技术特征:
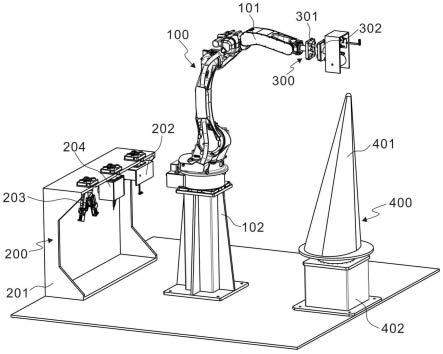
1.一种多工能复合材料预成型机器人制造单元,其特征在于:包括,机器人主体(100),包括机器人(101)、机器人底座(102),所述机器人(101)和所述机器人底座(102)固定连接;工具箱(200),包括工具箱外壳(201)、恒张力缠绕机构(202)、针刺机构(203),以及单边缝合机构(204),所述恒张力缠绕机构(202)、所述针刺机构(203)和所述单边缝合机构(204)均设置在所述工具箱外壳(201)上;连接机构(300),包括第一快速接头(301)和第二快速接头(302),所述第一快速接头(301)与所述机器人(101)前段连接,所述恒张力缠绕机构(202)、所述针刺机构(203)和所述单边缝合机构(204)上均设置有第二快速接头(302);预制体变位机构(400),包括预制体(401)和变位结构(402),所述预制体(401)与所述变位结构(402)连接。2.如权利要求1所述的多工能复合材料预成型机器人制造单元,其特征在于:所述恒张力缠绕机构(202)包括,缠绕机构外壳(202a)、缠绕机构连接法兰(202b)、线料仓(202c)、张紧器入线压板(202d),以及基座(202e),所述缠绕机构连接法兰(202b)、所述线料仓(202c)、所述张紧器入线压板(202d),以及所述基座(202e)均与所述缠绕机构外壳(202a)连接,且所述缠绕机构连接法兰(202b)与所述第二快速接头(302)连接。3.如权利要求2所述的多工能复合材料预成型机器人制造单元,其特征在于:其特征在于:所述张紧器入线压板(202d)中设置张紧器压紧海绵(202d-1),所述基座(202e)上设置有张紧轮(202e-1)、张紧大轮(202e-2)、张紧轮压力弹簧(202e-3)、张紧轮调节螺栓(202e-4),以及滑轮组(202e-5)。4.如权利要求1~3任一所述的多工能复合材料预成型机器人制造单元,其特征在于:所述针刺机构(203)包括,针刺机构连接法兰(203a)、针刺机构连接板(203b)、针刺气缸(203c)、剥网板气缸(203d)、剥网板(203e),以及针座(203f),所述针刺机构连接法兰(203a)与所述针刺机构连接板(203b)连接,且所述针刺机构连接法兰(203a)和所述第二快速接头(302)连接。5.如权利要求4任一所述的多工能复合材料预成型机器人制造单元,其特征在于:所述针刺机构连接板(203b)一侧设置有所述针刺气缸(203c),且所述针刺气缸(203c)与所述针座(203f)连接,所述针刺机构连接板(203b)另一侧设置有剥网板气缸(203d),且所述剥网板气缸(203d)与所述剥网板(203e)连接,所述针座(203f)上设置有刺针(203f-1)。6.如权利要求5所述的多工能复合材料预成型机器人制造单元,其特征在于:所述单边缝合机构(204)包括,单边缝合机构外壳(204a)、缝合机构连接法兰(204b)、第一曲柄(204c-1)、第二曲柄(204c-2)、连杆(204d)、针杆固定座(204e)、针杆(204f),以及同步带机构(204g),所述缝合机构连接法兰(204b)与所述单边缝合机构外壳(204a)和所述第二快速接头(302)连接,所述针杆固定座(204e)与所述单边缝合机构外壳(204a)固定连接,所述第一曲柄(204c-1)和所述第二曲柄(204c-2)均与所述连杆(204d)连接,所述连杆(204d)与所述针杆(204f)连接,所述针杆(204f)设置于所述针杆固定座(204e)内。7.如权利要求6所述的多工能复合材料预成型机器人制造单元,其特征在于:所述针杆(204f)包括,勾线针杆(204f-1)和引线针杆(204f-2),所述同步带机构(204g)包括第一齿轮(204g-11)、第二齿轮(204g-12)、第一同步带(204g-21)、第二同步带(204g-22)、第一同
步带齿轮(204g-31)、第二同步带齿轮(204g-32),以及第一伺服电机(204g-4),所述第一同步带齿轮(204g-31)与所述第一同步带(204g-21)连接,且所述第一同步带齿轮(204g-31)分别与所述第一曲柄(204c-1)和所述第一齿轮(204g-11)连接,所述第二同步带齿轮(204g-32)与所述第二同步带(204g-22)连接,且所述第二同步带齿轮(204g-32)与所述第二齿轮(204g-12)和所述第一伺服电机(204g-4)连接,所述第二齿轮(204g-12)与所述第二曲柄(204c-2)连接,所述第一齿轮(204g-11)与所述第二齿轮(204g-12)啮合。8.如权利要求6或7所述的多工能复合材料预成型机器人制造单元,其特征在于:所述第一快速接头(301)上设置有第一电接插头(301a)、第一电磁快接头(301b)、第一定位销(301c),以及第一气路接头(301d),所述第二快速接头(302)上设置有第二电接插头(302a)、第二电磁快接头(302b)、第二定位销(302c),以及第二气路接头(302d),所述第一电接插头(301a)可与所述第二电接插头(302a)连接,所述第一电磁快接头(301b)可与所述第二电磁快接头(302b)连接,所述第一定位销(301c)可与所述第二定位销(302c)连接,所述第一气路接头(301d)可与所述第二气路接头(302d)连接。9.如权利要求8所述的多工能复合材料预成型机器人制造单元,其特征在于:所述变位结构(402)包括,第二伺服电机(402a)、行星减速器(402b)、旋转台(402c),以及基座(402d),所述预制体(401)与所述旋转台(402c)连接。10.如权利要求9任一所述的多工能复合材料预成型机器人制造单元,其特征在于:所述第二伺服电机(402a)上连接有过渡法兰(402a-1),所述过渡法兰(402a-1)另一端与所述行星减速器(402b)连接,所述基座(402d)上设置有减速器法兰(402b-1),所述行星减速器(402b)连接在所述减速器法兰(402b-1)上,所述过渡法兰(402a-1)和所述减速器法兰(402b-1)连接,且所述行星减速器(402b)上连接有绝缘连接板(402b-2),所述绝缘连接板(402b-2)与所述旋转台(402c)连接。
技术总结
本发明公开了一种多工能复合材料预成型机器人制造单元,包括机器人主体、工具箱、连接机构,以及预制体变位机构。本发明所述机器人与缠绕、针刺、缝合机构的配合,将复合材料加工中的缠绕、缝合、针刺技术集成,以实现复合材料加工全自动化,替代传统人工缠绕、针刺、缝合等,提高加工效率,通过集成工艺可以提高工艺稳定性,实现设备智能化。实现设备智能化。实现设备智能化。
技术研发人员:蒋云 陈美琴
受保护的技术使用者:无锡云曰智能科技有限公司
技术研发日:2022.03.24
技术公布日:2022/7/1
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。