1.本发明属于风力发电领域,具体涉及一种风力发电机组的转速功率控制方法,本发明还涉及了该转速功率控制方法应用的变速风力发电机组。
背景技术:
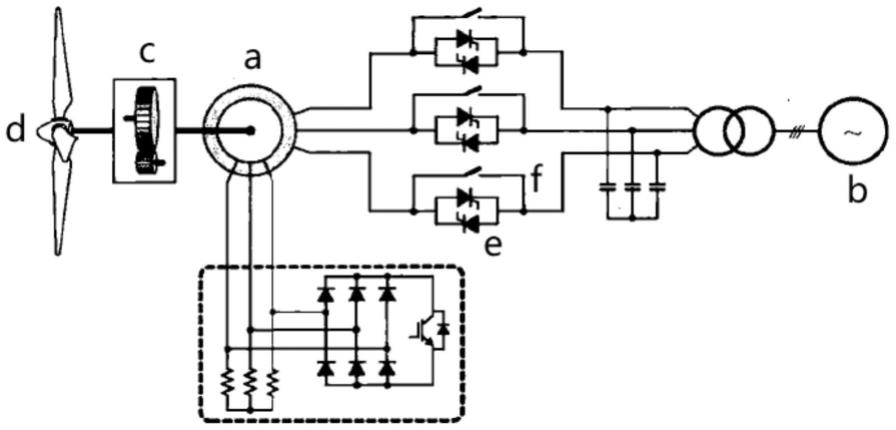
2.在风力发电领域中,变桨恒速异步风电机组通常包括带滑差控制系统的变速风力发电机组。请参见图1所示,带滑差控制系统的变速风力发电机组主要包括(绕线转子)异步发电机a,在工作运行时,异步发电机a的定子端始终保持与电网b连接,而异步发电机a的转子端,通过滑环将异步发电机a与可变滑差系统c连接。异步发电机a通过转动启动桨叶d以达到最佳桨叶角度,并实现对转子的加速;当异步发电机速度已经达到了同步速度时,通过软启动器e控制浪涌冲击电流实现并网之后,旁路接触器f接通并对软启动器e进行旁路,使得异步发电机a直接并入电网b。
3.具体来说,带滑差控制系统的变速风力发电机组的控制分别包括变桨控制和滑差控制,通过将两个控制协同工作使得变速风力发电机组达到动态最优稳定,变桨控制是基于实现一定风速下的目标转速作为控制工作点目标进行开环控制,属于慢速调节控制;而滑差控制是基于风力发电机组处于围绕在目标转速附近的动态最优稳定状态作为控制工作点目标进行闭环控制,属于快速调节系统。
4.然而,本技术人发现现有技术采取的控制技术在启动平稳性方面的表现较差,转速调节以及功率输出的波动性较大,这导致了对变速风力发电机组的较大冲击和载荷。
5.基于本技术人以及本技术人研发团队在风力发电控制领域的长期专注研究,决定对此进行立项研发,希望寻求技术方案来解决以上技术问题。
技术实现要素:
6.有鉴于此,本发明的目的在于提出一种风力发电机组的转速功率控制方法、变速风力发电机组,使得风力发电机组的转速实现稳态调节,风力发电机组实现了平稳启动和并网运行且风力发电机组的功率输出控制更加平稳可靠。
7.为此,本发明采用的技术方案如下:
8.一种风力发电机组的转速功率控制方法,包括速度控制模式和功率控制模式;当风力发电机组启动后,进入速度控制模式;当风力发电机组并网后,切换进入功率控制模式,其中,在所述速度控制模式中增加用于计算输出增益值的非线性增益控制模块,基于所述增益值控制调节风机转速特性,变桨转速控制器依据该风机转速特性计算输出变桨角度转速控制值,使得风力发电机组的实际转速在其目标并网转速给定值或其附近稳定工作。
9.一种风力发电机组的转速功率控制方法,包括速度控制模式和功率控制模式;当风力发电机组启动后,进入速度控制模式;当风力发电机组并网后,切换进入功率控制模式,其中,在所述功率控制模式中增加用于分别计算输出第一增益值和第二增益值的第一非线性增益控制模块和第二非线性增益控制模块,基于所述第一增益值和第二增益值控制
调节风机功率特性,变桨功率控制器依据该风机功率特性计算输出变桨角度功率控制值,使得风力发电机组的功率输出控制更加平稳可靠。
10.一种风力发电机组的转速功率控制方法,包括速度控制模式和功率控制模式;当风力发电机组启动后,进入速度控制模式;当风力发电机组并网后,切换进入功率控制模式,其中,在所述速度控制模式中增加用于计算输出增益值的非线性增益控制模块,基于所述增益值调节风机转速特性,变桨转速控制器依据该风机转速特性输出变桨角度转速控制值,使得风力发电机组的实际转速在其目标并网转速给定值或其附近稳定工作;同时在所述功率控制模式中增加用于分别计算输出第一增益值和第二增益值的第一非线性增益控制模块和第二非线性增益控制模块,基于所述第一增益值和第二增益值控制调节风机功率特性,变桨功率控制器依据该风机功率特性计算输出变桨角度功率控制值,使得风力发电机组的功率输出控制更加平稳可靠。
11.优选地,所述非线性增益控制模块根据桨叶实际位置的变化通过系数法计算输出增益值;基于该增益值与转速偏差值的乘积值来控制调节风机转速特性;其中,所述转速偏差值是目标并网转速给定值与风力发电机组实际转速之间的差值。
12.优选地,所述增益值通过系数法的计算过程包括:
13.当actual pitch angle[deg]小于0时,nonlineargain=1;
