1.本发明涉及一种基于全连通网络的三领队低成本无人飞行器编队协同定位方法。
背景技术:
2.导航系统是低成本无人飞行器的生命线,寻的制导系统则是无人飞行器能够实现末制导突防命中的重要依仗。导引头作为寻的制导系统的重要组成部分更是举足轻重,一般情况下,导引头的造价在无人飞行器成本中的占比更是高达三成到四成。因此,诸多研究以导航制导系统为切入点探索压缩成本的方案。目前,低成本无导引头无人飞行器制导主要采用地面站协助等外部制导方案,然而地面站造价高昂且容易暴露,一旦损毁代价极大,且前端战场环境复杂,地面站通信和gps导航正是敌方主要的干扰目标。
3.一方面,现代战场复杂的体系对抗对制导系统提出了更高的性能要求,技术集成、优化升级的同时,导航制导系统的身价更是随之节节攀升。另一方面,攻防博弈此消彼长,拒止或降级的作战环境都会极大的影响导航制导系统的精度,导引头也极易因受到干扰而丢失目标。因此,高性能无人飞行器单兵作战受制于自身定位,威胁程度直线下降。因此,研究低成本无人飞行器定位能够实现导航制导系统的成本降低,具有极大的工程价值。
4.随着网络通信技术的不断发展,相比于高性能无人飞行器的强势威胁,通过数据链通信无人飞行器编队可充分发挥规模优势,进一步,结合低成本无人飞行器更可借助无人飞行器编队充分提升成本优势。然而,低成本无人飞行器编队的自身定位问题也随之而来。传统的惯性导航系统虽然具有成本低、自主性强等优点,但随着时间产生的漂移误差极易造成脱靶。因此如何结合惯导信息和数据链通信实现协同定位亟待解决。
5.目前,对异质无人飞行器编队自身完成协同定位的理论研究成果鲜有报道,如何结合数据链测距实现无导引头编队协同定位急需进行理论突破。因此,本发明针对高低配异质无人飞行器编队提出一种基于全连通网络的三领队低成本无人飞行器编队协同定位方法。
技术实现要素:
6.针对目前对研究尚不充分的低成本无人飞行器编队协同定位技术,本发明基于数据链测距和网络通信,提出了一种基于惯组测量信息的异质编队协同定位技术。该方法首先构建三领队低成本异质编队的数据链通信规则,在此基础上通过全连通通信结构、根据数据链测得的无人飞行器之间相对距离构建非线性方程组,再者根据惯组测量信息确定搜索范围,结合粒子群算法实现定位误差容许下的协同定位以实现对惯组测量位置误差的在线纠偏。
7.按以下设计步骤对本发明作详细说明。
8.步骤一、三领队异质无人飞行器异质编队信息获取
9.高性能领队无人飞行器依次记为mk,k=1,2,3,对应坐标位置已知,记为(xk,yk,
zk)。
10.低性能无人飞行器依次记为fi,i=4,5,...,n(n≥6),对应坐标位置未知,记为(x
fi,yfi
,z
fi
)。
11.低成本惯性组件漂移最大误差记为me,低成本无人飞行器测量位置信息已知,记为
12.步骤二、构建三领队异质无人飞行器编队通信网络
13.首先,选取某一领队无人飞行器作为中心节点通过网络通信集合已有信息进行协同定位解算并发送解算结果。
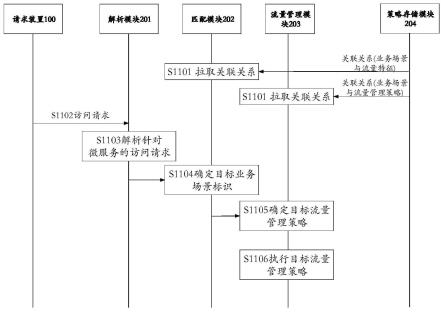
14.其次,基于全连通通信网络构建三领队无人飞行器与低成本无人飞行器之间的领从关系,低性能无人机中存在三个低性能无人机f1,f2,f3分别与三个领队无人飞行器之间形成通信关系,且三个低性能无人机f1,f2,f3之间形成全连通,示意图如图1所示,即全连通基础结构中每个无人飞行器之间均能实现数据链测距。数据链通信测距信息已知,异质编队中低成本无人飞行器fi和高性能领队无人飞行器mk之间的距离记为r
jk
其中j≠k,低成本无人机之间距离r
ij
=r
ji
,即有
