1.本发明涉及除尘设备领域,尤其涉及一种清洁机。
背景技术:
2.现有的负压清洁设备中,例如扫地机器人、手持式吸尘器等,其行进方向默认为设备的清洁方向,即清洁设备的清洁吸口均位于行进方向的前侧,当设备前进时清洁效果较好,而当设备反向移动时,往往除尘效果不佳。由于清洁过程中,很多时候会出现遗漏的杂物和灰尘,这就需要设备掉头重新自原有路线走一次,十分不便。
3.为此专利号为cn201210342193.x的中国发明专利就公开了一种《具有双吸口的吸尘器地刷》,该地刷在底座的前方和后方分别具有前吸口和后吸口,且在其进气口下游设有导流孔,上下风罩之间形成位于导流孔上游的气流吸尘通道。通过前后两个吸口的设置,解决了现有地刷后退无法清洁或者清洁效果不理想的问题。但是这种双吸口的设计仍具有一定的弊端。一方面后置吸口破坏了整个风道设计的原有结构,与后置吸口配合的吸尘通道会占用总吸风吸尘通道的吸风通量,影响前置吸口的吸尘效果;另一方面,后置吸口相对于前置吸口,仅仅是位置后移,而整机的离地间隙并未发生变化,前进时无法吸入的灰尘杂物,后退依然无法顺利地吸入。
4.专利号为cn200580004495.4的中国发明申请公开了一种《用于吸尘器的地面吸尘口》在该地刷在滚轮的前端和后端都设有档条,其前进或者后退,可以使对应的档条上移,进而使原本朝下的吸口,在前侧或者后侧形成侧缝,从而便于从侧缝处对地毯等不易除尘的位置进行前后移动的反复除尘。但是该吸尘口的上下变化设计,对地毯等柔性表面具有较好的吸尘效果,但是对于地面上的杂物吸尘效果不佳,依然不符合常规的除尘环境。
技术实现要素:
5.本发明所要解决的第一个技术问题是针对现有技术的现状,提供一种前进和后退时均能防止灰尘遗漏的清洁机。
6.本发明所要解决的第二个技术问题是针对现有技术的现状,提供一种能根据前进和后退状态主动切换机身在对应侧的高度以方便灰尘杂物被清洁的清洁机。
7.本发明所要解决的第三个技术问题是针对现有技术的现状,提供一种借助后退动能实现壳体后部抬高或者降低的清洁机。
8.本发明解决上述第一个技术问题所采用的技术方案为:该清洁机包括:
9.壳体,在清洁机行进方向的前侧具有开口朝下的吸尘腔,所述壳体底部与待清洁地面之间留有缝隙,以形成供灰尘进入吸尘腔的吸尘通道;
10.还包括有:
11.挡尘组件,包括两个相对布置在吸尘腔前后两侧的门板结构,各个门板结构的延伸方向与清洁机的行进方向相交叉;
12.致动件,设于所述壳体的底部且分别与各个门板结构驱动连接,并且,在所述清洁
机处于前进状态下,该致动件作用在两个门板结构上,以使吸尘腔前侧的门板结构处于打开状态而后侧的门板结构处于关闭状态,进而使所述吸尘通道的进口朝前;
13.在所述清洁机处于后退状态下,该致动件作用在两个门板结构上,以使吸尘腔前侧的门板结构处于关闭状态而后侧的门板结构处于打开状态,进而使所述吸尘通道的进口朝后。
14.为了确保清洁机在处于前进或者后退状态时,对应的门板结构都能打开或者关闭,优选地,所述门板结构包括定板和动板,所述定板布置在所述壳体底部,且所述动板至少局部位于所述壳体内,所述壳体在对应位置开设有供动板穿过的穿口。
15.具体地,所述定板上沿长度方向设有多个间隔布置的吸尘口,所述动板与所述定板并排布置且能沿定板的长度方向来回滑移,以同步打开或者关闭所述的吸尘口,进而使门板结构处于打开状态或者关闭状态。
