体素栅格内的所有点云坐标进行统计,计算出一个体素栅格区域的中心坐标。并用获得的中心坐标,代替整个体素栅格区域所有的点云坐标,通过降采样的方式,可以在不改变矿石特性的情况下,减少三维点云坐标区域的点运量,从而减轻后续处理的
运算量。
70.如图4所示,本技术实施例提供的降采样点云坐标的剔除离群点流程示意图。
71.步骤s401,遍历所述降采样点云坐标,选取任一点云坐标作为当前点,并判断当前点与最近k2个领域点的平均距离,计算平均距离的均值和标准差,并获取比例系数。
72.其中,所述比例系数为常数,例如0.5或1,用于控制剔除点云的程度,所述比例系数越小,剔除的点云量越大,可以根据实际工程需求进行设置。
73.步骤s402,根据平均距离的均值和标准差,以及比例系数,确定距离阈值。
74.所述距离阈值根据以下模型确定:
75.d1=u s
×
a1
76.其中,d1为距离阈值,u为平均距离的均值,s为平均距离的标准差s,a1为比例系数。
77.步骤s403,判断平均距离是否大于距离阈值。
78.步骤s404,若平均距离大于距离阈值,则删除当前点,获得剔除离群点的点云坐标。
79.若平均距离大于距离阈值小于或者等于距离阈值,则返回步骤s401,继续选取任一点云坐标作为当前点,直至所述遍历完所有降采样点云坐标区域的点云,循环过程结束。采用剔除离群点对所述降采样点云坐标进行统计滤波,通过查询点云与相邻点之间的距离过滤噪声点云和离群点云,获得剔除离群点的点云坐标。
80.如图5所示,本技术实施例提供的剔除离群点的点云坐标的修复缺失点流程示意图。
81.步骤s501,获取三维相机的分辨率和间距变化系数,并根据三维相机的分辨率和间距变化系数,计算缺失点阈值。
82.所述缺失点阈值为a2
×
c,其中,a2为间距变化系数,c为三维相机的分辨率,其中,在本技术实施例中,所述间距变化系数a2=2。
83.步骤s502,遍历剔除离群点的点云坐标,计算任意相邻点间的距离。
84.步骤s503,判断任意相邻点间的距离与缺失点阈值的大小,若所述任意相邻点间的距离大于所述缺失点阈值,则在所述相邻点间进行局部范围曲面拟合,添加缺失点,获得滤波点云坐标。
85.即,当任意相邻点间的距离大于两倍的三维相机的分辨率时,则表示两个相邻点间存在缺失点,并通过局部范围曲面拟合,添加缺失点,需要说明的是,当两个相邻点间存在缺失点,可能缺失点的数量不止一个,故在添加缺失点后,会对添加的缺失点进行二次修复处理。所述二次修复处理包括:计算缺失点的相邻点与所述缺失点之间的距离d2;判断缺失点的相邻点与所述缺失点之间的距离d2与缺失点阈值a2
×
c的大小,若缺失点的相邻点与所述缺失点之间的距离大于缺失点阈值d2》a2
×
c,则在缺失点的相邻点与所述缺失点之间进行局部范围曲面拟合,添加新的缺失点。
86.在获得所述滤波点云坐标,由于所述三维相机3获取的图像中,不可避免的会获取到输送带4的上表面,为了去除所述输送带4的图像干扰,需要将所述输送带4的点云数据从所述滤波点云坐标中去除,去除过程为步骤s207至步骤s209。
87.由于线扫激光发射器2和三维相机3获取的数据中包含传送带表面的点云,因此在
进行颗粒分割之前,需要将矿石的区域和输送带4的区域进行分割,分割方法为步骤s207至步骤s209。
88.步骤s207,提取滤波点云坐标的z坐标值,对所述z坐标值进行k均值聚类分割,获得k1个簇群,k1为大于1的正整数。
89.由于块状矿石处于所述输送带4上表面,故只需要保证簇群的数量大于1,即至少2个簇群,即可将所述输送带4的点云去除,但是k1值越小,去除的点云中包括块状矿石的点云就越多,故一般将k1的值设置的较大,但是k1设置较大,会导致运算量加大,实际工程中,会根据工程需要设置相对合理的数值。
90.步骤s208,计算每一个簇群的中心点数值,将k1个簇群的中心点数值最大的数值作为分割阈值。
91.其中,中心点数值最大的簇群,即为包含了输送带4图像点云的簇群,故将中心点数值最大的数值作为分割阈值。
92.步骤s209,将滤波点云坐标中z坐标值大于分割阈值的点云去除,获得目标区域点云坐标。
93.通过将所述滤波点云坐标中z坐标值大于分割阈值的点云去除,保证可以将输送带4的图像点云去除,但是不局限于,这种去除z坐标值大于分割阈值的点云,在精度要求不高的情况下,还可以考虑直接去除中心点数值最大的簇群,通过去除整个簇群,也可以实现去除输送带4的图像点云,这种方式可以保证数据运算量更小,有利于提高所述矿石块度智能识别方法的识别速度。