[0015][0016]
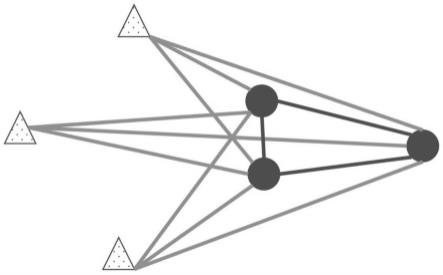
再者,构建附加结构,当编队中低成本无人机数量n>6时,低性能无人机fi(i>6)需与被选为中心节点的无人机之间存在双向通信,且同时与编队中任意三个不同无人机之间存在双向通信,示意图如图2所示。与异质编队中低成本无人飞行器fi(i>6)通信的无人机编号合集记为ci={c1,c
i2
,c
i3
,c
i4
},i>6,其中,c
i2
,c
i3
,c
i4
∈{1,...,n}-{c1}数据链通信测距信息已知,可表示为
[0017]rij
,i>6,j=c1,c
i2
,c
i3
,c
i4
。
[0018]
步骤三、建立三领队异质无人飞行器编队协同定位方程组
[0019]
结合数据链测距信息和相对位置方程,令x=[x
fi
,y
fi
,z
fi
],i=4,5,...,n(n≥6),建立领从协同定位相对位置方程组如下
[0020][0021]
其中x即为协同定位的解集,前12个方程为3高性能飞行器和3个低性能飞行器基于全连通网络共同构成的基础结构方程,后续方程则是根据低性能飞行器实际的通信情况给出相应方程。
[0022]
记gq为g(x)的第q(q=1,2,...,4(n-3))个行向量范数,即
[0023][0024]
从而,优化代价函数定义为
[0025][0026]
步骤四、基于惯组测量信息的协同定位解算
[0027]
利用集中式结构的中心节点解算无人飞行器位置信息,选取粒子群优化方法基于惯组测量位置信息进行小范围搜索从而实现无人飞行器编队协同定位非线性方程组的解算,领队无人飞行器求解协同定位非线性方程组获得低成本无人飞行器所在位置并通过通信网络传递给各无人飞行器,从而低成本实现协同定位。
[0028]
针对上述所描述的非线性优化问题,本发明拟采用适合此类问题的粒子群优化算法进行求解。
[0029]
首先,初始化粒子群。
[0030]
根据惯组测量位置信息和惯组漂移最大误差me确定搜索范围。
[0031]
设置初始化参数种群大小s,迭代次数p=1,2,...,maxiter,粒子速度v,粒子最大速度v
max
,学习因子c1,c2,惯性权重w,权重上下界w
max
,w
max
及中止精度er,er。
[0032]
其次,计算每个粒子的适应度
[0033]
记粒子个体历史最优为pbest,即粒子经历过的最好位置。对于每个粒子,将其适应值与其本身所经历过的历史最好位置的适应值比较,将当前适应度值变为历史最好适应值。
[0034]
记种群经历过的最优位置为gbest,即全局历史最优。对于每个粒子,将其历史最好适应值与整个种群中或邻域中所经历的历史最好位置的适应值相比较,如果更好就将历史最好适应值作为当前全局极值。
[0035]
随后,更新粒子位置和速度,生成随机数rand1和rand2[0036][0037]
进而判断是否满足停止条件,如果达到最大迭代次数或满足下式,
[0038][0039]
则结束,否则重复迭代过程。
[0040]
本发明利用数据链测距提出一种基于全连通网络结构的三领队低成本无人飞行器编队协同定位方法,通过集中式的通信结构和无向全连通的数据链测距,编队中的高性能无人飞行器可通过最优化方法解算编队成员位置信息并通过网络进行传递、更新。
[0041]
本发明设计的协同定位方法可与多种编队控制或协同制导方法配合使用,可通过选取合适算法提升非线性协同定位方程的求解速度和求解精度,类似的方法尚未见报道,属于原始理论创新,附加优势可通过本发明的实践获得。
附图说明
[0042]
