1.本发明涉及工业物联网的领域,并且确切地说涉及一种信息获取方法、设备和系统。
背景技术:
2.在工业物联网系统中,从场系统获取数据且将其传输到工业云,这是实施工业物联网的解决方案的第一步骤。然而,此第一步骤仍需要大量的人工工作。场侧和云需要被配置,包含用于工业云的工业物联网模型的定义和用于场系统的数据源和数据点的配置。
3.当前,以下问题仍存在于获取工业物联网的数据中。首先,现有技术进一步需要取决于用于工业物联网模型和数据源的大量手动配置。其次,当场系统复杂且存在无数数据点时,数据获取极其缓慢且容易发生错误。另外,场系统的手动配置的工程师与云解决方案的工程师之间缺少足够通信。最后,当在信息模型中完全描述场系统时,仍需要手动配置数据点,所述信息模型包含opc ua等。
4.在现有技术中,一些云平台提供一系列工业物联网模型以供用户选择,但用户应知道哪个工业物联网装置连接到云平台。然而,此类云平台通常仅支持由云平台界定的通信语言的工业物联网装置,且不应用于其它通信协议的工业装置。
技术实现要素:
5.本发明的第一方面提供一种信息获取方法,其包含以下步骤:s1:使用边缘装置从场装置获取信息且将所述信息传输到云平台,其中所述信息包含数据和工业物联网模型;s2:将所述工业物联网模型转换成图形,且基于所述图形而执行相似性分析;以及s3:基于所述相似性分析而对所述工业物联网模型进行分类,产生包含类型或实例的第一工业物联网模型,且对所述第一工业物联网模型执行数据映射。
6.此外,步骤s2进一步包含以下步骤:s21:将所述图形转换成向量且用算法加载所述向量,以将所述图形转换成数字描述;s22:对所述向量执行所述相似性分析且对所述向量进行分级,并且提取所述工业物联网模型的所述类型;以及s23:存储相同类型的所述工业物联网模型。
7.此外,所述算法为随机游走算法。
8.此外,使用所述随机游走算法分析所述图形时所按的次序是基于以下规则:从所述图形的最边缘节点开始选择邻近节点,且选择数量为预设阈值的节点;仅选择除所述图形的所述最边缘节点外的节点;以及从所述图形的所述最边缘节点开始收集数量为所述预设阈值的所述节点,且当再次收集节点时,选择所述图形的层上的节点且选择数量大于所述预设阈值的节点。
9.本发明的第二方面提供一种信息获取系统,其包含:处理器;以及耦合到所述处理器的存储器,所述存储器具有存储于其中的指令,所述指令在由所述处理器执行时使电子装置执行动作,所述动作包含:s1:使用边缘装置从场装置获取信息且将所述信息传输到云
平台,所述信息包含数据和工业物联网模型;s2:将所述工业物联网模型转换成图形,且基于所述图形而执行相似性分析;以及s3:基于所述相似性分析而对所述工业物联网模型进行分类,产生包含类型或实例的第一工业物联网模型,且对所述第一工业物联网模型执行数据映射。
10.此外,动作s2进一步包含以下动作:s21:将所述图形转换成向量且用算法加载所述向量,以将所述图形转换成数字描述;s22:对所述向量执行所述相似性分析且对所述向量进行分级,并且提取所述工业物联网模型的所述类型;以及s23:存储相同类型的所述工业物联网模型。
11.此外,所述算法为随机游走算法。
12.此外,使用所述随机游走算法分析所述图形时所按的次序是基于以下规则:从所述图形的最边缘节点开始选择邻近节点,且选择数量为预设阈值的节点;仅选择除所述图形的所述最边缘节点外的节点;以及从所述图形的所述最边缘节点开始收集数量为所述预设阈值的所述节点,且当再次收集节点时,选择所述图形的层上的节点且选择数量大于所述预设阈值的节点。
13.本发明的第三方面提供一种信息获取设备,其包含:信息获取设备,其被配置成:使用边缘装置从场装置获取信息且将所述信息传输到云平台,所述信息包含数据和工业物联网模型;转换和分析设备,其被配置成:将所述工业物联网模型转换成图形,且基于所述图形而执行相似性分析;以及分类产生设备,其被配置成:基于所述相似性分析而对所述工业物联网模型进行分类,产生包含类型或实例的第一工业物联网模型,且对所述第一工业物联网模型执行数据映射。
14.本发明的第四方面提供一种计算机程序产品,所述计算机程序产品有形地存储在计算机可读介质上且包含计算机可执行指令,所述计算机可执行指令在被执行时使至少一个处理器执行根据本发明的第一方面的方法。
15.本发明的第五方面提供一种计算机可读介质,其存储计算机可执行指令,所述计算机可执行指令在被执行时使至少一个处理器执行根据本发明的第一方面的方法。
