1.本发明涉及智能交通系统领域,尤其涉及一种基于车联网环境的动态单向交通控制系统。
背景技术:
2.目前对于单向交通控制及管理手段分为固定式单向交通控制、定时式单向交通控制、可逆式单向交通控制。针对双向两车道场景适用固定式单向交通控制和定时式单向交通控制,固定式单向交通控制即路段全时间执行某一个方向的单向交通通行方案适用全时段不均衡交通流,对缓解单方向交通流拥挤具有良好效果但不适用不均衡交通流方向变化的场景。定时式单向交通控制方案及采集路段过往交通数据聚类分析,当方向不均系数超过三分之二时段执行该方向的通行方案。该方法针对不均衡交通流时间分布规律的路段,提高了道路利用率,针对节假日博览会展开等突发因素造成不均衡交通时间分布不规律的场景,定时式单向交通控制不能检测到变化并实时响应对应的通行方向控制策略,造成切换方案与实际交通状况存在出入,路段延误增加,通行效率大幅度降低。并且方案切换考虑因素过少,将方向不均系数作为方案切换唯一参考,没有考虑延误车辆运行速度等诸多交通影响因素存在部分时间段切换方案与实际交通状况不匹配。
3.q-learning算法具有自学习、随机探索试错反馈、收敛速度快的特点,通过q-learning算法执行可变单向交通控制算法切换方案可将可变路段不同交通信息拟合为相应状态,并执行对应状态的切换方案,故针对切换方案采用 q-learning算法最为合适。模拟退火算法具有模型简单鲁棒性较强的特点可以解决复杂的线性优化相关问题,针对清空算法车辆到达分布不规律不易用模型建立的非线性问题,模拟退火算法可以更好解决,相比于强化学习中的贪心算法易获得全局最优解,不容易陷入局部收敛。
4.以双向两车道为主的老城区存在时间分布不规律的不均衡交通流,受限于道路通行能力限制不能满足通行需求,易造成老城区交通局部延误进而影响整体的通行效率。老城区道路规划宽度较窄,道路周边以商铺、老房子为主,改扩建手段去解决不太适用。通过交通控制手段是解决该问题的唯一方法,传统的定时式单向交通控制系统受限于非实时采集控制,针对节假日交通事故等造成不均衡交通流时间分布不规律的现象,预定时间设置的切换方案与实际交通流分布不一致,会造成交通局部延误加重,整体路网通行效率降低。对于单向交通方案切换的过渡车道清空时间控制,其一是通过固定清空时间执行,其二是通过摄像机人工经验观察进行车道清空。这两种切换方案过渡清空方法都不能及时满足车辆清空需求。据此,新的切换方案需要解决在时间分布不规律的不均衡交通流场景下传统定时式单向交通采集及方案切换不及时,切换方案与实际交通流不匹配的问题。过渡清空方案需要解决传统清空方法造成清空时间浪费,以及不能及时满足清空需求的问题。
技术实现要素:
5.本发明的目的在于提供一种基于车联网环境的动态单向交通控制系统,解决背景
技术中存在的技术问题。可以实时检测双向两车道路段不均衡交通流并控制单向交通通行方向,集通行方向切换和过渡方案车辆清空为一体,涉及车联网技术、传感器技术、自动控制技术、区块链技术的一种单向交通控制系统。
6.通过智慧路灯、v2x路侧设备与车辆内在的多种传感器交互,将车辆信息以及路况信息通过eos大数据区块链存储技术保存并传输到切换控制系统,切换控制系统中的q-learning算法计算生成方向切换方案,经过滚动切换因子方法优化最终生成实际通行方向切换方案。针对方案切换过渡的路段车辆清空过程,运用模拟退火车道清空算法将可变路段划分为多个区域,通过过往交通数据将可变路段划分区域,并分区域进行模拟退火清空训练生成各区域的最优清空方案,实际交通执行清空方案时,将过渡清空时间中路段交通分布拟合为对应区域的关键状态并执行相应的清空方案。
