一种基于aadl的智能体与面向服务的体系结构建模方法
技术领域
1.本发明涉及航空电子系统建模技术领域,更具体的说是涉及一种基于aadl的智能体与面向服务的体系结构建模方法。
背景技术:
2.航空电子系统涉及通信、导航、识别、探测、飞行管理、显示控制等功能,以便为飞行员提供全面准确的战场态势信息,以增强飞行员对战场环境中潜在威胁进行识别、监控、分析和反应的能力,是整个战机的中枢神经。航空电子的发展经历了分立式、联合式、综合式以及分布式几个阶段,旨在增强航空电子系统功能、性能,降低飞机生命周期费用的同时,解决系统软硬件的升级移植问题。
3.随着当前航空领域和信息领域的相关技术不断发展,人工智能与信息化技术成为当前航空领域研究重点关注的对象。并且在关于未来战斗机发展的讨论中多次强调了信息化与智能化的重要性,包括:
4.战斗机的机械化是信息化的前提,而信息化又是智能化的基础(杨伟.关于未来战斗机发展的若干讨论.航空学报2020;41(06):8
–
19.);
5.自主与人工智能技术是实现复杂空战系统的必要条件(孙聪.从空战制胜机理演变看未来战斗机发展趋势.航空学报2021;42(08):8
–
20.)等;
6.航空电子系统中软件体系结构和人工智能技术作为信息化的重要部分,是航空电子系统功能的重要基础。因此,人工智能技术与面向服务的体系结构(service-oriented architecture,soa)在航空电子系统中的应用成为了先进航电系统体系架构的研究重点。
7.但随着技术发展航空电子系统规模不断增加,系统设计工作也越发复杂,使得建模为设计成为工作中的重点,目前,如何更好的对智能体与soa进行更好的建模是研究中需要面临的重要问题。
8.对于智能体,是指航空电子系统中的智能体软件,可以与外界环境交互并进行自主活动,具体的,可将其定义为:智能是软件实体,可以代表用户或者有一定的独立或者自治权的计划进行一组操作,在复杂的动态的环境的计算系统环境里感受和自动地执行任务,如此可以实现他们所设计的一套目标(maes p.agents that reduce work and infomation overload.coomunications acm 1994;37.)。同时,智能体也是一个满足特定设计需要的计算机(硬件或软件)系统,它位于特定的环境当中,具有高度的灵活性和自治性(jennings n.r.,faratin p.,johnson m.j.,norman t.j.,wiegand m.e.agent-based business process management.int j coop inf syst 1996;5(2
–
3):105
–
30.doi:10.1142/s0218843096000051.wooldridge michael,jennings nicholas r.intelligent agents:theory and practice.knowl eng rev 1995;10(2):115
–
52.doi:10.1017/s0269888900008122.)。
9.而对于面向服务的体系结构(soa),其代表了一个开放、敏捷、可扩展、可联合和可组合的架构,包含自制的、高服务质量的、厂商多样性的、可互操作的、可发现的和潜在可复
用的服务,虽然目前soa还没有公认的标准定义,但是业界已经有了一些对于soa的定义:
10.万维网联盟(the worldwide web consortium,w3c)对soa的定义是:“一种应用程序体系结构,在这种体系结构中,所有功能都定义为独立的服务,这些服务带有定义明确的可调用接口,可以以定义好的顺序调用这些服务来形成业务流程”;
11.service-architecture.com对soa的定义是:“本质上是服务的集合。服务间彼此通信,这种通信可能是简单的数据传送,也可能是两个或更多的服务协调进行某些活动。服务间需要某些方法进行连接。所谓服务就是精确定义、封装完善、独立于其他服务所处环境和状态的函数。”12.针对智能体建模方法,目前有较多的研究,包括根据功能将智能体划分为几种典型智能体并对其功能进行介绍,通过对功能划分实现对智能系统的整体功能建模,基于离散事件系统(devs)的建模方法,具体通过对智能体的状态分为感知、认知和行动三类,通过三类状态函数对智能体进行描述,以及将智能体定义为一个映射,把智能体感知的局部环境内容映射为一般的行为企图,而不是具体的行动,智能体在感知环境后对某行为的企图会进行调整,可以实现潜在行为的平稳转换,其行为逻辑也更加丰富。
13.在当前的soa研究与项目实践中,也已经有一些现有方法被应用到soa建模中,如ooad、bpm等建模方法,
14.虽然以上建模方法研究都取得了一些进展,但是针对智能体与soa的特定建模方法仍然不够深入,如无法描述智能体在外界环境输入下的自主反馈与行为,soa建模方法中无法兼顾对单个应用实现的描述和对服务整体业务架构的描述等。
15.因此,如何提供一种基于aadl的智能体与面向服务的体系结构建模方法是本领域技术人员亟需解决的问题。
