技术特征:
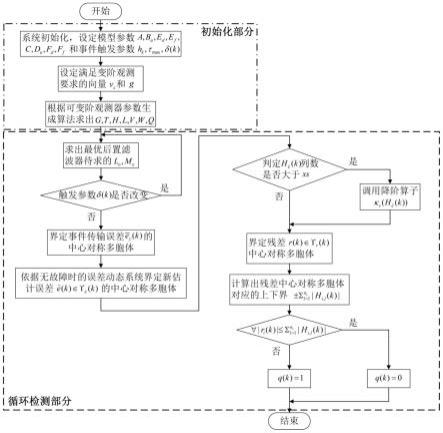
1.一种基于最优可变阶观测器的多车跟踪系统故障检测方法,其特征在于,包括以下步骤:a.构造包含未知扰动、传感器测量噪声和控制器故障的多车跟踪系统模型;b.为实现有限网络资源的充分利用,设计自适应混合事件触发机制来约束数据传输;c.构建数值与代数结合型的可变阶观测器参数矩阵生成算法,并通过设计和求解以最优后置滤波器为目标的性能权衡指标来增强生成残差对故障的灵敏性和对未知扰动的鲁棒性;d.构建在无故障时的误差动态系统,并依据残差各组成成分对应的中心对称多胞体得出受降阶算子阶次约束的残差中心对称多胞体;e.根据残差中心对称多胞体对应的上下界设定残差阈值,以增强基于中心对称多胞体故障检测算法的实用性,从而确保多车跟踪系统中的故障能被及时的检测出来。2.根据权利要求1所述的基于最优可变阶观测器的多车跟踪系统故障检测方法,其特征在于,所述步骤a中构造包含未知扰动、传感器测量噪声和控制器故障的多车跟踪系统模型具体如下:x(k 1)=ax(k) b
u
u(k) e
d
d(k) e
f
f(k)y(k)=cx(k) d
u
u(k) f
d
d(k) f
f
f(k)其中,分别表示多车跟踪系统中未知但有界的状态,系统的实际控制输入,未知扰动、故障信号和测量输出;此外,a,b
u
,e
d
,e
f
,c,d
u
,f
d
,f
f
均是具有适应维数的多车跟踪系统矩阵,并且满足rank(c)=m≤n,同时,(a,b)对是可控的,(a,c)对是可观测的。3.根据权利要求1所述的基于最优可变阶观测器的多车跟踪系统故障检测方法,其特征在于,所述步骤b具体为:所述为实现有限网络资源的充分利用,设计自适应混合事件触发机制来约束数据传输的事件触发机制如下:其中,k
i 1
为即将事件触发的时刻,k
i
为上一次事件触发的时刻,k
inf
=k
i
h
k
表示触发时刻的下界,h
k
为自适应静默时间,k
sup
=k
i
τ
max
表示触发时刻的上界,τ
max
表示最大触发间隔,i={1,...,m}表示含有m个数的集合,δ
g
(k)=y
g
(k)-y
g
(k
i
),0<δ
g
(k)<1为自适应触发阈值,拆分y(k)=[y1(k),...,y
g
(k),...,y
m
(k)]
t
,δ(k)=diag{δ1(k),...,δ
g
(k),...,δ
m
(k)}。4.根据权利要求1所述的基于最优可变阶观测器的多车跟踪系统故障检测方法,其特征在于,所述步骤c中:所述构建数值与代数结合型的可变阶观测器参数矩阵生成算法,并通过设计和求解以最优后置滤波器为目标的性能权衡指标来增强生成残差对故障的灵敏性和对未知扰动的鲁棒性,对应的可变阶观测器结构如下:鲁棒性,对应的可变阶观测器结构如下:
其中,表示可变阶观测器的状态向量(s≥n-m 1),表示生成的残差信号,表示y(k
i
)经零阶保持器处理后的值,r(k)表示待求的最优后置滤波器,“*”表示卷积符号;g,h,l,v,w,q和变阶观测过程中需要引入的矩阵t表示待设计的可变阶观测器参数矩阵,并为使得观测器生成的残差满足基本的残差生成条件,这些待设计的参数矩阵须满足著名的luenberger条件;为使得上述待设计的参数矩阵满足luenberger条件,构建的数值与代数结合型的可变阶观测器参数矩阵生成算法如下:先求解一组左零空间v
s
=[v
s,0 v
s,1
...v
s,s
],使其满足等式再设定一组向量g=[g
1 g2…
g
s
],确保矩阵g的稳定性则可变阶观测器中的剩余参数矩阵t,h,l可按如下公式依次生成:则可变阶观测器中的剩余参数矩阵t,h,l可按如下公式依次生成:对于参数矩阵v,w,q的设计将按以下步骤生成,首先,求解参数矩阵w,满足其中,表示c的零矩阵;其次,依据如下两个等式求解出参数矩阵v和q;v=wtc
