1.本实用新型涉及电力工程技术领域,具体涉及一种架空地线修补机器人的压接式捋线装置。
背景技术:
2.架空地线是高压输电线路的重要组成部分,由于其所处环境恶劣,会发生外层导线断股、散股的情况,严重影响电网的运行。为了维持电网的稳定,需要对破损的地线进行修补,传统的人工修补方法,操作难度大,危险系数高,采用机器人代替人工进行修补任务可以提高效率并保证人员的安全。
3.目前已经存在少数具有修复能力的机器人,但是其中的捋线机构还存在以下问题:1. 修补能力不强,无法将散落导线进行入槽恢复;2. 动作次序复杂,工作耗时长;3. 无法进行加固处理,存在二次脱落的风险。
4.基于此,本案由此提出。
技术实现要素:
5.为解决上述问题,本实用新型的目的在于提供一种架空地线修补机器人的压接式捋线装置,捋线效果好,更适合实际应用。
6.一种架空地线修补机器人的压接式捋线装置,包括支架,支架上设有捋线装置和开合爪,其中:
7.所述捋线装置包括捋线盘和用于带动捋线盘做旋转运动的旋转驱动组件,所述捋线盘包括两半分圆环,两半分圆环组成的圆环的内径与架空地线规格相匹配;所述旋转驱动组件包括旋转齿轮,所述旋转齿轮包括两半分圆环,捋线盘的两半分圆环分别固定在旋转齿轮的两半分圆环上;
8.所述开合爪包括夹臂和开合爪驱动组件,所述夹臂包括爪一和爪二,旋转齿轮的两半分圆环分别滑动连接在爪一和爪二上,所述开合爪驱动机构用于带动爪一和爪二做开合运动。
9.进一步的,所述旋转驱动组件包括旋转电机和由旋转电机驱动的驱动齿轮,所述驱动齿轮与旋转齿轮啮合。
10.进一步的,所述开合爪驱动组件包括开合电机、由开合电机驱动的开合主动齿轮及与开合主动齿轮啮合的开合从动齿轮,所述爪一和爪二的一端均为半分圆环构造,爪一的另一端与开合主动齿轮配合实现开合动作,爪二的另一端与开合从动齿轮配合实现开合动作。
11.进一步的,所述爪一和爪二的半分圆环与旋转齿轮的两半分圆环之间通过滑轨滑槽构造实现滑动连接。
12.进一步的,所述支架的上部和下部错位并形成作业空间,所述捋线装置和开合爪设置在支架上部且位于作业空间内。
13.进一步的,所述开合爪的最大开合角度为180
°
。
14.进一步的,所述夹臂为双层构造,即爪一和爪二均有两个,两个所述爪一分别设置在旋转齿轮的两侧,两个所述爪二分别设置在旋转齿轮的两侧。
15.进一步的,包括压线装置,压线装置包括压接驱动电机和压接钳,所述压接驱动电机用于驱动压接钳做环握动作,所述压接钳内可存放压片,用于夹紧在架空地线断股处。
16.进一步的,所述捋线装置和开合爪具有两套。
17.本实用新型的优点在于:
18.1. 捋线盘能够旋转和开合,开合使得本实用新型装置能够夹在架空地线上,旋转使得该装置能够输出足够的力矩使散落的架空地线重新捋回线槽;捋线装置设置两组,可以应对不同方向的断线,作业更加灵活;
19.2. 支架上下错位设置形成一定作业空间,使夹臂能够从架空地线的侧方进行开合动作,增大了机身与架空地线之间的作业空间;
20.3. 压接装置能够输出足够的力矩,将压片牢固的压紧在断股处,加固效果更好,不会产生二次脱落现象。
附图说明
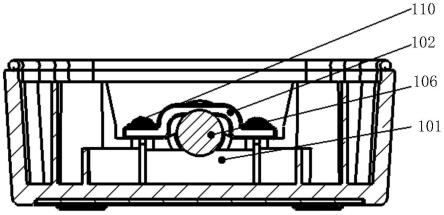
21.图1是本实用新型装置在实施例中的整体构造示意图;
22.图2是实施例中捋线装置的构造示意图;
23.图3是实施例中开合爪的构造示意图;
24.图4是实施例中夹臂与旋转齿轮之间的装配示意图;
25.图5是实施例中旋转齿轮与捋线盘之间的装配示意图;
26.图6是实施例中压接装置的构造示意图;
27.图7是图1的使用状态示意图;
28.标号说明
29.100-捋线装置;101-捋线盘;102-旋转电机;103-驱动齿轮;104-旋转齿轮;105-环形凸起;
30.200-开合爪;201-夹臂;202-开合驱动电机;203-开合主动齿轮;204-开合从动齿轮;205-爪一;206-爪二;207-环形凹槽;
31.300-压线装置;301-压接驱动电机;302-压接钳;