16.在数据获取期间,不需要装置侧上的现有模型来配置所述工业物联网模型,且可在本发明中减少调试工作。所述装置侧自动提取所述工业物联网模型且在所述云平台上产生所述工业物联网模型,而无需取决于所属领域技术人员的知识。产生关于所述装置侧和图形数据库的信息的所述工业物联网模型可在其它应用情境中重复使用。此外,在本发明中,装置侧模型被转换成节点图形,且所述节点图形存储在图形数据库中以用于在不同应用情境中的后续应用。所述装置侧模型的随机游走计算规则的图形嵌入和定义可适合于工业系统的特征。在本发明中,无配置云平台与所述装置侧集成,以使得建立工业物联网解决方案的困难得以减小。从所述装置侧到所述云平台的集成和知识转换会增强所述云平台的能力和功能性。
附图说明
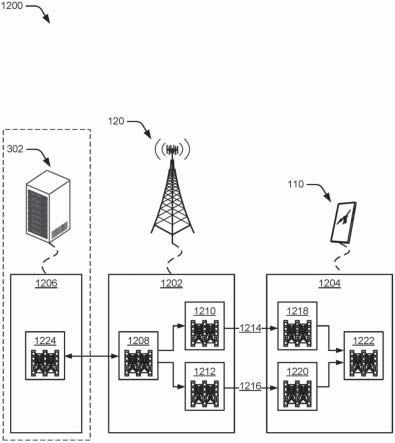
17.图1为根据本发明的具体实施例的信息获取系统的示意性结构图;
18.图2为根据本发明的具体实施例的将工业物联网模型转换成图形的示意图;以及
19.图3为根据本发明的具体实施例的图形节点的向量化的示意图。
具体实施方式
20.以下参考附图详细地描述本发明的具体实施方案。
21.本发明提供一种基于模型分析的工业物联网模型和数据信息获取机构,其提供用于工业物联网模型和数据获取的零配置。在本发明中,使用场系统中的现有工业物联网模型,且并不需要在数据获取过程中配置工业物联网模型,以使得可极大地减小手动调试工作负荷。在本发明中,可从场系统自动提取工业物联网模型,且在云系统中建立工业物联网模型,而无需取决于场系统的专家的实用知识。在本发明中,针对场系统建立工业物联网模型和图形数据库,且可重复使用工业物联网模型和图形数据库。
22.图1为根据本发明的具体实施例的信息获取系统的示意性结构图。如图1中所展示,信息获取系统包含场装置100、边缘装置200和云平台300。场装置100和边缘装置200示范性地安置于工厂的生产线末端,且边缘装置200分别连接到场装置100和云平台300。在本发明中,使用边缘装置200从场装置100收集数据,且在云平台中同时建立工业物联网模型。云平台为工业云平台。边缘装置200包含模型获取设备210和信息配置设备220。转换设备310、分析设备320和产生设备330安置于云平台300中。
23.本发明的第一方面中所提供的信息获取方法包含步骤s1、步骤s2和步骤s3。首先,执行步骤s1。使用边缘装置200从场装置100获取信息且将所述信息传输到云平台300。所述信息包含存储在场装置侧100上的现有数据和工业物联网模型。确切地说,本发明应用于工业装置系统,所述工业装置系统支持预定义的信息模型,例如opc ua网络和bac网络。因此,边缘装置200可从场装置侧100获取系统信息模型。确切地说,边缘装置200中的模型获取设备210被配置成:获取工业物联网模型且将其传输到云平台300,且边缘装置200中的数据配置设备220被配置成:获取数据且将数据传输到云平台300,且对随后在云平台300中建立的最终工业物联网模型执行信息配置。边缘装置200将系统模型转换成统一格式的模型,且将统一格式的模型传输到云平台300,例如json格式和xml格式。信息配置设备220被配置成执行数据获取配置,包含:使用服务来产生数据源、数据点和数据映射,并且将数据源、数据点和数据映射下载到边缘装置200。信息配置设备220基于所需配置而收集场装置100的数据且将所述数据传输到云平台300。
24.然后,执行步骤s2。云平台300中的转换设备310将工业物联网模型转换成图形,且云平台300中的分析设备320基于所述图形而执行相似性分析。确切地说,云平台300执行模型分析以自动产生系统的工业物联网模型,且对所述模型进行分类。所述图形存储在第一数据库db1中。
25.确切地说,步骤s2进一步包含子步骤s21、子步骤s22和子步骤s23。
26.在子步骤s21中,转换设备310将所述图形转换成向量且用算法加载所述向量,以将所述图形转换成数字描述。确切地说,图2为根据本发明的具体实施例的将工业物联网模型转换成图形的示意图。如图2中所展示,具体地说,工业物联网模型m1为场系统模型。为了随后提供灵活图形查询和随机游走算法,工业物联网模型m1被转换成图形g1且存储在第一数据库db1中。以例如rdf或性能图形之类的语义描述语言来描述图形g1。在此实施例中,工业物联网模型m1为opc-ua模型,即场装置网络管理的软件,且工业物联网模型m1包含网络中的装置及其细节。相应地,图形g1的节点和关系具有关于所有opc-ua模型的信息。