技术实现要素:
16.有鉴于此,本发明提供了一种基于aadl的智能体与面向服务的体系结构建模方法,实现了对单个应用和服务整体业务架构的描述,以及对智能体在外界环境输入下的自主反馈与行为的描述,
17.为了实现上述目的,本发明公开的基于aadl的智能体与面向服务的体系结构建模方法,通过如下步骤实现:
18.s1、分析智能体与面向服务的体系结构的特性信息,整理建模所需元素:
19.将智能体的行为划分为不同的状态,确定各状态下的智能体特性信息,确定引起智能体行为变化的元素;
20.确定面向服务的体系结构的业务与服务种类;确定各业务中服务的配置情况及业务请求;
21.s2、根据所述特性信息,确定建模需要的aadl组件,确定所需的建模方法:所述aadl组件包括模式组件和系统组件,
22.利用模式组件描述智能体软件工作状态,通过智能体软件输入所述引起智能体行为变化的元素触发工作状态转换;
23.利用系统组件结合模式组件描述面向服务的体系结构的业务,通过所述业务请求触发当前业务向其他业务转换。
24.优选的,s1中,所述分析智能体与面向服务的体系结构的特性信息,还需要确定智能体与面向服务的体系结构中其他部分元素,包括线程和数据;
25.优选的,s2中,所述系统组件包括不同进程组件,所述进程组件表示不同的服务。
26.优选的,所述s2中,利用模式组件进行智能体建模的过程包括如下步骤:
27.s211、建立进程组件表示智能体进程;
28.s212、在所述进程组件中建立多个模式,用于描述智能体的各项行为,通过设定模式转换的触发器描述智能体行为的变化方式;
29.s213、为所述进程组件添加属性,用于描述智能体在不同行为中的属性特点;
30.s214、在所述进程组件中添加其他组件如线程、数据和连接关系,形成完整模型。
31.优选的,所述s2中,利用系统组件结合模式组件进行面向服务的体系结构建模的过程,包括如下步骤:
32.s221、建立总系统组件,用于表示面向服务体系结构整体;
33.s222、在所述总系统组件中建立多个模式,并创建与所述多个模式对应的系统组件,用于描述面向服务体系结构的各项业务,通过模式的转换条件描述系统可处理的各项业务请求;
34.s223、在系统组件中添加进程组件,用于描述业务内部调用的各项服务,通过设定模式转换的触发器描述面向服务体系结构业务的转换和对服务的调用;
35.s224、为所述系统组件和所述进程组件添加详细配置和属性信息,用于描述面向服务体系结构中系统执行不同业务时,系统与不同服务的属性特点;
36.s225、在所述系统组件和所述进程组件中添加其他组件,包括线程、数据和接口,形成完整模型。
37.优选的,本发明中利用osate建模软件将所述建模模型进行实现。
38.经由上述的技术方案可知,与现有技术相比,其有益效果在于,充分考虑aadl的优点,将其应用于智能体和面向服务的体系结构的设计中,简化了越发复杂的系统的设计,并且实现了对单个应用和服务整体业务架构的描述,以及对智能体在外界环境输入下的自主反馈与行为的描述。
附图说明
39.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
40.图1附图为本发明提供的智能体实例建模示意图;
41.图2附图为本发明提供的面向服务的体系结构的工作方式示意图;
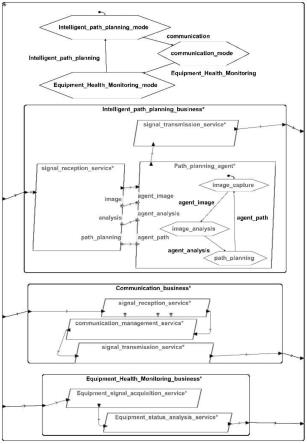
42.图3附图为本发明提供的具体实例中智能体与面向服务的体系结构整体模型的图形化模型示意图。
具体实施方式
43.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完
整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
44.aadl是一种框架语言,它并不关心具体功能的实现,而只对非功能属性进行约束。系统设计者可以对建立的系统模型的可靠性、安全性、实时性等进行各种分析和测评,以此不断改进系统设计。
45.相应的,模型驱动结构方法(model driven architecture)是由omg提出的一种很有应用前景的基于抽象模型的软件开发方法。众所周知,软件开发中的绝大部分错误是在需求分析和规格的早期阶段引入的,这些错误将随着开发的深入逐渐放大。错误被发现得越晚,对其进行修改所需付出的代价也越大。使用mda软件开发方法,系统设计者可以在模型设计阶段对系统模型进行充分的分析验证,将可能存在的大部分错误解决,而aadl(架构分析与设计语言),是一种符合mda思想的体系结构建模语言。
46.使用aadl进行嵌入式软件的设计开发,能够在保证嵌入式软件的各项功能及非功能属性被满足的情况下,简化软件开发过程、提高软件开发效率、减少编码错误的产生、降低开发成本。
47.因此本发明实施例公开了一种基于aadl的智能体与面向服务的体系结构建模方法,具体包括如下步骤:
48.s1、分析智能体与面向服务的体系结构的特性信息,整理建模所需元素:
