1.本发明涉及光学检测技术领域,尤其是一种超分辨晶圆缺陷检测系统。
背景技术:
2.与电子显微镜相比,光学显微镜能够实时、动态、快速成像,成为人类历史上最具生命力的科学成就之一,在过去的几十年里,已经开发了各种超分辨率技术,包括共聚焦激光扫描显微镜(clsm)、结构照明显微镜(sim)、共焦显微镜(cm)、受激发射损耗显微镜(sted)、随机光学重建显微镜(storm)、光激活定位显微镜(palm)和可逆可饱和/可切换光学转变显微镜(resolft),在各种显微技术中,sim具有相对高速和在低照明强度下的宽视场成像能力,使其可供广泛的研究使用,其通过空间图案化的照明光来提高光学传递函数的截止频率,以获得理论上的双分辨率。
3.上述几种超分辨技术中,clsm是利用单点扫描物体实现的超分辨重构,但超分辨能力受限且不可调控,sim是利用结构光将高频信息加载至图像中,经重建后得到超分辨图像,但收到视场的限制且分辨率最多提高一倍,而sted和storm则是利用荧光分子的受激辐射与自发荧光的光波不同而使点扩散函数被压缩,并不是通过改进光学系统而实现的对超分辨晶圆缺陷的检测。
技术实现要素:
4.本发明的目的在于克服现有技术的不足,提供一种可以提高检测速度的超分辨晶圆缺陷检测系统。
5.本发明解决其技术问题是采取以下技术方案实现的:
6.一种超分辨晶圆缺陷检测系统,包括照明组件和成像组件,所述照明组件发射光源至成像组件中进行光斑检测;
7.所述照明组件包括激光器、空间滤波器、透镜、分光棱镜、空间光调制器和第一物镜,所述激光器发射激光光束至所述空间滤波器,所述空间滤波器通过对激光光束做滤波处理,生成滤波光束,滤波光束通过所述透镜射入所述分光棱镜,所述分光棱镜将所述滤波光束分为第一光束和第二光束,所述第一光束射入所述空间光调制器,所述空间光调制器对第一光束进行参量调制,所述第二光束射入所述第一物镜,透过所述第一物镜生成探测光束;
8.所述成像组件包括电动载物台、第二物镜和探测器,所述电动载物台用于承载晶圆待测样品,所述探测光束射至所述电动载物台上的待测样品,所述电动载物台携带待测样品移动至探测光束,由于待测样品不透明,所以经过探测光束的照射生成反射光回到所述分光棱镜中,生成第三光束,经过第二物镜传输至所述探测器中成像,点阵列的强度图案通过所述第二物镜在传感器上成像,首先,确定每个光点的相对位置,以计算光点的中心位置,通过计算光斑中心的强度,得到每个光斑的扫描图像,最后,将所有光斑的扫描图像合并为一幅完整图像;
9.所述电动载物台上设有衍射光学机构,所述衍射光学机构用于提供超分辨斑点阵列,所述衍射光学机构通过逐步补零g-s算法修改其焦平面的振幅分布,来约束斑点阵列;
10.所述逐步补零g-s算法为:
[0011][0012]
式中:areaⅰ和areaⅱ分别表示光斑阵列的目标区域和焦平面上的背景区域,i
t
为光斑阵列的强度分布,γ表示分辨率增强和光效率之间的关系系数,ε表示分辨率约束系数,0<ε<1。
[0013]
优选的,所述分光棱镜射出的第二光束通过孔径进入所述第一物镜。
[0014]
优选的,所述逐步补零g-s算法中的γ的计算公式为:
[0015]
γ=m/m;
[0016]
式中:m和m分别为光斑阵列的目标区域和焦平面上的背景区域的直径。
[0017]
优选的,所述衍射光学机构的焦平面上采样间隔为k,其中:
[0018]
k=λf/d;
[0019]
其中,λ为波长,f为第一物镜的焦距,d为衍射光学机构的直径。
[0020]
优选的,所述逐步补零g-s算法中的光斑阵列的强度分布为等强度均匀分布或按照某一函数规律分布。
[0021]