t
(cc
t
)-1
q=vd
w
所述通过设计和求解以最优后置滤波器为目标的性能权衡指标来增强生成残差对故障的灵敏性和对未知扰动的鲁棒性,其对应的性能权衡指标如下:
应用互内外分解技术求解出的最优后置滤波器形式如下:r(z)=m
o-m
o
w(zi-g l
o
w)-1
l
o
其中,其中,x是以下离散riccati方程的稳定解:5.根据权利要求1所述的基于最优可变阶观测器的多车跟踪系统故障检测方法,其特征在于,所述步骤d中,构建在无故障时的误差动态系统,并依据残差各组成成分对应的中心对称多胞体得出受降阶算子阶次约束的残差中心对称多胞体,其过程具体包括以下步骤:通过引入新残差状态变量x
r
(k),定义事件传输误差利用所述自适应混合事件触发机制和可变阶观测器构造无故障时的误差系统:混合事件触发机制和可变阶观测器构造无故障时的误差系统:
其中,其中,通过假设多车跟踪系统的状态变量初值x(0),系统实际控制输入u(k),未知扰动d(k)满足不等式的约束;可知系统状态变量的初值,系统实际控制输入u(k),未知扰动d(k)分别界于如下的中心对称多胞体:x(0)∈υ
x
=<p0,h
x
>,u(k)∈υ
u
=<0,h
u
>,d(k)∈υ
d
=<0,h
d
>其中,且和为已知向量;通过假设新估计误差属于中心对称多胞体及其初始状态属于中心对称多胞体并依据所述自适应混合事件触发机制可知事件传输误差界于如下中心对称多胞体:其中,利用闵可夫斯基和的定义及中心对称多胞体存在的性质,设定合适阶次xs,用降阶算子κ
s
(
·
)约束的阶次,则对应所述无故障时的误差系统,得k 1时刻新估计误差和残差r(k)对应的中心对称多胞体:r(k 1)∈υ
r
(k 1)=<p
r
(k 1),h
r
(k 1)>其中,其中,其中,其中,其中,其中,其中,降阶算子κ
s
(
·
)通过将约束矩阵按欧式范数递减排列的顺序,选取设定约束阶次的前xs列来构成新矩阵。6.根据权利要求1所述的基于最优可变阶观测器的多车跟踪系统故障检测方法,其特征在于,所述步骤e具体内容如下:通过所述残差r(k)对应的中心对称多胞体,将中心对称多胞体生成矩阵h
r
(k)的上下界求解出来,构建出如下故障决策逻辑,从而避免较大的运算负载,提升算法在多车跟踪系统
上的实用性;其中,n
s
表示h
r
(k)的列数,r
i
(k)表示r(k)的第i个元素,h
i,l
(k)表示矩阵h
r
(k)的第i行,第l列的元素,实际检测中q(k)是故障标志,q(k)=0表示多车跟踪系统中无故障,q(k)=1表示多车跟踪系统中有故障。
技术总结
本发明提供了一种基于最优可变阶观测器的多车跟踪系统故障检测方法,属于故障检测技术领域。解决了事件触发下观测器残差对系统故障灵敏性不高的问题。其技术方案为:通过事件触发机制减少系统非必要的通讯传输,设计可变阶观测器用于残差生成,并求解性能指标获得最优后置滤波器来增强残差对扰动的鲁棒性和对故障的灵敏性,最后采用基于中心对称多胞体的方法设计出故障决策逻辑。本发明的有益效果为:本发明能在自适应混合事件触发机制下,有效降低多车跟踪系统非必要网络数据传输导致的损耗,并在可变阶观测器提升观测阶次灵活性的同时实现了残差对未知扰动具有鲁棒性和对故障具有灵敏性的权衡,最终实现对多车跟踪系统的最优故障检测。统的最优故障检测。统的最优故障检测。
技术研发人员:邱爱兵 吴劲松 姜旭 瞿遂春 王胜锋 彭家浩 李雪 马晨
受保护的技术使用者:南通大学
技术研发日:2022.04.20
技术公布日:2022/7/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。