1.本发明涉及检测技术领域,更确切地说,它涉及一种大规模光伏组件表面减反膜层自动检测方法。
背景技术:
2.随着光伏发电技术的不断进步、发电成本的持续下降,光伏发电已成为能源行业投资新宠。光伏组件占地面光伏系统初始成本的40%左右,且光伏组件缺陷可直接影响发电收益。组件表面减反膜层脱落是较为普遍的组件缺陷,在镀减反射膜组件经受着长期的户外考验后,沙尘、雨水、有机污染物等都会逐步侵蚀玻璃表面的中空sio2减反射膜层,造成减反射作用的逐步丧失,发电量下降比例可能超过3%。光伏组件的工作寿命可长达25年以上,但与玻璃一起高温烧结制备的减反射膜层无法匹配光伏组件的生命周期,安装5年以上的光伏组件有相当高比例已经存在膜层脱落的问题,因此需要一种高效的全站组件膜层评估方法,精准评估组件膜层状况以确定是否需要重新镀膜及需要重新镀膜的区域。
3.对光伏电站的组件表面减反膜的检测,通常采用便携式分光光度计设备进行接触式测量,但存在组件检测数量极大,安装高度及地形多样导致无法取样测试等难题。
技术实现要素:
4.本发明的目的是克服现有技术中的不足,提供了一种大规模光伏组件表面减反膜层自动检测方法,所述技术方案如下:
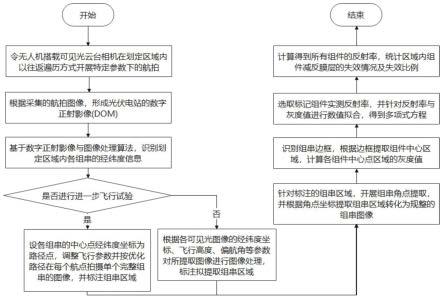
5.步骤1、令无人机搭载可见光云台相机在划定区域内开展特定参数下的航拍;
6.步骤2、根据采集的航拍图像,形成光伏电站的数字正射影像;
7.步骤3、基于数字正射影像与图像处理算法,识别划定区域内各组串的经纬度信息;
8.步骤4、对组串区域进行标注;
9.步骤5、依次针对标注的组串区域开展组串角点提取,并根据角点坐标提取组串区域转化为规整的组串图像;
10.步骤6、识别规整组串图像的组件边框,提取规整组串图像中的组件中心区域,计算各组件中心点区域的灰度值;
11.步骤7、根据组件灰度值及分布情况,选定标记组件,并检测标记组件的反射率,根据标记组件的灰度值、组件分布情况、图像拍摄参数及反射率值,计算得到组件反射率的关系函数;
12.步骤8、根据所述关系函数,计算其余所有光伏组件的反射率值,并统计划定区域内组件减反膜层的失效情况。
13.作为优选,步骤1中,所述划定区域为光伏电站全域或光伏电站任一部分区域;所述特定参数包括:无人机的飞行高度、航向重叠率和旁向重叠率;所述飞行高度由光相机焦距、传感器尺寸、光伏组串的尺寸综合确定;所述航向重叠率和所述旁向重叠率的取值范围
为 50%~90%。
14.作为优选,步骤3包括:
15.步骤3.1、在数字正射影像中获取若干个特征点的经纬度坐标;
16.步骤3.2、结合特征点的经纬度坐标与xy模型坐标,得到xy模型坐标与经纬度坐标的转换公式;
17.步骤3.3、得到划定区域内各组串的经纬度坐标。
18.作为优选,步骤3中,所述图像处理算法包括阈值分割算法、颜色空间转换算法、连通区域分析算法和图像形态处理算法;所述图像处理算法用于实现光伏组串区域与背景区域的分离,以及读取各组串的中心点xy模型坐标。
19.作为优选,步骤4包括:
20.步骤4.1、判断是否进行进一步飞行试验,若不进行进一步飞行试验则执行步骤4.2,若进行进一步飞行试验则执行步骤4.3;
21.步骤4.2、根据可见光图像的经纬度坐标、飞行高度、偏航角等参数对所述可见光图像进行图像处理,标注拟提取组串区域;
22.步骤4.3、设各组串的中心点经纬度坐标为路径点,调整飞行参数并按优化路径在每个航点拍摄单个完整组串的图像,并标注组串区域。
23.作为优选,步骤5中,所述组串角点通过人工或自动提取算法提取,所述自动提取算法包括:阈值分割算法、边缘检测算法和边缘形态监测算法。
24.作为优选,步骤6中,所述组件边框通过人工或自动识别算法识别,所述自动识别算法包括:阈值分割算法和图像形态处理算法;识别所述组件边框将组串图像分割成若干个组件区域。