49.将智能体的行为划分为不同的状态,确定各状态下的智能体特性信息,确定引起智能体行为变化的元素,包括特定事件、数据等,最后确定智能体其它部分的元素:如线程、数据等部;
50.确定面向服务的体系结构的核心组件,包括业务与服务,具体的参见表一,
51.表一 建模所需核心组件
[0052][0053]
其次需要确定各业务中服务的配置情况及业务请求;以及各个业务中服务的配置情况、可处理的各项业务请求;最后确定面向服务的体系结构中其他部分等内容,如线程、数据。
[0054]
s2、根据步骤一中确定的特性信息,确定建模需要的aadl组件,并结合aadl组件与特性信息确定具体的建模方法;所述aadl组件包括模式组件和系统组件,
[0055]
利用模式组件描述智能体软件工作状态,通过智能体软件输入所述引起智能体行为变化的元素触发工作状态转换;
[0056]
利用系统组件结合模式组件描述面向服务的体系结构的业务,通过所述业务请求触发当前业务向其他业务转换,其中,系统组件包括不同进程组件,进程组件表示不同的服务。
[0057]
具体的,利用模式组件进行智能体建模的过程包括如下步骤,(如图1):
[0058]
s211、建立进程组件表示智能体进程;
[0059]
s212、在所述进程组件中建立多个模式,用于描述智能体的各项行为,通过设定模式转换的触发器描述智能体行为的变化方式;
[0060]
建模中,模式组件中设定的trigger,也可以叫模式转换的触发器,可以是事件、数据、消息等元素,之前设定的接口接收了设定的内容,就会触发模式a转换为模式b;
[0061]
s213、为所述进程组件添加属性,用于描述智能体在不同行为中的属性特点;
[0062]
s214、在所述进程组件中添加其他组件如线程、数据和连接关系,形成完整模型。
[0063]
进一步地,利用系统组件结合模式组件进行面向服务的体系结构建模的过程,包括如下步骤:如图2:
[0064]
s221、建立总系统组件,用于表示面向服务体系结构整体;
[0065]
s222、在所述总系统组件中建立多个模式,并创建与所述多个模式对应的系统组件,用于描述面向服务体系结构的各项业务,通过模式的转换条件描述系统可处理的各项业务请求;
[0066]
s223、在系统组件中添加进程组件,进程组件代表全部的软件服务,可以是智能体,也可以不是智能体,用于描述业务内部调用的各项服务与服务的配置关系,通过设定模式转换的触发器描述面向服务体系结构业务的转换和对服务的调用;
[0067]
s224、为所述系统组件和所述进程组件添加详细配置和属性信息,用于描述面向服务体系结构中系统执行不同业务时,系统与不同服务的属性特点;
[0068]
s225、在所述系统组件和所述进程组件中添加其他组件,如线程、数据和接口,形成完整模型。
[0069]
在确定建模实例时,可根据系统设计文档等内容,确定实例的目标详细信息;根据实例信息,明确智能体与面向服务的体系结构的建模细节。
[0070]
下面以某航电系统中部分功能作为案例,完成基于aadl的包含智能体的面向服务的体系结构建模。此案例中包含三项业务:智能路径规划、通讯与设备健康状态监测,包含五项服务:路径规划服务、通信管理服务、信号接收服务、信号发送服务、设备信号采集服务与设备状态分析服务。其中业务与服务的对应关系如下:智能路径规划业务包含:智能路径规划服务、信号接收服务与信号发送服务;通讯业务包含通信管理服务、信号接收服务与信号发送服务;设备健康状态监测业务包含设备信号采集服务与设备状态分析服务。
[0071]
其中路径规划服务包含智能体,采用智能体建模方法对这一服务进行建模。根据此智能体的特点将其状态划分为图像采集、图像分析、路径规划三个状态,智能体服务在三个状态下具有不同的执行时间属性,通过路径规划任务事件、采集图像数据与图像分析结果数据触发其状态转换。
[0072]
最后,利用osate建模软件将所述建模模型进行实现。
[0073]
继续以上述某航电系统中部分功能作为案例,采用面向服务的体系结构建模方法,对此系统进行建模。首先采用system组件描述整体面向服务的体系结构,并在该结构中建立多个模式对应智能路径规划、通讯与设备健康状态监测三项业务,并在结构内部建立多个system组件描述系统中的三项业务,在各项业务内部采用process组件描述业务中包含的各项服务。通过对应的智能路径规划、通讯与设备健康状态监测三项业务请求作为密保事件触发系统的业务转换。
[0074]
采用智能体建模方法对路径规划服务进行建模,首先采用process组件描述路径
规划服务,在process组件建立多个模式对应图像采集、图像分析、路径规划三个状态,然后路径规划任务事件、采集图像数据与图像分析结果数据触发其状态转换,最后设置process组件在三个状态下具有不同的执行时间属性。
[0075]
osate建模详细内容如下:
[0076]
1.采用图形化模型直观的表现系统架构与组件配置信息,如图3所示;
[0077]
2.采用面向服务的体系结构建模方法,对系统进行建模,具体实现的文本模型如下:
[0078]
system implementation aifs.impl