7.该切换方法实现实时采集实时切换,方案切换点与不均衡交通流时间变化点相近,具有实时检测、准确率高的特点。针对切换过程可变路段不同交通分布,可以判断生成与之最匹配的清空时间方案,降低了过渡方案清空时间所带来的时间延误。
8.为了实现上述目的,本发明采用的技术方案如下:
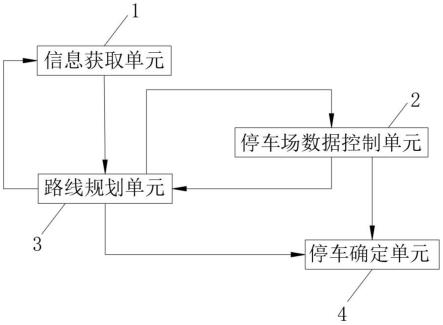
9.一种基于车联网环境的动态单向交通控制系统,包括交通信息采集子系统、执行子系统和数据存储子系统,交通信息采集子系统与执行子系统无线或者有线连接,交通信息采集子系统用于采集可变路段两端交通信息和可变路段车辆分布位置及速度信息,并经过执行子系统传给数据存储子系统,执行子系统对采集的数据进行训练得出执行方案,然后对执行方案进行执行,完成车道双向或者单向通行控制。
10.进一步地,交通信息采集子系统由若干个v2x路侧设备组成,若干个 v2x路侧设备设置在可变路段的侧边,并与执行子系统无线连接。
11.进一步地,每个v2x路侧设备包括交通信息采集传输存储模块,交通信息采集传输存储模块包括方案切换信息采集模块和过渡清空方案采集模块,方案切换信息采集模块通过lte-cv2x通讯方式与车辆内在的传感器进行无线通信交换,单位分钟步长获取一次可变路段两端进口交通量、运行速度、交通密度、平均排队长度的交通信息,将采集的信息进行分类标记传输至执行子系统,执行子系统将若干个v2x路侧上设备采集的交通信息汇总上传数据存储子系统,通过eos区块链存储技术进行存储,过渡清空方案采集模块通过卫星定位获取车辆在可变路段分布位置及车辆速度信息,每分钟获取一次,将获取的信息传输至可变路段的执行子系统进行汇总处理,最后上传数据存储子系统对应位置进行存储,将该数据作为切换、过渡清空方案训练样本及经验池,将切换方案以及可变路段过渡清空方案实时训练更新,保证切换方案、过渡清空方案与实际场景吻合,减少清空时间浪费。
12.进一步地,执行子系统有若干个智慧路灯组成,智慧路灯设置在可变路段上,每个智慧路灯包括动态单向交通通向方案切换模块和切换方案过渡清空模块,动态单向交通通向方案切换模块用于对交通数据归一化生成状态,查找该状态对应切换方案状态集最优切换方案,通过滚动切换因子优化切换方案并输出实际通行方向切换方案,切换方案过渡清空模块将可变路段的车流分布拟合为关键状态,提取进行训练,得到对应状态的最优清空方案并执行。
13.进一步地,动态单向交通通向方案切换模块包括双向通行切换单向子模块、单向切换双向子模块和切换方案训练模块,切换方案训练模块将区块链存入的往日交通数据作
为训练样本,对可变车道进口车辆平均排队长度、车辆密度、车辆平均停车次数分别进行状态集划分生成多维状态,通过归一化处理生成状态集。通过q-learning算法探索试错学习生成对应状态最优切换方案,最终将归一化后所有状态对应最优清空方案生成完毕即完成训练,双向通行切换单向子模块和单向切换双向子模块的控制流程为,首先切换方案训练模块将采集的平均排队长度、交通密度的多维交通信息进行降维归一化得到关键状态,查询切换方案训练模块中通过q-learning算法训练得到的该状态最优解并执行对应的切换方案,切换方案分为三种,正向单向通行、双向通行、反向单向通行,并用数字a,b,c表示,当生成切换方案,输入到滚动切换因子方法进行优化,实时获取连续5次的切换方案求和平均并四舍五入得到的值为实际切换方案,当获取次数小于五次不执行求和平均,降低由于车流淤积造成部分时间段生成的切换方案与实际交通流特性的不匹配。
