1.本发明涉及养殖场清理设备技术领域及智能机器人控制领域,具体地,涉及一种能够实现自动避让的养殖场粪便清理与收集机器人。
背景技术:
2.随着我国养殖业规模、产能地不断增大,养殖牲畜地养殖户增多,养殖规模逐渐变大,养殖工作中的粪便清理已经成为了饲养人员较大的工作负担之一。而目前,养殖场的粪便清理主要分为人工清理作业和机械清理作业。传统的机械清理作业主要包括:铲车清理、水冲清理、电动刮板清理、智能化清理。
3.人工清理作业就是利用铁铲、扫把等工具,将粪便一一清扫,然后集中处理。这种方式劳动强度大、费时费力、工作环境恶劣,工作效率低。
4.机械清理作业就是利用机械的方式代替人工,相对于人工作业,机械清理作业具有效率更高,解放劳动力,无需考虑环境问题。但传统机械清理作业效率还是不够高,不够灵活方便,并且容易惊扰牲畜。
技术实现要素:
5.本发明要解决的技术问题在于,提供一种结构合理、使用方便、自动化程度高的集清理收集、转运输送及智能避障等功能于一体的自动避让的养殖场粪便清理与收集机器人,降低工作人员的劳动量,提高清粪效率,提升清粪效果。
6.本发明提供的一种自动避让养殖场粪便清理与收集机器人,包括收集装置、输送装置、升降装置、存储装置、车架、行走装置、智能控制系统、电池系统,其特征在于:
7.所述收集装置包括左挡板、右挡板、旋转刮板、螺旋刮刀、中层盖、步进电机a、链条组、轴承座a、轴承座b,齿轮,所述旋转刮板包括旋转主轴、安装于旋转主轴的半轴套、安装于半轴套上的刮板、安装于刮板末端的毛刷,所述螺旋刮刀包括螺旋主轴、安装于螺旋主轴的左旋刮片和右旋刮片,所述链条组包括链条i,链条ii,所述齿轮包括步进电机a齿轮、螺旋刮刀内齿轮、螺旋刮刀外齿轮、旋转刮板齿轮,所述旋转主轴和螺旋主轴分别通过轴承座a和轴承座b安装于左挡板和右挡板上,所述步进电机a水平置于中层盖右端,所述链条i通过步进电机a齿轮和螺旋刮刀内齿轮带动螺旋刮刀转动,所述链条ii通过螺旋刮刀外齿轮和旋转刮板齿轮带动旋转刮板转动。
8.所述输送装置包括输送装置本体及设于输送装置本体内的输送传动组件、提料斗,所述输送机构本体包括提升通道,所述提升通道倾斜设置,倾斜角度45
°
~60
°
,提升通道的上出料口位于存储装置的上方,所述提升通道下设有通道底板;所述输送传动组件包括提升电机及设置于提升通道上端的主动轮轴上的主动轮、设于提升通道下端的从动轮轴上的从动轮、连接于主动轮和从动轮上的链条,提升电机的动力输出端与主动轮轴通过传动连接组件连接,所述提料斗包括刮料板、挡料板及侧挡板,所述挡料板的两端分别连接与两组链条上且与链条运动方向平行,刮料板与挡料板垂直连接呈“l”形,侧挡板设于刮料板
的两端。
9.所述升降装置包括升降传动组件及设于升降传动组件下的导向组件,所述升降传动组件包括设于车架上的升降电机座,升降电机座上安装有升降电机,升降电机的动力输出端连接升降丝杠,升降丝杠安装于一组升降丝杠支撑座之间且在升降丝杠上套设升降块,升降块与升降丝杠之间为螺纹连接,升降块与提升通道的通道底板固定连接;所述导向组件包括设置于车架上的导轨及与导轨配合使用的导向滑块,所述导向滑块与提升通道固定连接。
10.所述存储装置包括存储厢及安装于行走装置上车底盘的开合装置,所述开合装置包括开合门、与开合门上的轨道配合的开合滑块、与开合滑块相切的开合连杆、连杆电机,所述开合连杆安装与连杆电机上,所述连杆电机安装与行走装置上的车底盘上。
11.所述行走系统包括车底盘、行走动力组件及转向组件。所述行走动力组件包括两个主动行走轮、两个随动行走轮,两个主动行走轮分别通过两个连接轴独立安装与车底盘两侧,且为每个主动行走轮上安装一个行走电机,两个随动行走轮分别通过轴承安装到转向组件上;所述转向组件包括固定于车底盘的转向拉杆及转向电机座,安装于转向电机座上的转向电机,转向l拉杆与转向电机配合,转向竖直拉杆与转向l拉杆配合,转向拉杆两端安装于转向件共同带动转向件转动,从而使随动行走轮转向,所述转向件、转向竖直拉杆、转向l拉杆、转向拉杆转向横拉杆共同组成连杆机构通过转向电机的动力输出端带动随动行走轮转向。