16.为了确保致动件可以根据清洁机运动的方向来切换门板结构的状态,优选地,所述壳体内设有定位框,所述致动件前后滑移的容置在该定位框内,且至少局部外露于所述壳体,各所述门板结构的动板和致动件之间均对应设有连杆,在清洁机前进或者后退的状态下,所述致动件对应的向后或者向前滑移,进而带动对应的门板结构处于打开状态,而另外一个门板结构处于关闭状态。
17.为了进一步解决上述第二个技术问题,本发明所采用的技术方案为:该清洁机还包括有:
18.驱动轮,转动地连接在所述壳体上且转动轴线与清洁机的行进方向相垂直,且驱动轮被布置成能相对壳体上下移动;
19.调节机构,动力输出端与所述驱动轮驱动连接,并能在清洁机处于后退状态下作用在驱动轮上,以使所述驱动轮相对壳体向下移动、壳体的底壁自后向前向下倾斜,从而在所述壳体后侧的底壁与待清洁地面之间形成供杂物灰尘进入的第一间隙。
20.在所述壳体底部的两侧中,每一侧均设有一个滚轮,该滚轮邻近所述吸尘腔布置,以使所述清洁机在前进状态下,其底壁自前向后向下倾斜,从而在所述吸尘腔与待清洁地面之间形成第二间隙。
21.为了确保在驱动轮上下移动时形成导向,优选地,所述壳体在与驱动轮对应的位置开设有竖向延伸的轴孔,所述壳体内还设有相对所述壳体上下移动的连接座,该连接座具有能外露于所述轴孔的安装轴,所述驱动轮设于该安装轴上,并且,在所述清洁机处于后退状态下,所述调节机构的动力输出端作用在该连接座,并使该连接座带动安装轴、驱动轮同步向下移动。
22.上述驱动轮上下移动的动力可以是不同的形式,优选地,所述调节机构包括设于所述连接座上的电磁铁以及设于所述壳体内、并与所述电磁铁磁性配合的磁性件,所述磁性件布置在所述电磁铁的下方,且在所述清洁机处于后退状态下,所述电磁铁与所述磁性件相对的磁极为同性磁极。
23.为了进一步解决上述第三个技术问题,本发明所采用的技术方案为:还包括有用来将驱动轮的动能转化为电磁铁电能的电组件,所述电组件包括动力轮、线圈以及磁铁组,其中所述动力轮被布置成沿自身轴线转动,且该动力轮与所述驱动轮联动,所述磁铁组包括相对布置且具有异性磁极的两块磁铁,所述线圈连接在所述动力轮上,且在动力轮转动
的过程中切割两块磁铁产生的磁感线,所述线圈与所述电磁铁电性连接这样电组件的设计,可以将驱动轮行进的动力转化为电能,从而供给电磁铁,驱动轮运转方向不同,切割磁感线的方向也不同,就会使电磁铁产生不同的磁性,进而实现与磁性件的吸合或者排斥,从而确保驱动轮的上下移动。
24.优选地,所述连接座还包括有本体,所述本体的其中一个侧壁上向外延伸有所述的安装轴,所述本体内具有空腔,所述磁铁组和线圈均设于该空腔内,所述安装轴上贯穿的设有连通所述空腔的通孔,所述动力轮和线圈通过穿设在该通孔中的联动杆连接在一起。
25.具体地,所述安装轴在远离本体的端壁上向内凹陷形成嵌槽,所述动力轮嵌设在该嵌槽内,且所述嵌槽的内部具有周向布置的第一齿部,对应在动力轮的周壁上设有匹配第一齿部啮合的第二齿部,所述驱动轮和动力轮通过第一齿部和第二齿部的啮合形成联动。
26.为了确保驱动轮具有一定的缓冲,同时防止磁性吸合过于突然,还包括有弹性件,在所述连接座处于向下移动的状态下,该弹性件处于蓄能状态并作用在连接座上,以使所述连接座始终具有向上移动而复位的趋势。