27.如图2中所展示,工业物联网模型m1是指opc ua树状结构模型,并且在步骤s21中,
工业物联网模型m1被转换成图形g1。确切地说,工业物联网模型m1的目标文件夹包含多个目标。第一层目标具有例如第一节点g
11“sn_dv_mon_siemens_3”、第二节点g
12“sn_dv_mon_siemens_15”、第三节点g
13“sn_dv_defaultsnmpdevice_2”等。第三节点g
13“sn_dv_defaultsnmpdevice_2”具有第二层目标,所述第二层目标包含第四节点g
21“deviceconfiguration”、第五节点g
22“devicedetail”等。此外,第五节点g
22“devicedetail”进一步包含第六节点g
31“devicename”和第七节点g
32“devicedescription”,并且第六节点g
31“devicename”进一步包含第八节点g
41“automationname”和第九节点g
42“sysname”。
28.因此,工业物联网模型m1被转换成图2中所展示的图形g2。所述图形的目标包含多个层中的节点。第四层中的节点包含第一节点g
11“sn_dv_mon_siemens_3”、第二节点g
12“sn_dv_mon_siemens_15”、第三节点g
13“sn_dv_defaultsnmpdevice_2”等。第三层中的节点包含第四节点g
21“deviceconfiguration”、第五节点g
22“devicedetail”等,第一层中的节点包含第六节点g
31“devicename”和第七节点g
32“devicedescription”,并且第一层中的节点包含第八节点g
41“automationname”和第九节点g
42“sysname”。第三节点g
13“sn_dv_defaultsnmpdevice_2”、第四节点g
21“deviceconfiguration”和第五节点g
22“devicedetail”当中的关系如下:第三节点g
13“sn_dv_defaultsnmpdevice_2”包含第四节点g
21“deviceconfiguration”和第五节点g
22“devicedetail”。第五节点g
22“devicedetail”、第六节点g
31“devicename”和第七节点g
32“devicedescription”当中的关系如下:第五节点g
22“devicedetail”包含第六节点g
31“devicename”和第七节点g
32“devicedescription”。第六节点g
31“devicename”、第八节点g
41“automationname”和第九节点g
42“sysname”当中的关系如下:第六节点g
31“devicename”包含第八节点g
41“automationname”和第九节点g
42“sysname”。
29.为了分析所有图形节点内容的相似性,需要图形中的向量信息,包含每一节点和一些图形片段的向量信息。分析设备320中的图形嵌入设备321被配置成:执行图形嵌入且从第一数据库db1下载图形。首先对节点执行向量化,且使用向量表示每一节点,包含节点名称、节点类型和关于节点类型的信息。在共同图形嵌入算法,节点通常为不具有任何结构的词语。然而,在此实施例的图形中,节点通常为目标,例如变量和文件夹,以使得可选择最重要的参数来表示唯一节点。因为需要提取图形中的重复结构/内容,所以需要嵌入类型相关参数而非节点的唯一识别符。如图3中所展示,在此实施例中,独热编码可用以产生表示节点的向量。换句话说,例如图形中每个节点的节点名称、节点类型和数据类型之类的变量被映射到向量,以将不同节点类型表示为不同向量。可理解,不同节点名称表示不同向量。如图3中所展示,在此实施例中,节点的节点名称使用独热编码变成向量“1,0,0,
…
0”,节点的节点类型使用独热编码变成向量“1,0,0,
…”
,且节点的数据类型使用独热编码变成向量“1,0,0,
…”
。
30.在子步骤s22中,相似性分析分级设备322被配置成:对向量执行相似性分析且对向量进行分级,并且提取工业物联网模型的类型。