25.作为优选,步骤6中,所述各组件中心点区域的灰度值为各组件中心区域内除栅线区域外所有像素点灰度值的平均值。
26.作为优选,步骤7中,所述标记组件根据划定区域内各组件的平均灰度值及分布情况选取,选取的标记组件平均分布于划定区域且平均灰度值平均分布于灰度区间,所述灰度区间包括高灰度区间、中灰度区间和低灰度区间。
27.作为优选,步骤8中,所述关系函数通过数值拟合或模糊逻辑确定;所述统计划定区域内组件减反膜层的失效情况包括:汇总划定区域内所有组件的反射率值信息,设定失效阈值 t;组件反射率大于等于t,即认为该组件的减反膜层失效;统计区域内组件减反膜层的失效情况,计算得到划定区域内所有光伏组件的减反膜失效比例。
28.本发明的有益效果是:本发明可在短时间内完成光伏电站组件表面减反膜层反射率的精准检测,全面评估光伏电站组件膜层性能,提升了检测效率和检测精确度。
附图说明
29.图1为本技术提供的一种大规模光伏组件表面减反膜层自动检测方法的流程图;
30.图2为本技术提供的规整组串提取示意图;
31.图3为本技术提供的光伏组件中心区域提取示意图。
具体实施方式
32.下面结合实施例对本发明做进一步描述。下述实施例的说明只是用于帮助理解本发明。应当指出,对于本技术领域的普通人员来说,在不脱离本发明原理的前提下,还可以对本发明进行若干修饰,这些改进和修饰也落入本发明权利要求的保护范围内。
33.实施例1:
34.一种大规模光伏组件表面减反膜层自动检测方法,包括:
35.步骤1、令无人机搭载可见光云台相机在划定区域内开展特定参数下的航拍;
36.步骤2、根据采集的航拍图像,形成光伏电站的数字正射影像;
37.步骤3、基于数字正射影像与图像处理算法,识别划定区域内各组串的经纬度信息;
38.步骤4、对组串区域进行标注;
39.步骤5、依次针对标注的组串区域开展组串角点提取,并根据角点坐标提取组串区域转化为规整的组串图像;
40.步骤6、识别规整组串图像的组件边框,提取规整组串图像中的组件中心区域,计算各组件中心点区域的灰度值;
41.步骤7、根据组件灰度值及分布情况,选定标记组件,并检测标记组件的反射率,根据标记组件的灰度值、组件分布情况、图像拍摄参数及反射率值,计算得到组件反射率的关系函数;
42.步骤8、根据关系函数,计算其余所有光伏组件的反射率值,并统计划定区域内组件减反膜层的失效情况。
43.步骤1中,划定区域为光伏电站全域或光伏电站任一部分区域;特定参数包括:无人机的飞行高度、航向重叠率和旁向重叠率;飞行高度由光相机焦距、传感器尺寸、光伏组串的尺寸综合确定,以每一张照片能完整拍摄支架为宜;航向重叠率和旁向重叠率的取值范围为 50%~90%。
44.步骤2中,数字正射影像可借助三维/二维模型建立软件形成,比如,smart3d、pix4d、大疆智图等。
45.步骤3包括:
46.步骤3.1、在数字正射影像中获取若干个特征点的经纬度坐标;
47.步骤3.2、结合特征点的经纬度坐标与xy模型坐标,得到xy模型坐标与经纬度坐标的转换公式;
48.步骤3.3、得到划定区域内各组串的经纬度坐标。
49.步骤3中,图像处理算法包括阈值分割算法、颜色空间转换算法、连通区域分析算法和图像形态处理算法;图像处理算法用于实现光伏组串区域与背景区域的分离,以及读取各组串的中心点xy模型坐标。
50.需要说明的是,在步骤3之后,根据是否进行进一步飞行试验分成两种提取方法。若因试验条件限制无法对划定区域进行进一步试验,则根据拟提取组串的经纬度匹配最相近的可见光图像,并对该可见光图像进行进一步图像处理,通过结合组串经纬度、可见光图像中心点经纬度、飞行高度、偏航角等参数在匹配的可见光图像中标注出拟提取组串的区域;若试验条件允许重复试验,则设各组串的中心点经纬度坐标为路径点,按照优化路径规