27.具体地,所述连接座在前后两侧均设有开口朝下的容置腔,所述壳体底部在与对应位置设有向上延伸且与所述容置腔相匹配的定位柱,所述弹性件为设于所述容置腔内、且两端分别与容置腔顶壁及定位柱上端相抵的弹簧。
28.优选地,所述清洁机为吸尘器或扫地机器人。
29.与现有技术相比,本发明的优点在于:该清洁机中,通过致动件将清洁机前进或者后退的动作与挡尘组件中的门板结构联系起来,当清洁机前进时,在致动件的作用下,对应吸尘腔后侧的门板结构关闭而前侧的门板结构打开,这样自前方迎向清洗机而来的灰尘杂质就不会被遗漏;反之,当清洁机后退时,对应吸尘腔前侧的门板结构关闭而后侧的门板结构打开,这样清洁机的移动驱使致动件作用于门板结构、使门板结构打开或者关闭的形式,无需额外的驱动机构,也无需其他的操作,即可实现清洁机清洁状态的切换,十分方便,对于细小而零碎的杂物,当吸尘腔没有完全吸附干净时,门板结构起到了保障作用,确保清洁效果。
附图说明
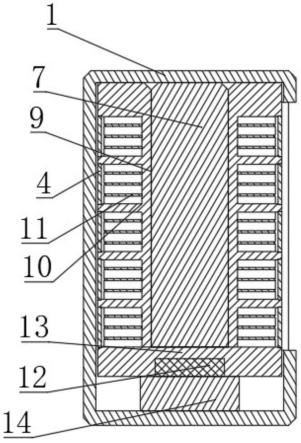
30.图1为本发明实施例中清洁机的整体结构示意图;
31.图2为图1省略部分结构后另一角度的结构示意图;
32.图3为图2省略部分结构的整体示意图;
33.图4为省略挡尘组件后清洁机的整体结构示意图;
34.图5为省略驱动轮后清洁机的整体结构示意图;
35.图6为图5中a处的放大示意图;
36.图7为本实施例中省略部分结构后驱动轮的结构示意图;
37.图8为本实施例中省略部分结构后的剖视图;
38.图9为图8另一角度的结构示意图;
39.图10为清洁机处于前进状态的示意图;
40.图11为清洁机处于后退状态的示意图;
41.图12为清洁机的整体示意图。
具体实施方式
42.以下结合附图实施例对本发明作进一步详细描述。
43.如图1至图12所示,为本发明的一个优选实施例,在本实施例中,该清洁机包括壳体1、挡尘组件和致动件20,其中壳体1在清洁机行进方向的前侧具有开口朝下的吸尘腔11,即该吸尘腔11的底部为吸尘口111,在壳体1后部还设有与吸尘口111流体连通的出风口113,沿着气流流动路径,上述的出风口113位于吸尘口111的下游,这样吸尘口111、吸尘腔11和出风口113就会形成完整的吸尘流道。当然,为了确保清洁机覆盖足够的清洁面积,吸尘腔通常至少设置两个,本实施例中以4个吸尘腔为例做以说明,4个吸尘腔形成吸尘流道的上游段,而邻近出风口113的位置形成吸尘流道的下游段,通常而言,吸尘流道的上游段和下游段并不一定是相同流向,实际上,由于吸尘口111和出风口113在实际生产中的朝向很多时候是相反的,例如吸尘口111通常朝下设置,以方便吸取底面、桌面等表面的灰尘,而为了方便排风,出风口113则往往是朝上或者朝向侧向。因此,为了配合吸尘口111的设计,本实施例中的吸尘流道在上游段基本竖向或者与竖向略呈角度布置;而为了配合出风口113的设计,吸尘腔11在下游段则基本水平或者与水平略成角度布置。
44.当然,为了实现吸尘功能,除了壳体1内各个部件的配合,还需要其它结构来配合实现:清洁机还包括有风机7和用来分离水及灰尘混合物的分离模块8,沿着气流流动路径,分离模块8位于壳体1和风机7之间,分离模块8的进口端与壳体1的出口端流体连通,分离模块8的出口端与风机7的进口端流体连通。清洁机可以为吸尘器或扫地机器人或类似的清洁设备,参见图12,本实施例中以吸尘器为例做以解释说明,但并不以此为限定。