[0079]
subcomponents
[0080]
intelligent_path_planning_business:system
[0081]
intelligent_path_planning_business.impl in modes
[0082]
(intelligent_path_planning_mode);
[0083]
communication_business:system communication_business.impl in modes(equipment_health_monitoring_mode);
[0084]
equipment_health_monitoring_business:system
[0085]
equipment_health_monitoring.impl in modes(communication_mode);
[0086]
connections
[0087]
aifs_impl_new_connection:feature i_1-》
[0088]
intelligent_path_planning_business.mode1_system_new_feature;
[0089]
aifs_impl_new_connection2:feature
[0090]
intelligent_path_planning_business.mode1_system_new_feature2-》o_2;
[0091]
aifs_impl_new_connection3:feature i_2-》
[0092]
communication_business.mode2_system_new_feature;
[0093]
aifs_impl_new_connection4:feature
[0094]
communication_business.mode2_system_new_feature2-》o_3;
[0095]
aifs_impl_new_connection5:feature i_3-》
[0096]
equipment_health_monitoring_business.mode3_system_new_feature;
[0097]
aifs_impl_new_connection6:feature
[0098]
equipment_health_monitoring_business.mode3_system_new_feature2-》o_1;
[0099]
modes
[0100]
intelligent_path_planning_mode:initial mode;
[0101]
equipment_health_monitoring_mode:mode;
[0102]
communication_mode:mode;
[0103]
aifs_impl_new_transition:intelligent_path_planning_mode-[communication]-》communication_mode;
[0104]
aifs_impl_new_transition2:communication_mode-[equipment_health_monitoring]-》equipment_health_monitoring_mode;
[0105]
aifs_impl_new_transition3:equipment_health_monitoring_mode-[intelligent_path_planning]-》intelligent_path_planning_mode;
[0106]
end aifs.impl;
[0107]
3.采用智能体建模方法对路径规划服务进行建模的实现文本模型如下:
[0108]
system implementation intelligent_path_planning_business.impl
[0109]
subcomponents
[0110]
path_planning_agent:process path_planning_agent.impl;
[0111]
signal_reception_service:process signal_reception_service.impl;
[0112]
signal_transmission_service:process signal_transmission_service.impl;connections
[0113]
intelligent_path_planning_business_impl_new_connection:feature signal_reception_service.path_planning-》path_planning_agent.agent_path;
[0114]
