1.本发明涉及导航领域,尤其是涉及一种地下车库的车位导航方法。
背景技术:
2.在城市中车辆日益增多的背景下,停车成为了日常出行必须考虑的因素。随着人们出行的增加以及城市建筑的扩建,在道路上找车位无疑是十分困难的,因此人们在前往商场或者其它公共场所时往往会选择在地下车库进行停车。
3.但当车辆进入地下车库时,往往由于地下车库布置的复杂性以及较昏暗的光线,车主无法第一时间内找到合适的车位,一般都需要在地下车库中环绕一段时间并细心观察才能找到空余的车位,若是遇到车流量较大的地下车库,可能甚至要耗费大量的时间,十分不便。
技术实现要素:
4.本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种地下车库的车位导航方法。
5.本发明的目的可以通过以下技术方案来实现:
6.一种地下车库的车位导航方法,车辆所处的地下车库包括均匀设置的多个wifi信号发射器,车辆内部的用户终端可接收wifi信号,该方法包括以下步骤:
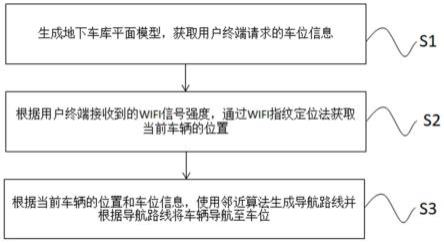
7.s1、生成地下车库平面模型,获取用户终端请求的车位信息;
8.s2、根据用户终端接收到的wifi信号强度,通过wifi指纹定位法获取当前车辆的位置;
9.s3、根据当前车辆的位置和车位信息,使用邻近算法生成导航路线并根据导航路线将车辆导航至车位;
10.车辆所处的地下车库包括均匀设置的多个wifi信号发射器。
11.进一步地,所述地下车库平面模型生成步骤如下:
12.将每个路口和车位标记为区域,将区域与区域之间的连接标记为路径,根据区域和路径生成区域连通无向图。
13.进一步地,所述步骤s3具体包括:
14.s31、使用邻近算法,获取距离当前车辆的位置最近的区域;
15.s32、使用最短路径算法计算最近的区域到车位所属区域的最短路径;
16.s33、将车辆导航至最近的区域,根据最短路径将车辆导航至车位。
17.进一步地,所述邻近算法使用最近邻算法、k近邻算法或加权k近邻算法。
18.进一步地,生成导航路线后将导航路线与地下车库信息存储于车辆用户终端中,用于下一次驶入该地下车库时直接读取。
19.进一步地,采用mongodb数据库存储导航路线和地下车库信息。
20.进一步地,wifi指纹定位法具体步骤包括:
21.s21、采集地下车库参考节点的wifi信号特征参数,将参考节点的信号特征参数和位置信息作为一组数据存入位置指纹数据库;
22.s22、使用匹配算法将当前wifi信号特征参数与位置指纹数据库中的数据进行匹配,输出当前车辆的位置。
23.进一步地,获取用户终端请求的车位信息时,根据所选车位上的重量传感器判断车位上是否存在车辆,若否,则生成导航路线并将车辆导航至车位;若是,则将车位有车信息反馈至用户终端。
24.进一步地,其中一个wifi信号发射器设置在地下车库顶部,用于在多层地下车库中判断所处层数。
25.进一步地,多个wifi信号发射器布置于地下车库的多个角落中。
26.与现有技术相比,本发明具有以下优点:
27.1、本发明对地下车库进行了建模,通过设置在地下车库中的wifi信号发射器,根据车辆接收到的信号强弱判断车辆所处位置,并通过邻近算法生成导航路线并实现导航。本发明为用户提供了地下车库规划以及最优导航路径的生成,大大减少了在地下车库找车位的时间,效率高且实现简单。
28.2、本发明中对导航路线的生成结合了邻近算法和最短路径算法,分布计算确保了路线的准确性和合理性。
29.3、本发明采用mongodb数据库存储导航路线作为缓存数据,当车辆再次驶入对应车库时便可直接读取,避免了再次计算,提高了导航的效率。
30.4、本发明在地下车库的顶部设置了wifi信号发射器,根据接收信号的高度判断车辆所处车库的楼层,确保了导航路线的准确性。
附图说明
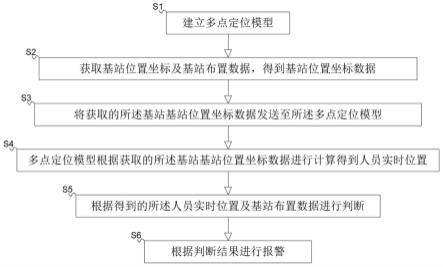
31.图1为本发明的总流程示意图。
32.图2为本发明涉及的地下车库平面图。
33.图3为本发明将地下车库划分区域后连接路径的示意图。
34.图4为本发明将地下车库转化为无向图的示意图。
35.图5为本发明将无向图以邻接矩阵存储的示意图。
36.图6为本发明地下车库的数据结构示意图。
37.图7为本发明的车位示意图。
38.图8为本发明位置指纹数据库的示意图。
39.图9为本发明涉及的地下车库的wifi信号发射器布置示意图。