14.进一步地,切换方案过渡清空模块包括车道清空方案训练模块和车道清空方案执行模块,车道清空方案训练模块将区块链存储的过往可变路段车辆位置信息作为训练样本,将可变路段划分为多个区域,车道清空的清空时间作为目标函数值,通过模拟退火算法分区域进行迭代训练,将清空时间减小作为熵量,最终生成对应状态的最优清空方案,车道清空方案执行模块将训练完成的最优清空方案部署到清空执行端,在方案切换过渡期间,将区块链中采集到的当前可变车道车辆位置信息换算为关键状态,并执行该状态所对应的最优清空方案,减少清空时间浪费。
15.基于车联网环境通过v2x路侧设备和车辆进行信息交互,并通过智慧路灯设备信息采集上传到区块链并通过e0s方法存储,相比于人工观察以及传统的交通设备信息采集并传入数据库存储,该采集传输方法具有采集数据多样,传输效率高的特点,且上传至区块链的数据,通过共识机制可以共享数据到其他相关部门增加了数据的互通性。由于上传的数据同时共享至多方部门且该数据不可更改,保证了数据的真实有效性。通过eos区块链存储和 bft-dpos共识机制方法,可以降低由于大量数据上传数据链路增加,导致传输效率降低的状况。由于区块链技术存在多副本保存,相对于传统数据库保存存在数据丢失风险,该方法保证了交通数据的安全性。
16.动态单向交通通行方案切换模块中,通过区块链将单位分钟步长采集交通信息并输入切换模块,对交通数据归一化生成状态,查找该状态对应切换方案状态集最优切换方案,通过滚动切换因子优化切换方案并输出实际通行方向切换方案。传统的人为观测不均衡交通流并进行切换方向调整,该方法节省人力可以实现自动检测实时控制,降低人力成本。相比定时式单向交通控制方法,动态单向交通通行方案切换模块具有实时检测实时调整,针对潮汐交通流早晚高峰等规律性不均衡交通流实时检测精度更高,交通流时间变化点与方案切换时间更加精准。针对节假日交通拥堵等外部条件造成不均衡交通流时间分布不规律的问题,定时式单向交通根据过往数据聚类分析生成的切换方案时间分布,与实际交通交通需求存在较大出入,造成交通需求与切换方案不匹配。通过动态单向交通通信方案模块可以实时检测到交通流变化并生实时成对应的切换方案,在规律性不均衡相比传统定时单向交通控制检测精度更高。在定时式单向交通控制方案无法应对的时间分布不规律的不均衡交通流场景,该方法可以实时检测到变化并生成相对应的切换方案具有实时性,强适应性,检测精度高的特点。
17.切换方案过渡清空模块中,将可变路段的车流分布拟合为关键状态,提取训练模
块中对应状态的最优清空方案并执行。相比传统单向交通过渡清空方案通过摄像机人为观测或执行固定清空时间作为行驶方向切换的过渡方案,通过摄像机人为执行切换存在观测车辆距离摄像机较远没有观测到的进而提前执行切换方案造成行车安全隐患,且观测路段过多导致切换不及时。固定清空时间方案会造成大量清空时间浪费,进而造成进口道交通延误,整体通行效率降低。模拟退火车道清空算法通过车辆定位、v2x路侧设备获取可变路段内车辆位置信息拟合为关键状态信息,生成与当前可变路段交通分布相匹配最优清空方案,杜绝了由于人为观测导致可变路段车辆未清空完毕的场景,以及固定清空方案造成的清空时间浪费,降低过渡方案清空时间造成进口交通延误提高通行效率。
18.本发明由于采用了上述技术方案,具有以下有益效果:
19.(1)本发明交通信息采集方面,针对传统的采集方式、信息上传、信息存储进行改进。交通信息采集部分通过v2x路侧设备与车辆信息交互通过智慧路灯将信息汇总并分类上传区块链,采用eos大数据存储方式对传统由于存储空间过小不适用大交通信息存储的区块链链式存储方式进行改进,通过 eos区块链数据存储方式和bft-dpos共识机制可以提高交通数据存储速度及存储容量,满足实时传输存储且交通数据量大的需求。