[0014]
当actual pitch angle[deg]大于或等于0时,
[0015]
nonlineargain=1/(betanonlingains actual pitch angle[deg]*alfanonlingains);
[0016]
其中,所述actual pitch angle[deg]为实际桨叶角度,所述nonlineargain为增益值。
[0017]
优选地,所述风机转速特性的计算公式为:output=k1_speedcontrol*input(1 k2_speedcontrol);其中,output为计算输出的变桨角度转速控制值setpitchangle_speed[deg];k1_speedcontrol和k2_speedcontrol分别为变桨转速控制器预设的控制参数;input为向所述变桨转速控制器输入的乘积值。
[0018]
优选地,所述第一非线性增益控制模块根据桨叶实际位置的变化通过查表法计算出第一增益值,将该第一增益值作为变桨功率控制器的第一输入;所述第二非线性增益控制模块根据转速偏差值进行非线性化处理计算出第二增益值,将该第二增益值作为变桨功率控制器的第二输入,所述变桨功率控制器基于所述第一增益值和第二增益值来控制调节风机功率特性;其中,所述转速偏差值是目标并网转速给定值与风力发电机组实际转速之间的差值。
[0019]
优选地,所述风机功率特性的计算公式为:
[0020]
output=input1*input2*k1_speedsfs*(1 k2_speedsfs) (input2-input2_last)*k3_speedsfs;其中,output为变桨角度功率控制值setpitchanlge_power[deg];k1_speedsfs、k2_speedsfs和k3_speedsfs为变桨功率控制器预设的控制参数,input1为所述第一增益值,input2为所述第二增益值,所述input2_last为在上一个计算周期的input2第二增益值。
[0021]
优选地,所述转速功率控制方法还包括滑差控制模式,所述滑差控制模式是指滑差控制器基于预设的滑差控制曲线对风力发电机组的功率进行控制;其中,根据该滑差控
制曲线确定目标并网转速给定值。
[0022]
优选地,一种风力发电机组,包括风机主控制器、变桨转速控制器、变桨功率控制器和滑差控制器;通过所述风机主控制器向变桨转速控制器和变桨功率控制器输出目标并网转速给定值,通过所述风机主控制器向所述滑差控制器输出滑差控制曲线;其中,所述风力发电机组采用如上所述的转速功率控制方法进行控制。
[0023]
需要特别说明的是,本技术全文涉及的风力发电机组的实际转速、目标并网转速给定值均是指发电机的实际转速、目标并网转速给定值;涉及的风力发电机组的功率均是指发电机的输出功率。
[0024]
还需要说明特别说明的是,本技术涉及的查表法以及非线性化处理均为控制计算领域的常规技术手段,不属于本技术的创造性内容,因此本技术对其具体方案本身不做任何特别限制;本技术的创造性内容是将这些公知常识结合应用到本技术的技术方案中,实现了具有独特性且突出进步性的控制效果。
[0025]
本技术创造性地提出在速度控制模式中增加单个非线性增益控制模块,根据桨叶实际位置的变化(也就是实际桨叶位置的不同)通过系数法计算出增益值,基于增益值控制调节风机转速特性,转速控制器通过基于该风机转速特性进行控制计算输出变桨角度转速控制值;最终使得风力发电机组的实际转速在其目标并网转速给定值或其附近稳定工作;本技术通过非线性增益控制使得风力发电机组的转速实现稳态调节,风力发电机组实现了平稳启动和并网运行。
[0026]
本技术创造性地提出在功率控制模式中增加第一非线性增益控制模块和第二非线性增益控制模块,第一非线性增益控制模块和第二非线性增益控制模块,在运行时,第一非线性增益控制模块根据桨叶实际位置的变化通过查表法计算出第一增益值,第二非线性增益控制模块根据转速偏差值进行非线性化处理计算出第二增益值,基于第一增益值和第二增益值控制调节风机功率特性,变桨功率控制器依据该风机功率特性计算输出变桨角度功率控制值,使得风力发电机组的功率输出控制更加平稳可靠;