40.图10为本发明应用的停车收费流程示意图。
具体实施方式
41.下面结合附图和具体实施例对本发明进行详细说明。本实施例以本发明技术方案为前提进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
42.本实施例提供了一种地下车库的车位导航方法,如图1所示,在车辆驶入车库时,
执行以下步骤:
43.步骤s1、生成地下车库平面模型,获取用户终端(手机)查询并请求的车位信息;
44.步骤s2、根据用户终端接收到的wifi信号强度,通过wifi指纹定位法获取当前车辆在地下车库中的位置;
45.步骤s3、根据当前车辆的位置和此前获取的车位信息,使用邻近算法生成导航路线并根据导航路线将车辆导航至车位。
46.其中,步骤s1具体包括:
47.首先,地下车库平面模型由车库每一层的平面图确定,如图2所示,将每个路口和车位标记为区域,将区域与区域之间的连接标记为路径,根据区域和路径生成区域连通无向图,如图3所示。得到连通图后以邻接矩阵的形式将无向图存入结构体中,如图4所示,连接的顶点表示对应的区域是相邻的。使用邻接表的形式进行后续的计算,如图5所示,单元格中的值表示不同区域之间的权重,用于后续计算最短路径。得到的地下车库的数据结构图可如图6所示。
48.其中邻接矩阵存储结构定义代码如下:
[0049][0050][0051]
同时,在获取到用户请求的车位后,会根据对应车位上的无线重量传感器和摄像头等设备(如图7所示)判断车位上是否存在车辆,若是,则会将用户所选车位上有车的信息反馈给用户终端,让用户重新选择车位;若否,则继续执行剩余的步骤,完成导航。
[0052]
步骤s2具体包括:
[0053]
首先,车库中均匀安装了多个wifi信号发射器,在车库中每一位置所获取的wifi信号强度都不一样,因此只需要判断获取的wifi信号强度即可实现位置的确定。具体内容如下:
[0054]
步骤s21、采集地下车库参考节点的wifi信号特征参数,例如信号场强、多径相角分量功率等,以rss向量表示,将参考节点的信号特征参数和位置信息作为一组数据存入位置指纹数据库,数据库如图8所示。
[0055]
步骤s22、利用接收机获取车辆所处位置的信号特征参数,使用匹配算法将当前wifi信号特征参数与位置指纹数据库中的数据进行匹配,最后将匹配到的参考节点的位置作为当前车辆的位置输出。
[0056]
值得注意的是,wifi信号发射器一般设置在地下车库的角落中,在本实施例中,如图9所示,wifi信号发射器共设置有4个,其中两个(a,c)设置在地下车库的两个角落中,另一个(b)设置在对边的中点上,主要依靠这三个wifi信号发射器来提供用于判断位置的信号。还有一个wifi信号发射器d设置在顶部,若该地下车库存在多层则设置在最顶层的顶部,通过该wifi信号发射器d即可根据不同高度的信号来判断车辆所处于地下车库的哪一层,因为采用平面模型存储地图,通过这样的设置可以确保车辆所处层数的准确性。
[0057]
步骤s3具体包括:
[0058]
步骤s31、使用邻近算法,本实施例优选为加权k近邻算法,获取距离当前车辆的位置最近的区域;
[0059]
步骤s32、使用最短路径(dijkstra)算法计算最近的区域到车位所属区域的最短路径;
[0060]
步骤s33、先将车辆导航至最近的区域,根据最短路径将车辆导航至车位。
[0061]
在获取了上述导航路线后将其与地下车库信息同时存储于mongodb数据库中,在下一次车辆驶入该车库时,用户可直接调用该信息,无需再进行计算,提升效率。
[0062]
另外,在地下车库中,如果每个位置都向服务器传输,服务器再回馈,会极大的受到网络速度和服务器延迟的影响,为了能实现车辆位置的实时显示,因此在传输导航路线之前会预先发送沿途一段距离内的位置指纹,以便在设备移动时可以通过缓存的方式实时显示位置。
[0063]
最后,在调用了每日的数据库日志后,还可以根据不同车位的停车频次,分析每个车位的空缺率,从而调整不同车位的计费标准,继而优化地下车库的停车规划,具体的停车收费流程如图10所示,主要依据传感器和摄像头来实现车辆出入的检测以及车牌号的登记。
[0064]
以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本发明的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。