技术特征:
1.一种作业支援服务器,用于支援由操作者进行的使用了远程操作装置的作业机械的远程操作,其特征在于,具备:第1支援处理元件,基于与所述远程操作装置的通信,将与通过拍摄装置获取的作业现场的拍摄图像对应的作业现场俯瞰图像输出至所述远程操作装置的输出接口,识别所述远程操作装置的操作对象即作为所述作业机械的协作作业机械的实际空间位置,所述作业现场俯瞰图像中映入有作业机械的情况下,根据该作业机械的图像坐标系中的位置及所述协作作业机械的实际空间位置,判定所述作业机械是否属于所述协作作业机械;第2支援处理元件,在由所述第1支援处理元件判定为所述作业机械属于所述协作作业机械的情况下,基于与所述远程操作装置的通信,将示出映入所述作业现场俯瞰图像的所述作业机械属于协作作业机械的第1标识图像输出至所述远程操作装置的输出接口。2.如权利要求1所述的作业支援服务器,其特征在于,在由所述第1运算处理元件判定为属于所述协作作业机械的一个作业机械映入所述作业现场俯瞰图像的情况下,映入所述作业现场俯瞰图像的作业机械的数量越多,所述第2支援处理元件将所述第1标识图像越为强调地输出至所述远程操作装置的输出接口。3.如权利要求1或2述的作业支援服务器,其特征在于,在所述作业现场俯瞰图像中映入有包括所述协作作业机械在内的多个作业机械的情况下,所述作业现场俯瞰图像中的所述协作作业机械及其他作业机械的间隔越小,所述第2支援处理元件将所述第1标识图像越强调输出至所述远程操作装置的输出接口。4.如权利要求1~3的任一项所述的作业支援服务器,其特征在于,在由所述第1支援处理元件判定为所述作业机械不属于所述协作作业机械的情况下,所述第2支援处理元件基于与所述远程操作装置的通信,将表示所述作业机械不属于协作作业机械的第2标识图像以使该第2标识图像能与所述第1标识图像识别开的方式输出至所述远程操作装置的输出接口。5.如权利要求1~4的任一项所述的作业支援服务器,其特征在于,所述第1支援处理装置识别所述协作作业机械的实际空间位置及实际空间姿势中的至少一个的时间序列,所述第2支援处理元件基于与所述远程操作装置的通信,将表示由所述第1支援处理元件识别而得的所述协作作业机械的实际空间位置及实际空间姿势中的至少一方的时间序列的轨道图像作为所述第1标识图像而输出至所述远程操作装置的输出接口。6.如权利要求1~5的任一项所述的作业支援服务器,其特征在于,所述第2支援处理元件基于与所述远程操作装置的通信,将表示所述作业机械的实际空间位置和所述拍摄装置的实际空间位置及视角的地图或俯瞰作业现场俯瞰图像输出至所述远程操作装置的输出接口。7.一种作业支援系统,其特征在于,由权利要求1~6的任一项所述的作业支援服务器与所述远程操作装置构成。8.一种作业支援方法,用于支援由操作者进行的使用了远程操作装置的作业机械的远程操作,其特征在于,执行:第1支援处理,基于与所述远程操作装置的通信,将与通过拍摄装置获取的作业现场的拍摄图像对应的作业现场俯瞰图像输出至所述远程操作装置的输出接口,识别所述远程操
作装置的操作对象即作为所述作业机械的协作作业机械的实际空间位置,所述作业现场俯瞰图像中映入有作业机械的情况下,根据该作业机械的图像坐标系中的位置及所述协作作业机械的实际空间位置,判定所述作业机械是否属于所述协作作业机械;第2支援处理,在由所述第1支援处理判定为所述作业机械属于所述协作作业机械的情况下,基于与所述远程操作装置的通信,将示出映入所述作业现场俯瞰图像的所述作业机械属于协作作业机械的第1标识图像输出至所述远程操作装置的输出接口。
技术总结
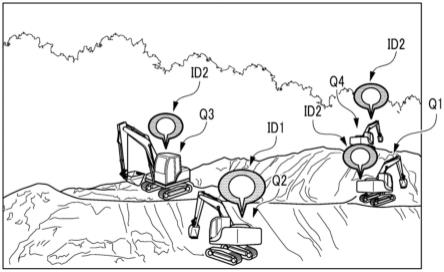
本发明涉及能够支援操作者来识别映入输出至构成远程操作装置的输出接口的作业现场俯瞰图像的作业机械是否为该远程操作装置的远程操作对象的服务器及系统。根据由拍摄装置(C)获取的拍摄图像,在输出至构成远程操作装置(20)的输出接口(220)的作业现场俯瞰图像中映入有作业机械40的情况下,判定该作业机械(40)是否属于协作作业机械。并且,在该结果为肯定的情况下,将与表示映入作业现场俯瞰图像的作业机械(40)的实机图像(Q2)相关联的第1标识图像(ID1)显示在远程操作装置(20)的输出接口(220)。口(220)。口(220)。
技术研发人员:佐佐木均 山崎洋一郎
受保护的技术使用者:神钢建机株式会社
技术研发日:2020.10.08
技术公布日:2022/7/13
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。