[0027]
在采用以上功率控制模式的基础上,本技术还进一步提出滑差控制器基于预设的滑差控制曲线对风力发电机组的功率进行协同控制,进一步提高本技术对于转速稳定调节以及功率平稳输出的控制效果。
附图说明
[0028]
图1是公知风力发电机组的电连接结构示意图;
[0029]
图2是本技术具体实施方式下风力发电机组的控制器连接结构示意图;
[0030]
图3是本技术具体实施方式下速度控制模式的计算逻辑图;
[0031]
图4是本技术具体实施方式下功率控制模式的计算逻辑图;
[0032]
图5是本技术具体实施方式下滑差控制曲线图(图中的横坐标是发电机转速,单位:rpm;纵坐标为发电机功率,单位:kw);
[0033]
图6是本技术具体实施方式下变桨角度输出处理模块的计算逻辑图;
[0034]
图7是图6中变桨角度输出处理模块的具体计算过程示意图。
具体实施方式
[0035]
本发明实施例公开了一种风力发电机组的转速功率控制方法,包括速度控制模式和功率控制模式;当风力发电机组启动后,进入速度控制模式;当风力发电机组并网后,切换进入功率控制模式,其中,在速度控制模式中增加用于计算输出增益值的非线性增益控制模块,基于增益值调节风机转速特性,变桨转速控制器依据该风机转速特性输出变桨角度转速控制值,使得风力发电机组的实际转速在其目标并网转速给定值或其附近稳定工作;和/或,在功率控制模式中增加用于分别计算输出第一增益值和第二增益值的第一非线性增益控制模块和第二非线性增益控制模块,基于第一增益值和第二增益值控制调节风机功率特性,变桨功率控制器依据该风机功率特性计算输出变桨角度功率控制值,使得风力发电机组的功率输出控制更加平稳可靠。
[0036]
在具体实施时,可以单独选择在速度控制模式中增加非线性增益控制模块,也可以单独选择在功率控制模式中增加第一非线性增益控制模块和第二非线性增益控制模块,均可以获得其对应的技术效果,当然地,为了进一步利于本技术在实施时对转速功率的控制效果,本技术人建议采用组合实施。
[0037]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明中记载的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0038]
请参见图2所示,本实施例提出了一种风力发电机组,包括风机主控制器nacelle main controller、变桨转速控制器以及变桨功率控制器,可统称为pitch system controller,以及滑差控制器slip controller;通过nacelle main controller向pitch system controller输出目标并网转速给定值,同时通过nacelle main controller向slip controller输出滑差控制曲线;优选地,为了利于安装布局,在本实施方式中,nacelle main controller安装在风力发电机组机舱主控控制柜内部,pitch system controller安装在风力发电机组的轮毂变桨控制柜内部,用于控制变桨执行机构实现变桨动作,从而控制风力发电机组的转速;slip controller安装在风力发电机组机舱滑差控制柜内部;
[0039]
进一步优选地,在本实施方式中,slip controller用于检测滑差系统的电压和电流pwm信号,实现滑差系统的各种保护功能,控制滑差系统的igbt驱动回路(包括igbt driver、igbt resistor short circuit等),从而实现对发电机转子的电流控制,实现功率调节功能;需要说明的是,图2示出的其余结构件均为滑差控制结构的公知常识,为了节约说明篇幅,本实施例对其不做具体展开说明。
[0040]
在本实施方式中,风力发电机组采用如下所述的转速功率控制方法进行控制:
[0041]