划方法进行路径优化,令无人机按照优化的路径及设定的偏航角、飞行高度进行航点飞行,在各航点进行悬停、拍照等操作。所述的路径规划方法包括蚁群算法、遗传算法、粒子群算法、离散生态共生算法等;设定的偏航角与飞行高度需保证在每一航点拍摄到完整组串的图像,并通过图像处理算法,将该组串区域部分进行标注;所述图像处理算法包括阈值分割法、颜色空间转换、连通区域分析法、语义分割法等;因此,步骤4包括:
51.步骤4.1、判断是否进行进一步飞行试验,若不进行进一步飞行试验则执行步骤4.2,若进行进一步飞行试验则执行步骤4.3;
52.步骤4.2、根据可见光图像的经纬度坐标、飞行高度、偏航角等参数对可见光图像进行图像处理,标注拟提取组串区域;
53.步骤4.3、设各组串的中心点经纬度坐标为路径点,调整飞行参数并按优化路径在每个航点拍摄单个完整组串的图像,并标注组串区域。
54.步骤5中,组串角点通过人工或自动提取算法提取,自动提取算法包括:阈值分割算法、边缘检测算法和边缘形态监测算法。
55.步骤6中,组件边框通过人工或自动识别算法识别,自动识别算法包括:阈值分割算法和图像形态处理算法;识别组件边框将组串图像分割成若干个组件区域,比如m
×
n个组件区域。示例地,识别出的组串边框横坐标为sx(i),i=1,2,m,m 1,组串边框纵坐标为sy(j),i= 1,2,n,n 1;所提取的各组件中心区域的顶点坐标如下,lt=[sx(i) α,sy(j) α],rt= [sx(i 1)-α,sy(j) α],lb=[sx(i) α,sy(j 1)-α],rb=[sx(i 1)-α,sy(j 1)-α], 其中i=1,2,
…
m,j=1,2,
…
n,α为组件边框向组件内部的像素值,可根据实际情况选取。
[0056]
步骤6中,各组件中心点区域的灰度值为各组件中心区域内除栅线区域外所有像素点灰度值的平均值。
[0057]
步骤7中,标记组件根据划定区域内各组件的平均灰度值及分布情况选取,选取的标记组件平均分布于划定区域且平均灰度值平均分布于灰度区间,灰度区间包括高灰度区间、中灰度区间和低灰度区间。
[0058]
步骤8中,关系函数通过数值拟合或模糊逻辑确定;统计划定区域内组件减反膜层的失效情况包括:汇总划定区域内所有组件的反射率值信息,设定失效阈值t;组件反射率大于等于t,即认为该组件的减反膜层失效;统计区域内组件减反膜层的失效情况,计算得到划定区域内所有光伏组件的减反膜失效比例。
[0059]
实施例2:
[0060]
一种大规模光伏组件表面减反膜层自动检测方法,包括:
[0061]
步骤1、令m300rtk大疆无人机搭载h20t可见光云台相机在某光伏电站其中一地块以往返遍历方式开展航拍。
[0062]
在步骤1中,云台相机的35mm,焦距为47mm,分辨率为3888
×
5184,组串的长宽分别为 12m、4m,选择无人机飞行高度为60m,此时能完整拍摄组串,图像清晰度满足后续识别要求。设定航向重叠率及旁向重叠率均为80%。
[0063]
步骤2、收集采集的所有航拍图像,并利用大疆制图软件进行模型重建,生成该区域的数字正射影像(dom)。
[0064]
步骤3、基于数字正射影像与图像处理算法,识别划定区域内各组串的经纬度信息,具体步骤包括:
[0065]
步骤3.1、提取组串中心点模型坐标,包括:
[0066]
步骤3.1.1、将原图img(尺寸为3888
×
5184
×