优选的,所述衍射光学机构为全息光学元件、微纳光学元件、二元光学元件、超构表面、空间光调制器或其他能实现光场相位调制和/或振幅调制的各类元件中的任意一种。
[0022]
优选的,所述探测器为互补金属氧化物半导体相机、电荷耦合相机、光场相机或其他能实现图像信息采集的器件中的任意一种。
[0023]
优选的,所述电动载物台的移动方式为水平方向扫描式、竖直方向扫描式、斜扫描式或其他平面全覆盖扫描式中的任意一种。
[0024]
本发明的优点和积极效果是:
[0025]
本发明通过衍射光学机构生成单点光斑,单点光斑成像于光学系统的物面,以实现对成像物体的照明,通过单点光斑对成像物体扫描,获取被扫描后的成像物体的图像信息,并根据图像信息进行图像重构,进而提高成像效率。
附图说明
[0026]
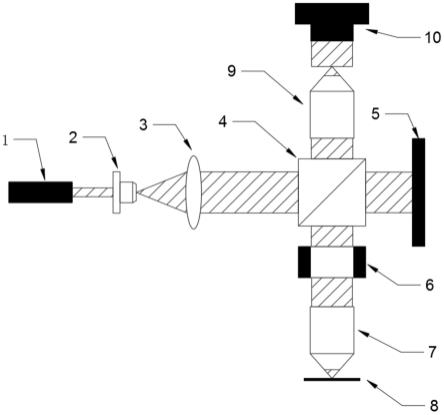
图1是本发明的光学系统配置结构示意图;
[0027]
图2是本发明的电动载物台的主视示意图;
[0028]
图3是本发明的逐步补零g-s算法的流程图;
[0029]
图4是本发明的不同光斑阵列形成的图像尺寸示意图;
[0030]
图5是本发明的点阵列样品的检测结果示意图。
[0031]
图中:1、激光器;2、空间滤波器;3、透镜;4、分光棱镜;5、空间光调制器;6、孔径;7、第一物镜;8、电动载物台;9、第二物镜;10、探测器。
具体实施方式
[0032]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于
本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0033]
需要说明的是,当组件被称为“固定于”另一个组件,它可以直接在另一个组件上或者也可以存在居中的组件。当一个组件被认为是“连接”另一个组件,它可以是直接连接到另一个组件或者可能同时存在居中组件。当一个组件被认为是“设置于”另一个组件,它可以是直接设置在另一个组件上或者可能同时存在居中组件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
[0034]
除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
[0035]
以下结合附图对本发明实施例做进一步详述:
[0036]
如图1所示,本发明所述的一种超分辨晶圆缺陷检测系统,包括照明组件和成像组件,照明组件发射光源至成像组件中进行光斑检测;
[0037]
照明组件包括激光器1、空间滤波器2、透镜3、分光棱镜4、空间光调制器5和第一物镜7,激光器1发射激光光束至空间滤波器2,空间滤波器2通过对激光光束做滤波处理,生成滤波光束,滤波光束通过透镜3射入分光棱镜4,分光棱镜4将滤波光束分为第一光束和第二光束,第一光束射入空间光调制器5,空间光调制器5对第一光束进行参量调制,分光棱镜4射出的第二光束通过孔径6进入第一物镜7,透过第一物镜7生成探测光束,第一物镜7具有照明和成像的功能;
[0038]
成像组件包括电动载物台8、第二物镜9和探测器10,电动载物台8用于承载晶圆待测样品,探测光束射至电动载物台8上的待测样品,通过移动电动载物台8,待测样品移动至探测光束,由于待测样品不透明,所以经过探测光束的照射生成反射光回到分光棱镜4中,生成第三光束,经过第二物镜9传输至探测器10中成像,点阵列的强度图案通过第二物镜9在传感器上成像,首先,确定每个光点的相对位置,以计算光点的中心位置,通过计算光斑中心的强度,得到每个光斑的扫描图像,最后,将所有光斑的扫描图像合并为一幅完整图像;
[0039]
电动载物台8上设有衍射光学机构,如图2所示,衍射光学机构用于提供超分辨斑点阵列,如图3所示,衍射光学机构通过逐步补零g-s算法修改其焦平面的振幅分布,来约束斑点阵列,逐步补零g-s算法为:
[0040][0041]
式中:areaⅰ和areaⅱ分别表示光斑阵列的目标区域和焦平面上的背景区域,i
t
为光斑阵列的强度分布,光斑阵列的强度分布i
t
为等强度均匀分布或按照某一函数规律分布,γ表示分辨率增强和光效率之间的关系系数,ε表示分辨率约束系数,0<ε<1。
[0042]
逐步补零g-s算法中的γ的计算公式为:
[0043]
γ=m/m;
[0044]
式中:m和m分别为光斑阵列的目标区域和焦平面上的背景区域的直径。
[0045]
为了提高光学系统的分辨率,首先要提高光斑阵列的分辨率,斑点阵列的另一个
重要因素是远离空间零阶,以确保实际应用中的高质量,同时,为了保证良好的性能,需要光斑阵列具有小的焦斑、高的光效率和低的均匀性误差,将衍射光学机构的焦平面上的采样间隔等效为k,即:
[0046]
k=λf/d;
[0047]
其中,λ为波长,f为第一物镜7的焦距,d为衍射光学机构的直径。
[0048]
一般情况下,艾里光斑的尺寸约等于0.9k,其被定义为半高宽,为了获得更精确的光斑,可以通过零加法将焦平面上的采样间隔减少至0.125k。
[0049]
如图4所示为不同点阵列下的光斑图像,a1和a2是3*3点阵列,b1和b2是5*5点阵列,a1是50%的光斑尺寸,即艾里光斑尺寸,a2是70%的光斑尺寸,a1和a2的艾里光斑是400*400像素,b1和b2的艾里光斑是550*550像素,c的艾里光斑是400*400像素,d1和d2的艾里光斑是400*400像素。
[0050]
如图5所示,a图像是3*3的点阵列,b图像是使用孔径na=0.25的第二物镜的宽视场的照明结果,c图像是由最佳建议的光学系统重建的图像。
[0051]
原则上,通过使用具有50%的艾里光斑尺寸的3*3超分辨率光斑阵列作为照明光束,可以在实验中证明光学系统可以实现大约两倍的分辨率,但应注意,点阵列(3*3或5*5)分布的数量/密度与图像的分辨率之间没有必然的关系,最大频率由照明点的大小决定,换句话说,光学系统的空间频率没有被扩展,但调制传递函数(mtf)得到了改善,为了更好的理解分辨率提高的机制,进一步选择在相同的数值孔径(na)为0.6的情况下,以50%的艾里光斑尺寸作为照明光束的单点超分辨(ss)显微镜、共焦显微镜(cm)和入射波长为561nm的衍射极限系统的mtf,实验证明,ss显微镜的mtf谱线轮廓更好,asm光学系统在扫描过程中对照明光斑阵列进行超分辨,只需计算光强和光斑中心坐标即可重建超分辨图像,无需进行复杂的数据处理。
[0052]
在超分辨晶圆缺陷检测光学系统中,衍射光学机构可为全息光学元件、微纳光学元件、二元光学元件、超构表面、空间光调制器或其他能实现光场相位调制和/或振幅调制的各类元件中的任意一种,探测器10可为互补金属氧化物半导体相机、电荷耦合相机、光场相机或其他能实现图像信息采集的器件中的任意一种,电动载物台8的移动方式可为水平方向扫描式、竖直方向扫描式、斜扫描式或其他平面全覆盖扫描式中的任意一种。
[0053]
本发明通过衍射光学机构生成单点光斑,单点光斑成像于光学系统的物面,以实现对成像物体的照明,通过单点光斑对成像物体扫描,获取被扫描后的成像物体的图像信息,并根据图像信息进行图像重构,进而提高成像效率。
[0054]
需要强调的是,本发明所述的实施例是说明性的,而不是限定性的,因此本发明并不限于具体实施方式中所述的实施例,凡是由本领域技术人员根据本发明的技术方案得出的其他实施方式,同样属于本发明保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。