intelligent_path_planning_business_impl_new_connection2:feature signal_reception_service.analysis-》path_planning_agent.agent_analysis;
[0115]
intelligent_path_planning_business_impl_new_connection3:feature signal_reception_service.image-》path_planning_agent.agent_image;
[0116]
intelligent_path_planning_business_impl_new_connection4:feature mode1_system_new_feature-》
[0117]
signal_reception_service.signal_reception_service_new_feature2;
[0118]
intelligent_path_planning_business_impl_new_connection5:feature signal_reception_service.signal_reception_service_new_feature-》
[0119]
path_planning_agent.path_planning_agent_new_feature;
[0120]
intelligent_path_planning_business_impl_new_connection6:feature path_planning_agent.path_planning_agent_new_feature2-》
[0121]
signal_transmission_service.signal_transmission_service_new_feature2;
[0122]
intelligent_path_planning_business_impl_new_connection7:feature signal_transmission_service.signal_transmission_service_new_feature-》mode1_system_new_feature2;
[0123]
end intelligent_path_planning_business.impl;
[0124]
4.利用osate建模软件进行建模,其实现文本模型如下:
[0125]
process implementationpath_planning_agent.impl
[0126]
subcomponents
[0127]
aig_impl_new_subcomponent:thread;
[0128]
modes
[0129]
image_capture:initial mode;
[0130]
image_analysis:mode;
[0131]
path_planning:mode;
[0132]
path_planning_agent_impl_new_transition:image_capture-[agent_image]-》image_analysis;
[0133]
path_planning_agent_impl_new_transition2:image_analysis-[agent_analysis]-》path_planning;
[0134]
path_planning_agent_impl_new_transition3:path_planning-[agent_path]-》image_capture;
[0135]
endpath_planning_agent.impl;
[0136]
其中,aifs.impl表示对soa系统的详细实现,文本模型中的三项业务:智能路径规划、通讯与设备健康状态监测分别对应subcomponents中的intelligent_path_planning_business、communication_business、equipment_health_monitoring_business。
[0137]
aadl模型中的三个模式即modes中的三项内容:
[0138]
第一项:intelligent_path_planning_mode:initial mode,此模式下系统处于智能路径规划业务状态中,这个模式是初始模式;
[0139]
第二项:equipment_health_monitoring_mode:mode,此模式下系统处于通讯业务状态中;
[0140]
第三项:communication_mode:mode,此模式下系统处于设备健康状态监测业务状态中。
[0141]
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的装置而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
[0142]
对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