45.在本实施例中,上述的刷头14用来对待清洁物体进行清扫,该刷头14设置在吸尘腔11的吸尘口111处。此处的刷头14可以是固定的刷子,也可以是滚刷等其他可动的刷头,本实施例则采用盘刷,该盘刷以转动的方式实现清洁,且盘刷的转动轴线竖向延伸,以确保与待清洁表面的最大接触面积,进而提升对清洁效果。
46.本实施例中的壳体1底部与待清洁地面之间留有缝隙,以形成供灰尘进入吸尘腔11的吸尘通道,上述的挡尘组件包括两个相对布置在吸尘腔11前后两侧的门板结构2,各个门板结构2的延伸方向与清洁机的行进方向相交叉,而致动件20设于壳体的底部且分别与各个门板结构2驱动连接,并且,在清洁机处于前进状态下,该致动件20作用在两个门板结构2上,以使吸尘腔11前侧的门板结构2处于打开状态而后侧的门板结构2处于关闭状态,进而使吸尘通道的进口朝前;
47.在清洁机处于后退状态下,该致动件20作用在两个门板结构2上,以使吸尘腔11前侧的门板结构2处于关闭状态而后侧的门板结构2处于打开状态,进而使吸尘通道的进口朝后。
48.在本实施例中,上述的门板结构2包括定板21和动板22,定板21布置在壳体1底部,且动板22至少局部位于壳体1内,壳体1在对应位置开设有供动板22穿过的穿口。定板21上沿长度方向设有多个间隔布置的吸尘口2a,动板22与定板21并排布置且能沿定板21的长度方向来回滑移,以同步打开或者关闭的吸尘口2a,进而使门板结构2处于打开状态或者关闭状态。
49.为了保证致动件20在壳体1内有较为合适的滑动区间,上述的壳体1内设有定位框14,致动件20前后滑移的容置在该定位框14内,且至少局部外露于壳体1,各门板结构2的动板22和致动件20之间均对应设有连杆23,在清洁机前进或者后退的状态下,致动件20对应的向后或者向前滑移,进而带动对应的门板结构2处于打开状态,而另外一个门板结构2处于关闭状态。
50.在本实施例中,该清洁机还包括驱动轮3和调节机构4。驱动轮3转动地连接在壳体1上且转动轴线与清洁机的行进方向相垂直,且驱动轮3被布置成能相对壳体1上下移动,而调节机构4的动力输出端与驱动轮3驱动连接,并能在清洁机处于后退状态下作用在驱动轮3上,以使驱动轮3相对壳体1向下移动、壳体1的底壁自后向前向下倾斜,从而在壳体1后侧的底壁与待清洁地面之间形成供杂物灰尘进入的第一间隙4a。通过调节机构的作用,使得清洁机在后退状态下,其驱动轮处于向下移动的状态,此时清洁机壳体的底壁呈自后向前向下倾斜的趋势,这样在清洁机的后部就会形成供灰尘杂物自清洁机后侧进入吸尘腔的第一间隙,加之与对应的门板结构配合,确保当清洁机后退时,清洁机的后侧具有足够的空间供灰尘杂物吸入吸尘腔,进而保证了清洁机在运动到各个方向时,一旦部分杂物灰尘漏掉,就可以通过操作清洁机后退来实现吸尘,无需重新调转方向。
51.在本实施例中驱动轮3的上下移动并不会直接使清洁机对应的产生状态切换,而是在壳体1底部的两侧中,每一侧均设有一个滚轮12,该滚轮12邻近吸尘腔11布置,以使清洁机在前进状态下,其底壁自前向后向下倾斜,从而在吸尘腔11与待清洁地面之间形成第二间隙4b,这样滚轮的存在,相当于翘板的作用,方便在驱动轮3上下移动时,整个清洁机清洁状态的切换。