12.所述智能控制系统包括控制器、料位计及避障传感器,所述控制器内设无线控制模块,无线控制模块通过云服务器与移动终端互联,通过移动终端可控制无线控制模块,控制器的信号输入端分别与料位计及避障传感器电性连接,控制器的信号输出端与行走电机电性连接,所述料位计设于存储装置内部,所述避障传感器设于车架后部的两个角上及收集装置前部的两个角上。
13.所述电池系统包括蓄电池,蓄电池上连接有充电接口及电池电量监控模块,所述蓄电池分别与步进电机a、提升电机、升降电机、连杆电机、行走电机、转向电机、料位计、避障传感器及控制器电性连接,所述充电接口设于车架侧部,所述电池电量监控模块与控制器电性连接。
14.优选的,还包括所述收集装置与输送装置之间通过收集装置的左挡板及右挡板与输送装置前端的连接板实现焊接,输送装置与升降装置用螺纹连接,车架有一个槽型结构,可以放入升降装置,再利用螺纹实现连接。在整个车架的内部,焊接有存储装置的存储厢,在存储厢下面有一个曲柄滑块机构,即开合装置,该机构用螺纹连接在车底盘上。
15.优选的,还包括喷水消毒装置,所述喷水消毒装置,是在整体小车的前后装有喷水口,前面的喷水口加装水,后面的喷水口加装消毒水。
16.优选的,还包括监测装置,所述监测装置用于监测养殖场养殖动物的生命体征,以及调整消毒水的含量,改善养殖场环境。
17.本发明的工作原理,本发明的自动避让的养殖场粪便清理与收集机器人,收集装置由旋转刮板和螺旋刮刀(绞龙)两部分组成。其中,旋转刮板的末端设有毛刷,一方面能减少刮板的磨损,提高刮板的寿命,另一方面能够提高清洁效率;绞龙轴上装有旋向相反的两段螺旋叶片,且对称布置,能够将两侧的粪污收集到中间部位,达到聚拢粪便的效果。清理
装置工作时,电机带动链条i转动,蛟龙随之转动,蛟龙通过链条ii带动旋转刮板转动。机器人向前开动,清理装置前方的粪污不断堆积到旋转刮板的前方,被旋转刮板输送到绞龙里。粪污被旋向相反的两段螺旋叶片刮削并向中部螺旋输送,从而把粪污连续输送到刮板输送机构的前端,实现了粪污的收集。输送装置是将收集装置中聚拢的粪污运送到储粪装置内,实现纵向运输的效果,刮粪槽的设计防止粪污在提升过程中下落。在运输装置工作时,刮粪槽运动到运输装置的最下端,依靠其转向动作将粪便铲起来,之后刮粪槽携带粪污沿着运输装置的后壁提升上去,再顺着运输装置的缺口处,依靠重力顺着板面滑进存储装置。升降装置是连接在运输装置与车架上的,主要构成部件为丝锥,它的作用是在智能清粪机器人不工作时,将运输装置提升起来,以减少运输装置与地面的摩擦,从而延长机器的使用寿命。当提升装置工作时,电机带动皮带转动,进而带动丝锥上升,将运输装置提升。将输送装置里落下的粪便会沿着壁面下滑至存储厢中存储起来。在存储量达到一定程度后,小车能够自动将收集装置提起,然后移动至卸粪池,打开开合装置,实现粪便的排放。当检测到粪便都已排放之后,再次关闭开合装置,使机器人回到原来位置,继续开始清理工作。
18.在上述工作过程中,控制器可以设定行走路线,通过控制行走机构,实现在预定范围内的清扫。当机器人前端的避障传感器检测到附近有障碍物时,传感器将障碍信号传给控制器,便于控制器调整路线,从而实现自动避障的功能。同时,电池电量监控模块可以实时监测机器人的电量信息,但电池电量低于一定值时,会发送低电量信号,控制器接收到低电量信号,会重新规划路线,使得机器人可以走向充电桩,实现自动充电的功能。另外,料位计可以在存储厢里的粪便达到一定量时,发出装满信号,控制器接收到该信号可以调整路线,使得机器人来到储粪池,打开开合装置,实现自动泄粪的功能。
19.本发明的有益效果:本发明提供的一种自动避让养殖场粪便清理与收集机器人,集粪便的收集、运输、储存、排放于一体,附加自动避障与自动充电的功能,具有结构合理、适用性强、自动化程度高的特点,使用该自动避让养殖场粪便清理与收集机器人,可以降低劳动力,提高清粪效率。
附图说明
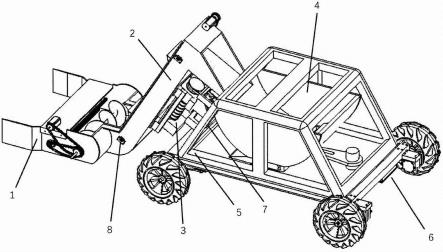
20.图1为本发明的结构示意图;