32.400-支架;500-架空地线。
具体实施方式
33.以下结合实施例对本实用新型作进一步详细描述。
34.如图1所示,本实施例提出一种架空地线修补机器人的压接式捋线装置100,包括捋线装置100、开合爪200、支架400以及压线装置300,其中捋线装置100和开合爪200通过支架400装配在一起,本实施例中的捋线装置100和开合爪200均设有两组,用于应对不同方向的散落导线。
35.如图2所示,捋线装置100包括捋线盘101、旋转电机102、驱动齿轮103和旋转齿轮104,其中:
36.捋线盘101由两半分圆环组成,两半分圆环在捋线作业时可通过开合动作夹在架空地线上,捋线盘101的圆环内径可根据架空地线的规格进行更换;
37.旋转电机102带动驱动齿轮103转动,驱动齿轮103带动与其啮合的旋转齿轮104转动,本实施例中,旋转齿轮104同样由两半分圆环组成,如图5所示,捋线盘101的两半分圆环通过螺钉固定的方式固定分别固定在旋转齿轮104的两半分圆环上,通过旋转齿轮104,可实现捋线盘101的转动;旋转齿轮104两半分圆环的设置可实现旋转齿轮104在捋线作业时的开合,旋转齿轮104的两半分圆环设有在拼合后咬合以实现同步转动的凹凸嵌合结构(该凹凸嵌合结构为现有技术,图中未示出)。
38.如图3所示,开合爪200包括夹臂201、开合驱动电机202、开合主动齿轮203和开合从动齿轮204。夹臂201包括形状相同的爪一205和爪二206,爪一205和爪二206的一端均为半分圆环构造,所述爪一205的另一端用于与开合主动齿轮203连接,实现开合主动齿轮203驱动爪一205动作,所述爪二206的另一端用于与开合从动齿轮204连接,实现开合从动齿轮204驱动爪二206动作;所述开合主动齿轮203和开合从动齿轮204尺寸相同且啮合,开合驱动电机202用于驱动开合主动齿轮203旋转,从而使得爪一205和爪二206同步反向转动,以此可实现夹臂201的开合。本实施例中,为保证捋线盘101开合的稳定性,夹臂201采用双层构造,即爪一205和爪二206均设有两个,如图4所示,装有捋线盘101的旋转齿轮104嵌套在双层夹臂201中,旋转齿轮104的侧面设有用作滑轨的环形凸起105,爪一205和爪二206的侧面设有用作滑槽的环形凹槽207,通过环形凸起105和环形凹槽207的配合,即实现旋转齿轮104带动捋线盘101在双层夹臂201内旋转,又可实现双层夹臂201通过旋转齿轮104带动捋线盘101的开合动作。本实施例中,开合爪200的最大开合角度为180
°
。
39.本实施例支架400的上部和下部错位并形成一定的作业空间,捋线装置100和开合爪200安装在支架400的上部并位于作业空间内,这样的设置使得夹臂能够从架空地线的侧方进行开合动作,增大了机身与架空地线之间的作业空间。
40.如图6所示,本实施例装置还包括压线装置300,压线装置300位于两组捋线装置100和开合爪200之间,压线装置300包括压接驱动电机301和压接钳302,所述压接驱动电机301用于驱动压接钳302做环握动作,所述压接钳302用于存放压片,作业时可夹紧在架空地线断股处,进行加固处理。
41.本实施例的工作流程如下所述:
42.选择合适规格的捋线盘101,将捋线盘101的两个半分圆环对应的安装在旋转齿轮104的两个半分圆环上,此时捋线盘101、旋转齿轮104、夹臂201均处于张开状态,此装置中还可设置零位传感器,标定此时旋转电机102的位置为零位。捋线作业时,开合驱动电机202驱动夹臂201闭合,使捋线盘101夹在架空地线上,之后旋转电机102驱动捋线盘101进行旋转,进行捋线。捋线结束后,旋转电机102停止,停止位置为零位传感器的零位,之后开合驱动电机202运行,打开捋线盘101,完成捋线作业。
43.上述实施例仅用于解释说明本发明的构思,而非对本发明权利保护的限定,凡利用此构思对本发明进行非实质性的改动,均应落入本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。