为便于理解和描述,给出框架构建示意图并结合实施方式对其进行解释。
[0043]
图1是三领队异质无人飞行器编队领从数据链通信的基础结构。
[0044]
图2是三领队异质无人飞行器编队数据链通信示意图。
[0045]
图3是三领队-4低成本无人飞行器异质编队实时位置状态。
[0046]
图4是协同定位解算结果在x-y平面上的位置投影。
[0047]
图5是协同定位解算结果在x-z平面上的位置投影。
[0048]
图6是三领队异质无人飞行器编队协同定位适应度曲线。
具体实施方式
[0049]
本发明中提出一种基于全连通网络的三领队低成本无人飞行器编队协同定位方法,首先在确定三领队异质编队编队状态信息的基础上构建编队通信网络,后结合数据链测距构建并解算协同定位非线性方程组从而获得无人飞行器位置,用于后续编队协同制导。下面详细描述本发明的实施例,所述实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
[0050]
本实例按照本发明方法设计的协同定位方法实现3领队-4低成本无人飞行器异质无人飞行器编队协同定位。
[0051]
下面给出本文实例中待估计低成本无人飞行器的精确位置信息如下:
[0052]
低成本无人飞行器
ꢀꢀ
f4当前真实位置
ꢀꢀ
(1200m,1200m,221m);
[0053]
低成本无人飞行器
ꢀꢀ
f5当前真实位置
ꢀꢀ
(2100m,1200m,1012m);
[0054]
低成本无人飞行器
ꢀꢀ
f6当前真实位置
ꢀꢀ
(1600m,2100m,1123m);
[0055]
低成本无人飞行器
ꢀꢀ
f7当前真实位置
ꢀꢀ
(2000m,1500m,1828m)。
[0056]
结合领队无人飞行器信息、低成本无人飞行器惯导测量信息和数据链测距飞行器间距并根据本发明给出的3领队-4低成本无人飞行器异质无人飞行器编队协同定位方法进行验证如下:
[0057]
步骤一、三领队异质无人飞行器异质编队信息获取
[0058]
高新能领队装配高精度导航系统,自身位置精确可知如下:
[0059]
领队
ꢀꢀ
m1当前位置
ꢀꢀ
(2000m,4000m,3500m);
[0060]
领队
ꢀꢀ
m2当前位置
ꢀꢀ
(3000m,4500m,3000m);
[0061]
领队
ꢀꢀ
m3当前位置
ꢀꢀ
(4000m,3400m,4000m)。
[0062]
低性能低成本无人飞行器装配低精度惯性导航系统,测量位置存在惯组漂移误差me<200m:
[0063]
低成本无人飞行器
ꢀꢀ
f4当前测量位置
ꢀꢀ
(1219.7m,1235.6m,2238.3m)
[0064]
低成本无人飞行器
ꢀꢀ
f5当前测量位置
ꢀꢀ
(2085.7m,1234.7m,1018.4m)
[0065]
低成本无人飞行器
ꢀꢀ
f6当前测量位置
ꢀꢀ
(1632.4m,2168.9m,1195.0m)
[0066]
低成本无人飞行器
ꢀꢀ
f7当前测量位置
ꢀꢀ
(2000.0m,1516.3m,1829.2m)
[0067]
步骤二、构建三领队无人飞行器编队网络拓扑结构
[0068]
选取1号无人机为中心节点通过网络通信集合已有信息进行协同定位解算并发送解算结果。
[0069]
构建领从关系,低成本无人飞行器均与三个领队连通,在此基础上构建低成本无人飞行器全连通网络。通过数据链测距获取基础结构3个高性能无人机和3个低成本无人机之间的相对值位置关系如下
[0070]
低成本无人飞行器与领队m1数据链测距信息
[0071]r41
=3179.91m,r
51
=3746.79m,r
61
=3069.24m.