21.图2为图1中收集装置的结构示意图;
22.图3为图2中的螺旋刮板和旋转刮板的结构示意图;
23.图4为图3的左视图;
24.图5为图1中输送装置的结构示意图;
25.图6为图5中的刮板的结构示意图;
26.图7为升降装置装置的结构示意图;
27.图8为存储装置、行走装置的结构示意图;
28.图9为图8中车底盘的俯视图;
29.图10为检测装置和充电装置的结构示意图;
30.图中:收集装置1,输送装置2,升降装置3,存储装置4,车架5,行走装置6,智能控制系统7,电池系统8,左挡板10,右挡板11,旋转刮板12,旋转主轴12-1,毛刷12-2,刮板12-3,半轴套12-4,螺旋刮刀13,螺旋主轴13-1,左旋刮板13-2,右旋刮板13-3,中层盖14,步进电
机a15,链条组16,链条i 16-1,链条ii 16-2,轴承座a17,轴承座b18,齿轮19,步进电机a齿轮19-1,螺旋刮刀内齿轮19-2,螺旋刮刀外齿轮19-3,旋转刮板齿轮19-4,输送装置本体20,输送传动装置21,提升通道20-1,出料口20-2,连接板20-3,通道底板20-4,提升电机21-1,主动轮轴21-2,从动轮轴21-3,主动轮21-4,从动轮21-5,链条21-6,传动连接组件21-7,提料斗22,刮料板22-1,挡料板22-2,侧挡板22-3,升降传动组件30,升降电机座30-1,升降电机30-2,升降丝杠30-3,升降丝杠支撑座30-4,升降块30-5,导向组件31,导轨31-1,导向滑块31-2,存储厢40,开合装置41,开合门41-1,开合滑块41-2,开合连杆41-3,连杆电机41-4,车底盘60,行走动力组件61,主动行走轮61-1,连接轴61-2,行走电机61-3,随动行走轮61-4,转向组件62,转向件62-1,转向竖直拉杆62-2,转向l拉杆62-3,转向电机62-4,转向拉杆62-5,转向横拉杆62-6,转向电机座62-7,控制器70,料位计71,避障传感器72,蓄电池80,充电接口81,电池电量监控模块82。
具体实施方式:
31.实施例1:
32.如图1所示,本实施例的自动避让养殖场粪便清理与收集机器人,包括收集装置1、输送装置2、升降装置3、存储装置4、车架5,行走装置6,智能控制系统7,电池系统8,其中:
33.如图2、图3、图4所示,所述收集装置1包括左挡板10、右挡板11、旋转刮板12、螺旋刮刀13、中层盖14、步进电机a15、链条组16、轴承座a17、轴承座b18,齿轮19,所述旋转刮板12包括旋转主轴12-1、安装于旋转主轴12-1的半轴套12-4、安装于半轴套12-4上的刮板12-3、安装于刮板12-3末端的毛刷12-2,所述螺旋刮刀13包括螺旋主轴13-1、安装于螺旋主轴13-1的左旋刮片13-2和右旋刮片13-3,所述链条组16包括链条i 16-1,链条ii 16-2,所述齿轮19包括步进电机a齿轮19-1、螺旋刮刀内齿轮19-2、螺旋刮刀外齿轮19-3、旋转刮板齿轮19-4,所述旋转主轴12-1和螺旋主轴13-1分别通过轴承座a17和轴承座b18安装于左挡板10和右挡板11上,所述步进电机a15水平置于中层盖14右端,所述链条i 16-1通过步进电机a齿轮19-1和螺旋刮刀内齿轮19-2带动螺旋刮刀13转动,所述链条ii 16-2通过螺旋刮刀外齿轮19-3和旋转刮板齿轮19-4带动旋转刮板12转动。
34.如图5、图6所示所述输送装置2包括输送装置本体20及设于输送装置本体20内的输送传动组件21、提料斗22,所述输送机构本体20包括提升通道20-1,所述提升通道20-1倾斜设置,倾斜角度45
°
~60
°
,提升通道20-1的上出料口20-2位于存储装置4的上方,所述提升通道下设有通道底板20-4;所述输送传动组件21包括提升电机21-1及设置于提升通道20-1上端的主动轮轴21-2上的主动轮21-4、设于提升通道20-1下端的从动轮轴21-3上的从动轮21-5、连接于主动轮21-4和从动轮21-5上的链条21-6,提升电机21-1的动力输出端与主动轮轴21-2通过传动连接组件21-7连接,所述提料斗22包括刮料板22-1、挡料板22-2及侧挡板22-3,所述挡料板22-2的两端分别连接与两组链条21-6上且与链条运动方向平行,刮料板22-1与挡料板22-2垂直连接呈“l”形,侧挡板22-3设于刮料板22-1的两端。