94.步骤s210,对所述目标区域点云坐标进行颗粒分割处理,获得单个颗粒点云坐标。
95.所述对所述目标区域点云坐标进行颗粒分割处理,获得单个颗粒点云坐标的步骤包括:
96.遍历目标区域点云坐标,采用kd树搜索每个点云的k3个领域点,通过每个点云的k3个领域点就算每个点云的法线和曲率。
97.根据所述法线和所述曲率,以及利用所述区域生长法对所述目标区域点云坐标进行颗粒分割,获得单个颗粒点云坐标。
98.根据每个点云的法线和曲率,采用区域生长算法对单个颗粒进行聚类分割,具体流程如下:
99.步骤一:确定初始点云、总聚类簇群、角度阈值,曲率阈值。
100.其中,所述初始点云为所述目标区域点云坐标,所述总聚类簇群初始状态为一个空的簇群,所述角度阈值和曲率阈值由实际工况生产的块状矿石的凹凸性确定,本技术实施例中提供的角度阈值为11度,曲率阈值为0.1。
101.步骤二:生成一个空的当前种子群,从初始点云中选择曲率最小的点作为初始生长点,并加入到当前种子群中,同时将该点从初始点云中移除。
102.步骤三:遍历当前种子群,移出一个种子点作为当前种子点。
103.步骤四:采用kd树搜索当前种子点的k3个邻域点。
104.步骤五:遍历k3个邻域点,并计算当前邻域点与当前种子点法线的夹角,如果当前邻域点与当前种子点法线的夹角小于设定的角度阈值,则将当前邻域点添加到当前聚类簇群中,并将当前邻域点从初始点云中移除;然后,判断当前邻域点的曲率大小,如果曲率小
于设定的曲率阈值,将该邻域点作为新生种子点添加到当前种子群中。当遍历完k3个邻域点后,返回步骤三,直到当前种子群为空,此时将当前聚类簇群添加到总聚类簇群中。
105.步骤六:重新执行步骤二至步骤五,直到初始点云为空后,终止区域生长,返回聚类的结果。
106.步骤s211,对所有单个颗粒点云坐标进行粒径计算,获得粒径分布信息,所述粒径分布信息包括粒径大小以及颗粒数量。
107.其中,所述颗粒数量可以直接对分割完成的单个颗粒点坐标进行数量统计,为了获得单个颗粒点云的粒径大小,本技术实施例利用以下模型,采用最小外接球拟合方法计算颗粒的粒径大小。
108.r2=∑((x
i-xc)2 (y
i-yc)2 (z
i-zc)2)/n
109.其中,(xi,yi,zi)为颗粒点云的边缘点,(xc,yc,zc)为拟合球的球心,n为点云个数,r为拟合球的半径。
110.为了能够直观的了解块状矿石的粒径大小,以及粒径分布,可以将所述粒径分布信息制作成图表形式,例如,如图6所示,为本技术实施例提供的矿石粒径统计图,并设置显示器进行展示,从而能够直观清楚的了解到输送带4上矿石的粒径分布。
111.由以上方案可知,本技术实施例提供一种基于3d云图的矿石块度智能识别方法及系统,所述一种基于3d云图的矿石块度智能识别系统,包括控制器1,以及连接所述控制器1的线扫激光发射器2和三维相机3。所述线扫激光发射器2和三维相机3设置在输送带4的正上方,所述输送带4用于输送块状矿石,所述线扫激光发射器2用于向输送带发射垂直于输送带上表面的线激光;所述3d相机3为3d工业相机,像素为500万,分辨率为0.3mm,用于获取照射在输送带和块状矿石上的线激光图像,所述线激光图像为三维点云图像。
112.在实际应用过程中,所述控制器1用于执行一种基于3d云图的矿石块度智能识别方法,通过线扫激光发射器2和三维相机3获取矿石颗粒的三维点云图像,并将三维点云图像转化为三维点云坐标;对所述三维点云坐标进行点云滤波处理,获得滤波点云坐标,所述滤波处理包括降采样、剔除离群点和修复缺失点;提取滤波点云坐标的z坐标值,对所述z坐标值进行k均值聚类分割,获得k1个簇群,所述k1为大于1的正整数;计算每一个簇群的中心点数值,将k1个簇群的中心点数值最大的数值作为分割阈值;将滤波点云坐标中z坐标值大于分割阈值的点云去除,获得目标区域点云坐标;对所述目标区域点云坐标进行颗粒分割处理,获得单个颗粒点云坐标;对所有单个颗粒点云坐标进行粒径计算,获得粒径分布信息,所述粒径分布信息包括粒径大小以及颗粒数量。
113.以上结合具体实施方式和范例性实例对本技术进行了详细说明,不过这些说明并不能理解为对本技术的限制。本领域技术人员理解,在不偏离本技术精神和范围的情况下,可以对本技术技术方案及其实施方式进行多种等价替换、修饰或改进,这些均落入本技术的范围内。本技术的保护范围以所附权利要求为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。