3)转化为黑白标识图bw。首先将img 转化为hsv色彩空间,形成的单维度图像分别为h、s、v,利用otsu(大津)算法,确定h、s、 v图像的的灰度阈值分别为thh、ths和thv,遍历img中的像素点(i,j),各像素点1≤i≤ 3888,1≤j≤5184,如果h(i,j)》thh且v(i,j)》thv,同时img(i,j,1)、img(i,j,2)、和 img(i,j,3)不同时为零,则bw(i,j)=1,否则bw(i,j)=0。
[0067]
步骤3.1.2、去除bw图像中面积小于一定阈值th
region
的连通图形,此处取th
region
= 600。
[0068]
步骤3.1.3、填充bw图像中的空洞区域。
[0069]
步骤3.1.4、bw图像的每一连通图像的边界向内腐蚀某一特定形态,此处选择3
×
3矩形。
[0070]
步骤3.1.5、根据bw图像特征,确定图像中各组串的区域范围。
[0071]
步骤3.1.6、根据bw图像特征,确定图像中各组串的区域范围。
[0072]
步骤3.1.7、记录选定为组串区域的连通区域中心点的模型坐标。
[0073]
步骤3.2、确认经纬度坐标与模型坐标的转换公式。
[0074]
步骤3.2中,在模型中选取若干个特征点,结合特征点的经纬度坐标与模型坐标,得到模型坐标与经纬度坐标的线性转换公式。
[0075]
步骤3.3、进一步得到划定区域内各组串的经纬度坐标stringlatlng(k)= [latitude(k),longitude(k)],k=1,2,
…
stringnum,stringnum为划定区域内组串区域的总数量。
[0076]
步骤4、分别提取各组串的可见光图像,在可见光图像中标注出拟提取的组串区域,按照照片的经纬度进行图像提取及单组串区域图像提取,包括:
[0077]
步骤4.1、分别对各提取组串按经纬度坐标进行原图匹配,对于第k个组串,找到经纬度坐标最相近的可见光原图imgk,对可见光图像进行图像处理,包括:
[0078]
步骤4.1.1、读取拍摄该可见光图像的偏航角yaw(k),将imgk图像旋转-yaw(k)角度。
[0079]
步骤4.1.2、将imgk(尺寸为h
×w×
3)转化为hsv色彩空间,确定h、s、v各维度图像的灰度阈值分别为thh、ths和thv。
[0080]
步骤4.1.3、遍历imgk中像素点(i,j),1≤i≤h,1≤j≤w,如果h(i,j)》thh且s(i,j)》 ths,或者v(i,j)》thv,同时imgk(i,j,1),imgk(i,j,2),imgk(i,j,3),则bwk(i,j)=1,否则 bwk(i,j)=0。
[0081]
步骤4.1.4、去除bwk图像中面积小于一定阈值th
region
的连通图形,此处取th
region
= 1000。
[0082]
步骤4.1.5、bwk图像的每一连通图像的边界向外膨胀某一特定形态,此处选择3*3矩形。
[0083]
步骤4.1.6、填充bwk图像中的空洞区域。
[0084]
步骤4.1.7、bwk图像的每一连通图像的边界向内腐蚀某一特定形态,此处选择80*80矩形。
[0085]
步骤4.1.8、填充bwk图像中的空洞区域。
[0086]
步骤4.1.9、根据bwk图像特征,确定图像中各组串的区域范围。
[0087]
步骤4.1.10、记录各组串区域的中心点坐标stringxyk(t),t=1,2,
…
stringnumk, stringnumk,为imgk图像中组串的数量。
[0088]
步骤4.2、根据所提组串的经纬度、无人机离组串的距离、原图中心点经纬度,计算所提组串在imgk中的大致坐标xyk。
[0089]
步骤4.3、计算imgk中各组串中心点坐标与xyk的距离,距离最小的组串即为拟提取的组串stringk。
[0090]
步骤4.4、标注涵盖stringk组串的矩形区域partk。
[0091]
步骤5、针对标注的各矩形区域partk,k=1,2,