31.接下来,对图形执行随机向量化。算法是随机游走算法,例如deepwalk和node2vec。随机游走算法用以分析节点的内容相似性,所述节点的内容表示在工业物联网模型或一种类型的资产的结构中的方面。在本发明中,定义随机游走算法和标记图形的一
些规则。在本实施例中,域系统模型为分层结构,且上部层中的节点更类似于下部层中的节点中的文件夹,以使得标记规则应适合于这些情境,即根据规则来选择节点的组合,且接着计算组合的值。
32.第一规则是:从图形的最边缘节点开始选择邻近节点,且选择数量为预设阈值的节点。
33.第二规则是:仅选择除图形的最边缘节点以外的节点,图形的最边缘节点为例如图形g1中的“目标”。
34.第三规则是:从图形的最边缘节点开始收集数量为预设阈值的节点,且再次选择图形的层上的节点。当再次收集节点时,选择在图形的层上且数量大于预设阈值的节点。举例来说,第一次收集3个节点,且第二次收集10个节点,即考虑最小组合和最大组合两者,且每一层中每一次收集的数量大于最后一次收集的数量。确切地说,n(i)表示每一取样的节点的数量,i表示取样时间,以使得n(1)《n(2)《
……
《n(x-1)《n(x)。
35.如图2中所展示,如果第一次对图形g1的节点进行取样,例如从第二层中的节点开始,那么第六节点g
31“devicename”被选择为第一开始节点,并且在g
31“devicename”以下的下部层中的节点被视为开始节点的内容和收集结果。在第一收集期间,收集三个节点,也就是说,图形g1的第一经取样节点包含第六节点g
31“devicename”、第八节点g
41“automationname”和第九节点g
42“sysname”。然后,第二次执行节点取样,且从第一取样的下一层对节点和性能进行取样,包含下部层中的节点。第六节点g
31“devicename”被选择为开始节点,以使得g
31“devicename”的下部层中的节点为开始节点的内容。然而,选择5个节点,也就是说,5个节点超过第一次取样的节点,包含第六节点g
31“devicename”、第八节点g
41“automationname”、第九节点g
42“sysname”、第七节点g
32“devicedescription”和第五节点g
22“devicedetail”。
36.在图形的节点的每一收集之后,将结果输入到随机游走算法中以获得一组向量,所述算法包含deepwalk或node2vec。对于每次执行的图形节点取样,开始节点具有一组样本节点和节点的向量。算法的输出是每一开始节点的向量,其表示每一节点的内容的相似性。在每一节点游走和取样之后执行算法计算,以使得可获取图形中的不同层中的不同节点之间的相似性。在计算节点内容相似性之后,可学习图形中存在的重复结构。假定如图2中所展示,图形中的重复结构包含下部层中的在图形g1中重复多次的第六节点g
31“devicename”、第五节点g
22“devicedetail”和节点结构,这些被视为工业物联网模型的方面。
37.在子步骤s23中,存储相同类型的工业物联网模型。
38.最后,执行步骤s3。用于产生设备330的工业物联网模型的分类设备331被配置成:基于相似性分析而对工业物联网模型进行分类;使用工业物联网产生设备332来产生包含类型或实例的第一工业物联网模型;并且对第一工业物联网模型执行数据映射。产生设备330从数据配置设备220获取工业物联网模型的数据配置。
39.任选地,可根据词语与工业词汇的比率来执行分类。分类设备331从第二数据库db2调用工业词汇。在前述步骤中,从模型分析获取工业物联网模型的方面或装置。因此,如果可以对工业物联网模型进行分类,那么工业物联网模型的分类有助于客户重复使用工业物联网模型并且有助于执行分析以供进行更好计算。确切地说,首先构造工业分类数据库,
即将标准分类词语用作数据库的基础,所述工业分类数据库定义类型、名称、结构和语义模型。使用字典服务收集同义词或相关词语,且接着可获得扩展的分类词语。接着,划分节点名称,即使用切词/分词工具来划分方面或装置的名称。最后,收集所述方面或所述装置的名称和分类的统计数据,即在分类词语中执行检索,且在最可能的分类资产名称中执行搜索,以使得可在此类型中对所述方面或所述装置进行分类。
40.在此步骤中,标记每一类型以用于后续搜索,例如,如果工业词汇中的名称是机器人或机器工具,那么机器人的爪被标记为机器人类型。