20.(2)单向交通方案切换方面,将交通密度、平均排队长度、运行速度等交通参数作为约束,实时性和方案选择准确性作为优化目标,利用q-learning 算法与滚动交通切换因子方法形成优化切换模型。在规律性不均衡交通流相比传统定时单向交通控制检测精度更高。在定时式单向交通控制方案无法应对的时间分布不规律的不均衡交通流场景,该方法可以实时检测到变化并生成相对应的切换方案具有实时性,强适应性,检测精度高的特点。
21.(3)过渡清空方面,以完成清空、当前清空时间小于上周期作为约束条件,将可变路段划分为多个区域,以各区域对应车辆清空时间最短作为优化目标,通过模拟退火清空算法迭代训练分区域生成清空最优方案。该方法杜绝了由于人为观测导致可变路段车辆未清空完毕的场景,以及固定清空方案造成的清空时间浪费,降低过渡方案清空时间造成进口交通延误提高通行效率。
附图说明
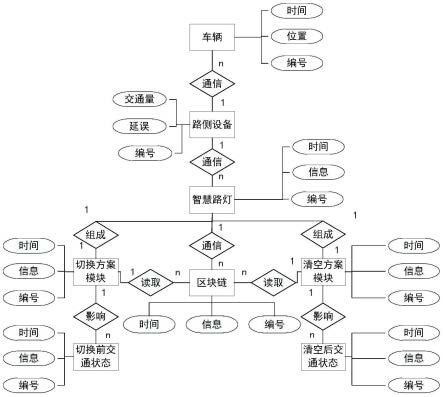
22.图1是本发明动态单向交通控制系统er图;
23.图2是本发明动态单向交通控制流程图;
24.图3是本发明q-learning车道切换算法流程图;
25.图4是本发明模拟退火车道清空算法流程图;
26.图5是本发明动态单向交通控制系统功能流程图;
27.图6是本发明滚动切换因子方法流程图;
28.图7是本发明清空方案状态划分。
具体实施方式
29.为使本发明的目的、技术方案及优点更加清楚明白,以下参照附图并举出优选实施例,对本发明进一步详细说明。然而,需要说明的是,说明书中列出的许多细节仅仅是为了使读者对本发明的一个或多个方面有一个透彻的理解,即便没有这些特定的细节也可以实现本发明的这些方面。
30.如图4所示,一种基于车联网环境的动态单向交通控制系统,包括交通信息采集子系统、执行子系统和数据存储子系统,交通信息采集子系统与执行子系统无线或者有线连接,交通信息采集子系统用于采集可变路段两端交通信息和可变路段车辆分布位置及速度信息,并经过执行子系统传给数据存储子系统,执行子系统对采集的数据进行训练得出执行方案,然后对执行方案进行执行,完成车道双向或者单向通行控制。
31.本发明实施例中,交通信息采集子系统由若干个v2x路侧设备组成,若干个v2x路侧设备设置在可变路段的侧边,并与执行子系统无线连接。
32.本发明实施例中,每个v2x路侧设备包括交通信息采集传输存储模块,交通信息采集传输存储模块包括方案切换信息采集模块和过渡清空方案采集模块,方案切换信息采集模块通过lte-cv2x通讯方式与车辆内在的传感器进行无线通信交换,单位分钟步长获取一次可变路段两端进口交通量、运行速度、交通密度、平均排队长度的交通信息,将采集的信息进行分类标记传输至执行子系统,执行子系统将若干个v2x路侧上设备采集的交通信息汇总上传数据存储子系统,通过eos区块链存储技术进行存储,过渡清空方案采集模块通过卫星定位获取车辆在可变路段分布位置及车辆速度信息,每分钟获取一次,将获取的信息传输至可变路段的执行子系统进行汇总处理,最后上传数据存储子系统对应位置进行存储,将该数据作为切换、过渡清空方案驯练样本及经验池,将切换方案以及可变路段过渡清空方案实时训练更新,保证切换方案、过渡清空方案与实际场景吻合,减少清空时间浪费。
33.本发明实施例中,执行子系统有若干个智慧路灯组成,智慧路灯设置在可变路段上,每个智慧路灯包括动态单向交通通向方案切换模块和切换方案过渡清空模块,动态单向交通通向方案切换模块用于对交通数据归一化生成状态,查找该状态对应切换方案状态集最优切换方案,通过滚动切换因子优化切换方案并输出实际通行方向切换方案,切换方案过渡清空模块将可变路段的车流分布拟合为关键状态,提取进行训练,得到对应状态的最优清空方案并执行。