…
stringnum,分别开展组串角点提取,并根据角点坐标提取组串区域转化为规整的组串图像。组串角点提取算法步骤包括:
[0092]
步骤5.1、对矩形区域partk做边缘识别,示例地,采用“canny”算子进行边缘检测,并识别所检测出的边缘的凸包,凸包由bound(l)组成,l=1,2,
…
pointno,其中pointno为凸包中的点的个数。检测bound(l)相邻点的夹角,夹角大于某一设定阈值的认定为顶点,此例选择阈值为20
°
。识别出的顶点分别为lt,rt,rb,lb。
[0093]
步骤5.2、将lt,rt,rb,lb四个点与像素点[1,1],[1,1100],[400,1100],[400,1]形成映射关系,将组串区域通过该映射关系形成规整组串图像panelk,见图2所示。
[0094]
步骤6、对提取的各规整组串图像panelk(尺寸为k1
×
k2,k=1,2,
…
stringnum),分别开展组件边框的识别,识别流程包括:
[0095]
步骤6.1、将panelk图像转化为灰度图像panelgk(k1
×
k2),遍历panelgk上各像素点,若灰度值大于gray
th
,则令该像素点的值为1,否则为0,此处gray
th
=200。
[0096]
步骤6.2、统计各列、各行像素点为1的值,分别为tx(i),ty(j),i=1,2,
…
k1,j= 1,2,
…
k2。
[0097]
步骤6.3、若tx(i)》thx,且与前一满足条件的i值相差大于β,则确认i为组串边框的横坐标;若ty(j)》thy,且与前一满足条件的j值相差大于β,则确认j为组串边框的纵坐标。此处 thx=0.2k1,thy=0.2k2,β=20。由此识别到的组串边框横坐标为sx(i),i=1,2,m,m 1, 组串边框纵坐标为sy(j),i=1,2,n,n 1,该组串中组件的排布方式为m
×
n。
[0098]
步骤6.4、提取组串中各组件中心区域如下,lt=[sx(i) α,sy(j) α],rt=[sx(i 1)-α,sy(j) α],lb=[sx(i) α,sy(j 1)-α],rb=[sx(i 1)-α,sy(j 1)-α],其中 i=1,2,
…
m,j=1,2,
…
n,α为组件边框向组件内部的像素值,提取的组件中心区域如图3所示。剔除组件中心区域中的栅线区域,即大于gl
th
的像素,此处取gl
th
=160。计算各组件中心区域除栅线区域外其余像素的平均灰度值
[0099]
步骤7、由于本实施例中组件分布情况一致性较高,仅根据组件灰度值进行标记组件的选取;将划定区域内所有的光伏组件根据平均灰度值(其中k=1,2,
…
stringnum,i= 1,2,
…
m,j=1,2,
…
n)划分为高/中/低灰度区间,在各灰度区间分别选取等量组件为标记组件,标记组件的平均灰度值分别为其中p=1,2,
…
markno,markno为标记组件的数量。
[0100]
步骤8、检测标记组件的反射率曲线,记录其在可见光区域内的反射率值rp(p= 1,2,
…
markno),由于本实施例中各图像的拍摄参数基本一致,仅计算平均灰度值与反射率
的灰度值,即将rp与值进行数值拟合,得到对应的多项式方程。
[0101]
步骤9、将其余所有光伏组件的值代入多项式方程计算,得到其余光伏组件的反射率值r_k
i,j
计算值。
[0102]
步骤10、汇总划定区域内所有组件的反射率r_k
i,j
值信息,设定失效阈值t,及r_k
i,j
≥t 即为失效。统计区域内组件减反膜层的失效情况,计算得到划定区域内所有光伏组件的减反膜失效比例。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