41.确切地说,在此步骤中,基于在前述步骤中所提取的方面和装置而在云平台300中建立工业物联网模型。在云平台300中产生方面类型、装置类型和装置。根据本发明的具体实施例,基于原始系统数据模型而执行数据获取配置,且产生装置群组。下文根据本发明的具体实施例来说明工业物联网模型:
[0042][0043]
边缘装置200的数据配置设备220下载数据获取配置以从装置侧100收集信息。所产生的方面或装置可在此情况下使用且还在下一代的工业物联网模型中重复使用。同一类型不应在云平台300的同一环境中产生两次。
[0044]
工业物联网产生设备332将所产生的工业物联网模型存储在第三数据库db3中。
[0045]
本发明的第二方面提供一种信息获取系统,其包含:处理器;以及耦合到所述处理器的存储器,所述存储器具有存储于其中的指令,所述指令在由所述处理器执行时使电子装置执行动作,所述动作包含:s1:使用边缘装置从场装置获取信息且将所述信息传输到云平台,所述信息包含数据和工业物联网模型;s2:将所述工业物联网模型转换成图形,且基于所述图形而执行相似性分析;以及s3:基于所述相似性分析而对所述工业物联网模型进行分类,产生包含类型或实例的第一工业物联网模型,且对所述第一工业物联网模型执行数据映射。
[0046]
此外,动作s2进一步包含以下动作:s21:将所述图形转换成向量且用算法加载所述向量,以将所述图形转换成数字描述;s22:对所述向量执行所述相似性分析且对所述向量进行分级,并且提取所述工业物联网模型的所述类型;以及s23:存储相同类型的所述工业物联网模型。
[0047]
此外,所述算法为随机游走算法。
[0048]
此外,使用所述随机游走算法分析所述图形时所按的次序是基于以下规则:从所述图形的最边缘节点开始选择邻近节点,且选择数量为预设阈值的节点;仅选择除所述图形的所述最边缘节点外的节点;以及从所述图形的所述最边缘节点开始收集数量为所述预设阈值的所述节点,且当再次收集节点时,选择所述图形的层上的节点且选择数量大于所述预设阈值的节点。
[0049]
本发明的第三方面提供一种信息获取设备,其包含:信息获取设备,其被配置成:
使用边缘装置从场装置获取信息且将所述信息传输到云平台,所述信息包含数据和工业物联网模型;转换和分析设备,其被配置成:将所述工业物联网模型转换成图形,且基于所述图形而执行相似性分析;以及分类产生设备,其被配置成:基于所述相似性分析而对所述工业物联网模型进行分类,产生包含类型或实例的第一工业物联网模型,且对所述第一工业物联网模型执行数据映射。
[0050]
本发明的第四方面提供一种计算机程序产品,所述计算机程序产品有形地存储在计算机可读介质上且包含计算机可执行指令,所述计算机可执行指令在被执行时使至少一个处理器执行根据本发明的第一方面的方法。
[0051]
本发明的第五方面提供一种计算机可读介质,其存储计算机可执行指令,所述计算机可执行指令在被执行时使至少一个处理器执行根据本发明的第一方面的方法。
[0052]
在数据获取期间,不需要装置侧上的现有模型来配置所述工业物联网模型,且可在本发明中减少调试工作。所述装置侧自动提取所述工业物联网模型且在所述云平台上产生所述工业物联网模型,而无需取决于所属领域技术人员的知识。产生关于所述装置侧和图形数据库的信息的所述工业物联网模型可在其它应用情境中重复使用。此外,在本发明中,装置侧模型被转换成节点图形,且所述节点图形存储在图形数据库中以用于在不同应用情境中的后续应用。所述装置侧模型的随机游走计算规则的图形嵌入和定义可适合于工业系统的特征。在本发明中,无配置云平台与所述装置侧集成,以使得建立工业物联网解决方案的困难得以减小。从所述装置侧到所述云平台的集成和知识转换会增强所述云平台的能力和功能性。
[0053]
尽管已通过以上优选实施例详细描述了本发明的内容,但应理解,以上描述不应被视为对本发明的限制。对于所属领域技术人员,对本发明的各种修改和替换在阅读以上内容之后将变得显而易见。因此,本发明的保护范围应受制于所附权利要求书。另外,权利要求书中的任何参考数字不应被解释为限制权利要求书;词语“包含/包括”不排除未在其它权利要求书或说明书中列出的设备或步骤;诸如“第一”和“第二”之类的词语仅用于指示名称,且并不指示任何特定次序。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。