35.如图7所示,所述升降装置3包括升降传动组件30及设于升降传动组件30下的导向组件31,所述升降传动组件30包括设于车架5上的升降电机座30-1,升降电机座30-1上安装有升降电机30-2,升降电机30-2的动力输出端连接升降丝杠30-3,升降丝杠30-3安装于一组升降丝杠支撑座30-4之间且在升降丝杠30-3上套设升降块30-5,升降块30-5与升降丝杠
30-3之间为螺纹连接,升降块30-5与提升通道21-1的通道底板20-4固定连接;所述导向组件31包括设置于车架5上的导轨31-1及与导轨31-1配合使用的导向滑块31-2,所述导向滑块31-2与提升通道20-1固定连接。
36.如图8所示,所述存储装置4包括存储厢40及安装于行走装置6上车底盘60的开合装置41,所述开合装置41包括开合门41-1、与开合门41-1上的轨道配合的开合滑块41-2、与开合滑块相切的开合连杆41-3、连杆电机41-4,所述开合连杆安装与连杆电机41-4上,所述连杆电机41-4安装与行走装置6上的车底盘60上。
37.如图9所示,所述行走系统6包括车底盘60、行走动力组件61及转向组件62。所述行走动力组件61包括两个主动行走轮61-1、两个随动行走轮61-4,两个主动行走轮61-1分别通过两个连接轴61-2独立安装与车底盘60两侧,且为每个主动行走轮61-1上安装一个行走电机61-3,两个随动行走轮61-4分别通过轴承安装到转向组件62上;所述转向组件62包括固定于车底盘60的转向拉杆62-5及转向电机座62-7,安装于转向电机座62-7上的转向电机62-4,转向l拉杆62-3与转向电机62-4配合,转向竖直拉杆62-2与转向l拉杆62-3配合,转向拉杆62-5两端安装于转向件62-1共同带动转向件62-1转动,从而使随动行走轮61-4转向,所述转向件62-1、转向竖直拉杆62-2、转向l拉杆62-3、转向拉杆转向横拉杆62-6共同组成连杆机构通过转向电机62-4的动力输出端带动随动行走轮61-4转向。
38.如图10所示,所述智能控制系统7包括控制器70、料位计71及避障传感器72,所述控制器70内设无线控制模块,无线控制模块通过云服务器与移动终端互联,通过移动终端可控制无线控制模块,控制器70的信号输入端分别与料位计71及避障传感器72电性连接,控制器70的信号输出端与行走电机61-3电性连接,所述料位计71设于存储装置4内部,所述避障传感器72设于车架5后部的两个角上及收集装置1前部的两个角上。
39.所述电池系统8包括蓄电池80,蓄电池80上连接有充电接口81及电池电量监控模块82,所述蓄电池80分别与步进电机a15、提升电机21-1、升降电机30-2、连杆电机41-4、行走电机61-4、转向电机62-4、料位计72、避障传感器73及控制器71电性连接,所述充电接口81设于车架5侧部,所述电池电量监控模块82与控制器70电性连接。
40.所述收集装置1与输送装置2之间通过收集装置1的左挡板10及右挡板11与输送装置2前端的连接板20-3实现焊接,输送装置2与升降装置3用螺纹连接,车架5有一个槽型结构,可以放入升降装置3,再利用螺纹实现连接。在整个车架的内部,焊接有存储装置4的存储厢40,在存储厢40下面有一个曲柄滑块机构,即开合装置41,该机构用螺纹连接在车底盘60上。
41.还包括喷水消毒装置,所述喷水消毒装置,是在整体小车的前后装有喷水口,前面的喷水口加装水,后面的喷水口加装消毒水。
42.还包括监测装置,所述监测装置用于监测养殖场养殖动物的生命体征,以及调整消毒水的含量,改善养殖场环境。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。