34.本发明实施例中,动态单向交通通向方案切换模块包括双向通行切换单向子模块、单向切换双向子模块和切换方案训练模块,切换方案训练模块将区块链存入的往日交通数据作为训练样本,对可变车道进口车辆平均排队长度、车辆密度进行状态、车辆平均停车次数分别进行状态集划分生成多维状态,通过归一化处理生成状态集。通过q-learning算法探索试错学习生成对应状态最优切换方案,最终将归一化后所有状态对应最优清空方案生成完毕即完成训练,双向通行切换单向子模块和单向切换双向子模块的控制流程为,首先切换方案训练模块将采集的平均排队长度、交通密度的多维交通信息进行降维归一化得到关键状态,查询切换方案训练模块中通过q-learning算法训练得到的该状态最优解并执行对应的切换方案,切换方案分为三种,正向单向通行、双向通行、反向单向通行,并用数字a,b,c表示,当生成切换方案,输入到滚动切换因子方法进行优化,实时获取连续5次的切换方案求和平均并四舍五入得到的值为实际切换方案,当获取次数小于五次不执行求和平均,降低由于车流淤积造成部分时间段生成的切换方案与实际交通流特性的不匹配。
35.本发明实施例中,切换方案过渡清空模块包括车道清空方案训练模块和车道清空方案执行模块,车道清空方案训练模块将区块链存储的过往可变路段车辆位置信息作为训练样本,将可变路段划分为多个区域,车道清空的清空时间作为目标函数值,通过模拟退火算法分区域进行迭代训练,将清空时间减小作为熵量,最终生成对应状态的最优清空方案,
车道清空方案执行模块将训练完成的最优清空方案部署到清空执行端,在方案切换过渡期间,将区块链中采集到的当前可变车道车辆位置信息换算为关键状态,并执行该状态所对应的最优清空方案,减少清空时间浪费。
36.具体执行过程为:
37.如图1-7所示,交通信息采集传输存储模块通过单位间隔时间v2x路侧设备及(检测频率可变)lte-cv2x技术获取车载中控obd权限,进而获取可变路段车辆实际车速v1,v2,...vn、车载定位位置信息state1(x1,y1),state2,...state
n (切换方案过渡清空训练集,执行模块判断依据),通过v2x路侧设备同时获取可变路段进口平均排队长度、可变路段车辆密度等路况信息(动态单向交通通行方案切换模块切换依据),v2x路侧设备采集的交通信息传输至智慧路灯进行汇总分类,通过eos区块链存储技术bft-dpos共识机制对交通信息进行分类存储,该方法即拜占庭容错能力,当上传的交通信息存在错误即节点存在一定差错,可以容纳该错误不影响正常数据处理,加快数据信息处理传输,并且该机制基于最短路径广播传输,提高了交通信息上传效率,最终采集的交通信息作为动态单向交通行驶方向切换和过渡清空方案判断切换依据和训练数据集。
38.切换方案训练模块将过往该路口交通数据作为训练参数,规划当前周期采集的可变路段进口平均排队长度、可变路段车辆密度信息作为q-learning状态参数,交通密度k从0-40pcu/km划分为4个区,40pcu/km以上划分1个区并用k=(1,2,3,4,5)表示,平均排队长度论域[0,500]划分25个并用l=[1,2,...,25]表示。拟合为s={s(i,j,k,m)|k1=1,2...,5;k2=1,2...,5;l1=1,2,...,20;l2=1,2,...,20},其中s代表的状态参数共10000种,k1和l1代表正方向进口交通密度、平均排队长度,k2和 l2代表反方向交通密度、平均排队长度。动作集根据切换方式划分a={1,2,3}分别代表正向单向、双向、反向单向通行共三种。奖赏函数reward定义为一个切换方案执行后进口道平均延误相比之前方案是否降低,降低即为奖励值增加10反之奖励值减少10。并通过pursuit贪心策略进行动作选择即π