一种风力发电机组的转速功率控制方法,包括速度控制模式和功率控制模式;当风力发电机组启动后,进入速度控制模式speedcontrol;当风力发电机组并网后,切换进入功率控制模式powercontrol,具体地,在本实施方式中,当风力发电机组通过速度控制模式使得风力发电机组的实际转速在其目标并网转速给定值或其附近稳定工作后,则判定风力发电机组可以进行并网,进而切换进入功率控制模式。
[0042]
请参见图3所示,在本实施方式中,在速度控制模式speedcontrol中增加用于计算输出增益值的非线性增益控制模块nonlineargain,基于增益值调节风机转速特性,变桨转
速控制器speedcontroller依据该风机转速特性输出变桨角度转速控制值setpitchanlge_speed[deg],使得风力发电机组的实际转速在其目标并网转速给定值或其附近稳定工作。
[0043]
优选地,在本实施方式中,非线性增益控制模块nonlineargain根据桨叶实际位置(即为当前实际桨叶角度actual pitch angle[deg])的变化通过系数法计算输出增益值;基于该增益值与转速偏差值的乘积值来控制调节风机转速特性;其中,转速偏差值是目标并网转速给定值generator speed reference[rpm]与风力发电机组实际转速generator speed[rpm]之间的差值,其中,目标并网转速给定值generator speed reference[rpm]由风机主控制器nacelle main controller给出的固定值。
[0044]
进一步优选地,在本实施方式中,增益值通过系数法的计算过程包括:
[0045]
当actual pitch angle[deg]小于0时,nonlineargain输出的增益值=1;
[0046]
当actual pitch angle[deg]大于或等于0时,nonlineargain输出的增益值=1/(betanonlingains actual pitch angle[deg]*alfanonlingains);其中,actual pitch angle[deg]为实际桨叶角度,nonlineargain为增益值,需要特别说明的是,本技术全文涉及的betanonlingains为速度控制器非线性增益beta,其取值范围通常为-2到2,alfanonlingains速度控制器非线性增益alfa,其取值范围通常为-1到1;具体优选地,在本实施方式中,通过对betanonlingains、alfanonlingains两个参数进行优化测试后,将betanonlingains取值为1.8892,将alfanonlingains取值为0.8407,进一步利于本技术的控制效果。
[0047]
优选地,在本实施方式中,风机转速特性的计算公式为:output=k1_speedcontrol*input(1 k2_speedcontrol);其中,output即、为计算输出的变桨角度转速控制值setpitchangle_speed[deg];k1_speedcontrol和k2_speedcontrol分别为变桨转速控制器预设的控制参数,通常为固定常数;input为向变桨转速控制器输入的乘积值=nonlineargain输出的增益值*(generator speed reference[rpm]-generator speed[rpm])。
[0048]
请参见图4所示,在本实施方式中,在功率控制模式powercontrol中增加用于分别计算输出第一增益值和第二增益值的第一非线性增益控制模块和第二非线性增益控制模块,基于第一增益值和第二增益值控制调节风机功率特性,变桨功率控制器依据该风机功率特性计算输出变桨角度功率控制值,使得风力发电机组的功率输出控制更加平稳可靠。
[0049]
