技术特征:
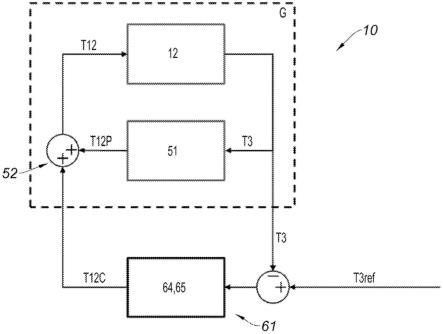
1.一种用于控制动力转向系统(1)的辅助马达(12)的方法(10),所述动力转向系统(1)包括至少一个方向盘(3)、所述辅助马达(12)、连接到齿条(6)的至少一个车轮(100,11)、以及实施主控制算法(51)的至少一个转向计算机(20),所述方向盘(3)被配置为接收由驾驶员施加的方向盘扭矩(t3),所述辅助马达(12)被配置为向齿条(6)施加马达扭矩(t12),所述主控制算法(51)包括根据至少所述方向盘扭矩(t3)确定主马达扭矩(t12p)的步骤,其特征在于,所述转向计算机(20)还包括用于方向盘(3)的振动的补偿算法(61),所述补偿算法(61)实施确定补偿马达扭矩(t12c)的步骤(62),使得所述方向盘扭矩(t3)等于参考方向盘扭矩(t3
ref
)。2.根据权利要求1所述的方法(10),包括求和步骤(52),其中,所述补偿马达扭矩(t12c)被加到所述主马达扭矩(t12p)上以确定所述马达扭矩(t12)。3.根据前述权利要求中任一项所述的方法(10),其中,所述参考方向盘扭矩(t3
ref
)等于0nm。4.根据前述权利要求中任一项所述的方法(10),其中,确定补偿马达扭矩(t12c)的步骤(62)包括通过高通滤波器过滤低频的阶段(64)。5.根据权利要求4所述的方法(10),其中,所述高通滤波器具有10hz的截止频率。6.根据前述权利要求中任一项所述的方法(10),其中,确定补偿马达扭矩(t12c)的步骤(62)包括通过将所述参考方向盘扭矩(t3
ref
)和所述方向盘扭矩(t3)相减来计算方向盘扭矩误差(δt3)的阶段(63)。7.根据权利要求6所述的方法(10),其中,确定补偿马达扭矩(t12c)的步骤(62)包括补偿阶段(65),在所述补偿阶段(65)中,控制器根据所述方向盘扭矩误差(δt3)确定所述补偿马达扭矩(t12c)。8.根据前述权利要求中任一项所述的方法(10),其中,所述补偿算法(61)的工作频率能够独立于所述主控制算法(51)的工作频率进行选择。9.根据权利要求8所述的方法(10),其中,所述补偿算法(61)的所述工作频率小于200hz。10.一种实施根据权利要求1至9中任一项所述的方法(10)的车辆(2)。
技术总结
一种用于控制动力转向系统(1)的辅助马达(12)(12)的方法(10),动力转向系统(1)包括至少一个方向盘(3)、辅助马达(12)、连接到齿条(6)的至少一个车轮(100,11)、以及实施主控制算法(51)的至少一个转向计算机(20),该方向盘(3)被配置为接收由驾驶员施加的方向盘扭矩(T3),该辅助马达(12)被配置为向齿条(6)施加马达扭矩(T12),主控制算法(51)包括根据至少方向盘扭矩(T3)确定主马达扭矩(T12P)的步骤,其中,转向计算机(20)还包括用于方向盘(3)的振动的补偿算法(61),该补偿算法(61)实施确定补偿马达扭矩(T12C)的步骤(62),使得方向盘扭矩(T3)等于参考方向盘扭矩(T3
技术研发人员:埃尔维
受保护的技术使用者:捷太格特欧洲公司
技术研发日:2020.11.26
技术公布日:2022/7/9
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。