t
(a)=π
t
(a) β[0-π
t
(a)],其中π
t
(a)为在当前状态下选择动作a的概率,β为调节值且0<β<1,当其值越靠近1则收敛速度越快本方案取0.3,并对q值通过以下函数进行更新 q
t 1
(s
t
,a
t
)
←qt
(s
t
,a
t
) α[r
t
γmax
at 1qt 1
(s
t 1
,a
t 1
)-q
t
(s
t
,a
t
)]其中α代表学习率,当学习率过低会导致探索时间过长反之收敛过快未探索出最优解。γ代表奖励值折扣率随着迭代次数增加奖励值降低,最终通过迭代训练生成各状态的最大q 值作为切换方案。实际切换场景,切换方案决策模块获取该路段平均排队长度及交通密度并拟合成状态参数,通过调用过往q-learning生成的最优方案完成切换生成。由于路段滞留车辆会存在部分判断切换方案短时波动,生成的切换因子与实际交通流向存在一定出入,通过滚动切换因子方法采集连续五次的切换方案求和平均,四舍五入的得到结果作为实际切换方案,该方法提高了切换方案准确性,生成的实际切换方案与实际交通流向在时间上变化分布接近。
[0039]
当生成实际切换方案为了保证可变路段车辆运行安全,需要先清空可变路段上运行车辆再执行实际切换方案。针对方案切换过程中的车辆清空设计切换方案过渡清空模块,分为车道清空方案训练模块、车道清空方案执行模块两个子模块。车道清空训练模块通过模拟退火清空算法进行迭代训练最终生成对应状态的最优清空方案。分为可变路段区域
划分、模拟退火清空算法定义、模拟退火清空算法分区域训练、各区域最优清空方案生成。具体步骤如下,以可变单向交通控制路段的两条车道作为研究对象,对可变路段进行区域划分,为保证运行过程一个状态区域只容纳一辆车,考虑车种分布运行过程中设定最小车头间距7m,平均车辆长度7m,以14m为一个状态区域进行划分。s={s0,s1,s2...sn}共n 1个状态。si=1即i区域有车辆,si=0即i区域没有车辆;如果单方向多个状态si、sj、sk不等于0且i>j>k,则以状态位置数i为该路段的状态。清空方案状态s,以两个方向状态值不为零且两个方向最大状态位置数比较更大的那个作为最大的状态,即sm=1,sm作为东西方向关键状态;sn=1,sn为西东方向关键状态,如果n>m,则以sn为可变车道的关键状态。当可变路段无车辆运行则定义状态为s0。为保证清空方案在不同区域下顺利完成过渡清空方案,规定清空时间上限为距离进口最远区域顺利清空所有车辆并有足够的空余的时间,下限为距离进口最近区域最短清空时间。考虑的道路长度,和道路平均运行车速;将方案清空子集划分ω={1,2...m}, m为可变路段最大清空时间取决于可变路段时间长度。清空时间方案 f(ω)=5ω,初始模拟退火温度k
t
为2000℃,温度下降k
δt
=1℃,迭代次数为 2000次,目标函数f(ω)定义为清空时间,随机扰动rand=5,δf=f(ω
t2
)-f(ω
t1
) 其中f(ω
t2
)为当前周期完成清空时间,f(ω
t1
)为上周期完成清空时间。当δf≤0 则接受新解ω
t2
=ω
t1
,否则通过metropolis准则接受新解,即以概率接受新解,最终通过对n个区域进行模拟退火迭代训练生成各区域最优清空方案。当切换方案执行前,车道清空执行模块获取可变路段交通流分布,并拟合为关键状态,提取训练模块该状态对应清空时间,生成对应区域的最优清空方案并执行。
[0040]
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以作出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。