优选地,在本实施方式中,第一非线性增益控制模块nonlineargain根据桨叶实际位置(即为当前实际桨叶角度actual pitch angle[deg])的变化通过查表法(采用公知的查表法)计算出第一增益值,将该第一增益值作为变桨功率控制器的第一输入;第二非线性增益控制模块nonlinear speed gain根据转速偏差值进行非线性化处理(具体通过非线性化拟合)计算出第二增益值,将该第二增益值作为变桨功率控制器的第二输入,变桨功率控制器基于第一增益值和第二增益值来控制调节风机功率特性;其中,转速偏差值是目标并网转速给定值generator speed reference[rpm]与风力发电机组实际转速generator speed[rpm]之间的差值。
[0050]
优选地,在本实施方式中,风机功率特性的计算公式为:
[0051]
output=input1*input2*k1_speedsfs*(1 k2_speedsfs) (input2-input2_last)*k3_speedsfs;其中,output为变桨角度功率控制值setpitchanlge_power[deg];k1_
speedsfs、k2_speedsfs和k3_speedsfs为变桨功率控制器预设的控制参数,通常为固定常数;input1为第一增益值,input2为第二增益值;input2_last为在上一个计算周期的input2第二增益值。
[0052]
请参见图5并结合图2所示,优选地,在本实施方式中,转速功率控制方法还包括滑差控制模式,滑差控制模式是指滑差控制器基于预设的滑差控制曲线a(具体通过风机主控制器nacelle main controller通信发送给滑差控制器slip controller)对风力发电机组的功率进行控制;其中,优选地,在本实施方式中,风机主控制器nacelle main controller根据该滑差控制曲线a确定向pitch system controller输出的目标并网转速给定值;其中,图5中的曲线a1为风力发电机组的实际转速-实际功率的对应关系曲线,可以看出在工作过程中,风力发电机组依据预设的滑差控制曲线a实施了基本一致的滑差控制。
[0053]
如本实施例以上所述,通过速度控制模式speedcontrol计算输出变桨角度转速控制值“setpitchanlge_speed[deg],通过功率控制模式powercontrol计算输出变桨角度功率控制值“setpitchanlge_power[deg]”,为了进一步说明本技术的实施工作过程,请进一步结合参见图6和图7所示,在实际工作时,通过变桨角度输出处理模块pitch angle output handler,根据风力发电机组的当前状态反馈来选择其输入值inputselected的赋值情况,最后得出变桨角度参考值pitch angel demand[deg]给风力发电机组的定变桨控制系统,从而实现对风力发电机组转速的稳态控制;
[0054]
具体来说,在本实施方式中,变桨角度输出处理模块pitch angle output handler的工作过程如下:
[0055]
当风力发电机组的状态处于转速控制模式时,选择setpitchangle_speed[deg]赋值给输入值inputselected;
[0056]
当风力发电机组的状态处于功率控制模式时,选择setpitchangle_power[deg]赋值给输入值inputselected;
[0057]
而当风力发电机组的状态处于停机模式时,直接选择90deg赋值给输入值inputselected;
[0058]
pitch angle output handler结合输入值inputselected以及结合将最小变桨速度minimum pitch speed、最大变桨速度maximum pitch speed、最小变桨角度0和最大变桨角度90均作为输入,来综合计算变桨角度的设定值pitchanglesetpoint[deg]作为其输出值,最后得到变桨角度参考值pitch angel demand[deg]。
[0059]
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
[0060]
此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。