52.在本实施例中,上述壳体1在与驱动轮3对应的位置开设有竖向延伸的轴孔13,壳体1内还设有相对壳体1上下移动的连接座5,该连接座5具有能外露于轴孔13的安装轴51,驱动轮3设于该安装轴51上,并且,在清洁机处于后退状态下,调节机构4的动力输出端作用在该连接座5,并使该连接座5带动安装轴51、驱动轮3同步向下移动。连接座5还包括有本体52,本体52的其中一个侧壁上向外延伸有的安装轴51。本实施例中的调节机构4包括设于连接座5上的电磁铁41以及设于壳体1内、并与电磁铁41磁性配合的磁性件42,磁性件42布置在电磁铁的下方,且在清洁机处于后退状态下,电磁铁41与磁性件42相对的磁极为同性磁极。还包括有用来将驱动轮3的动能转化为电磁铁41电能的电组件43,电组件43包括动力轮431、线圈432以及磁铁组433,其中动力轮431被布置成沿自身轴线转动,且该动力轮431与驱动轮3联动,磁铁组433包括相对布置且具有异性磁极的两块磁铁,线圈432连接在动力轮431上,且在动力轮431转动的过程中切割两块磁铁产生的磁感线,线圈432与电磁铁41电性连接。上述的本体52内具有空腔5a,磁铁组433和线圈432均设于该空腔5a内,安装轴51上贯穿的设有连通空腔5a的通孔,动力轮431和线圈432通过穿设在该通孔中的联动杆511连接在一起。安装轴51在远离本体52的端壁上向内凹陷形成嵌槽512,动力轮431嵌设在该嵌槽512内,且嵌槽512的内部具有周向布置的第一齿部,对应在动力轮431的周壁上设有匹配第一齿部啮合的第二齿部,驱动轮3和动力轮431通过第一齿部和第二齿部的啮合形成联动。
53.在本实施例中,为了确保驱动轮具有一定的缓冲,同时防止磁性吸合过于突然,还包括有弹性件6,在连接座5处于向下移动的状态下,该弹性件6处于蓄能状态并作用在连接座5上,以使连接座5始终具有向上移动而复位的趋势。具体而言,连接座5在前后两侧均设
有开口朝下的容置腔5b,壳体1底部在与对应位置设有向上延伸且与容置腔5b相匹配的定位柱5c,弹性件6为设于容置腔5b内、且两端分别与容置腔5b顶壁及定位柱5c上端相抵的弹簧。
54.本发明所称的“流体连通”是指两个部件或部位(以下统一分别称为第一部位、第二部位)之间的空间位置关系,即流体(气体、液体或两者的混合)能从第一部位沿着流动路径流动或/和被运送到第二部位,可以是所述的第一部位、第二部位之间直接相连通,也可以是第一部位、第二部位之间通过至少一个第三者间接连通,该第三者可以是诸如管道、通道、导管、导流件、孔、槽等流体通道、也可以是允许流体流过的腔室或以上组合。
55.此外,在本发明的说明书及权利要求书中使用了表示方向的术语,诸如“前”、“后”、“上”、“下”、“左”、“右”、“侧”、“顶”、“底”等,用来描述本发明的各种示例结构部分和元件,但是在此使用这些术语只是为了方便说明的目的,是基于附图中显示的示例方位而确定的。由于本发明所公开的实施例可以按照不同的方向设置,所以这些表示方向的术语只是作为说明而不应视作为限制,比如“上”、“下”并不一定被限定为与重力方向相反或一致的方向。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。