[0072]
低成本无人飞行器与领队m2数据链测距信息
[0073]r42
=3838.73m,r
52
=3956.64m,r
62
=3353.15m。
[0074]
低成本无人飞行器与领队m3数据链测距信息
[0075]r43
=3980.82m,r
53
=4168.36m,r
63
=3965.78m。
[0076]
全连通低成本无人飞行器之间的数据链测距信息
[0077]r54
=1506.79m,r
64
=1475.34m,r
65
=1036.26m。
[0078]
在此基础上确定7号低成本无人机需与1号双向通讯,同时7号无人机与2,3,5号无人机进行通信即有数据链测距
[0079]r71
=3007.56m,r
72
=3372.54m,r
73
=3510.78m,r
75
=874.18m。
[0080]
步骤三、建立三领队异质无人飞行器编队协同定位方程组
[0081]
x=[x
f4
,y
f4
,z
f4
,x
f5
,y
f5
,z
f5
,x
f6
,y
f6
,z
f6
,x
f7
,y
f7
,z
f7
]建立协同定位方程组如下
[0082][0083]
并根据协同定位方程组构建和优化代价函数表达式。
[0084]
步骤四、基于惯组测量信息的协同定位解算
[0085]
首先,初始化参数。
[0086]
设置参数种群数s=200,粒子最大速度v
max
=150,迭代次数上限maxiter=500,学习因子c1=c2=1.8,权重上下界w
max
=0.8,w
min
=0.3。
[0087]
其次,计算每个粒子的适应度。
[0088]
随后,更新粒子位置和速度。
[0089]
进而判断是否满足停止条件,如果达到最大迭代次数或满足最小界限er=5,er=1则结束,否则重复迭代过程。
[0090]
迭代次数156次,导到协同定位结果如下:
[0091]
低成本无人飞行器f4协同定位解算位置(1198.53m,1200.78m,2221.76m),测量误差43.99m,位置误差1.832m。低成本无人飞行器f5协同定位解算位置(2099.40m,1198.56m,1013.94m),测量误差38.95m,位置误差2.486m。低成本无人飞行器f6协同定位解算位置(1599.89m,2099.91m,1123.08m),测量误差104.84m位置误差0.163m。低成本无人飞行器f7协同定位解算位置(2000.20m,1499.61m,1828.62m),测量误差16.69m,位置误差0.761m。
[0092]
根据集中式通信结构,选定通信链路将结算结果传递至无人飞行器编队中的各无人飞行器更新位置信息。
[0093]
图3为三领队-4低成本无人飞行器异质编队实时位置图。图4协同定位解算结果在x-y平面上的位置投影。图5是协同定位解算结果在x-z平面上的位置投影。图6是三领队异质无人飞行器编队协同定位适应度曲线。图4和图5中,以惯组测量位置为圆心,惯组误差漂移误差最大值为半径画定搜索圆,在每一个圆中搜索低成本无人飞行器位置。根据惯组测量位置信息和惯组误差范围结合粒子群算法进行搜索,当误差满足设定界限时,即停止搜索得到协同定位解算位置信息,结果满足停止条件,定位精度小于3m,协同定位效果良好。本方法提供的位置信息能够通过网络通信实现基于惯性导航系统的低性能无人飞行器编队的协同定位,为编队协同作战提供了良好的信息基础。
[0094]
该实施案例是对本发明技术方案的解释和说明,仅作示例,以验证三领队无人飞行器编队协同定位方法的有效性,不能以此限定权利保护范围。对于本领域技术人员来说,可在本技术的三领队高低配无人飞行器编队协同定位方法的基础上根据工程实践需求进行若干变化、修改、替换、变型和改进。凡根据本发明权利要求书和说明书所做的仅仅是局部改变的,仍应属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。